Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
PRZEMYSŁOWE SYSTEMY INFORMATYCZNE Cz. 7. Systemy automatyki i pomiarów

2
1. Wstęp 2. Cechy przemysłowych systemów komputerowych 3. Zastosowanie systemów operacyjnych 4. Kondycjonowanie sygnałów 5. Przetwarzanie analogowo-cyfrowe 6. Urządzenia i systemy przemysłowe 7. Podział systemu na bloki funkcjonalne

3
1. Wstęp Rozwój techniki komputerowej wymuszały między innymi potrzeby militarne, badania nuklearne, podbój kosmosu oraz rozwój nowoczesnych gałęzi przemysłu, np. elektroniki. Komputerowe przemysłowe systemy sterowania zaczęły powstawać głównie z następujących powodów: wzrost wymagań sterowania nowoczesnych procesów technologicznych, obniżka kosztów produkcji, wzrost skali produkcji, wzrost jakości produkcji. Było to związane z potrzebami: wprowadzania bardziej złożonych algorytmów sterowania, diagnostyki stanu urządzeń i przebiegu procesów oraz alarmowania o stanach niewłaściwych lub awaryjnych, powiązania ze sobą lokalnych układów sterowania w większe systemy sterowania, wprowadzania modyfikacji funkcjonalnych systemu, dotychczas utrudnionych ze względu na sprzętowy charakter konfiguracji systemu, zbierania danych w celu późniejszego ich przetwarzania.

4
Wprowadzenie do celów sterowania układów mikrokomputerowych pozwoliło na przełamanie tych ograniczeń. Urządzenia i systemy komputerowe, stosowane w przemyśle, biorąc pod uwagę ich wielkość i sposób komunikacji, można podzielić na następujące grupy: urządzenia, bazujące na jednym mikroprocesorze lub mikrokontrolerze, urządzenia z wieloma procesorami, komunikującymi się poprzez szyny danych (potrzebne sterowniki szyny), systemy z wieloma procesorami, wykorzystującymi do komunikacji interfejsy szeregowe systemy komputerowe, pracujące w sieci.
, systemy z wieloma procesorami, wykorzystującymi do komunikacji interfejsy szeregowe. systemy komputerowe, pracujące w sieci.")
5
2. Cechy przemysłowych systemów komputerowych
Szczególne wymagania dotyczą komputerowych systemów, bezpośrednio służących produkcji. Zwłaszcza należą do nich: bezpieczeństwo działania, niezawodność działania, praca w czasie rzeczywistym. Przykładami mogą być elektrownie atomowe w Thorn i Czernobylu, oraz procesy technologiczne wytwarzania kryształów i elementów półprzewodnikowych.

6
3. Zastosowanie systemów operacyjnych
System operacyjny jest programem integrującym sprzętowe i programowe zasoby komputera oraz tworzącym środowisko dla przygotowania i wykonania programów aplikacyjnych. System operacyjny czasu rzeczywistego (RTOS – Real Time Operating System) jest to taki system, który gwarantuje wykonanie zadania w nieprzekraczalnym czasie. System operacyjny czasu rzeczywistego ma ściśle zdefiniowane, stałe ograniczenia czasowe. Przetwarzanie danych musi zakończyć się przed upływem określonego czasu.
 jest to taki system, który gwarantuje wykonanie zadania w nieprzekraczalnym czasie. System operacyjny czasu rzeczywistego ma ściśle zdefiniowane, stałe ograniczenia czasowe. Przetwarzanie danych musi zakończyć się przed upływem określonego czasu.")
7
System operacyjny czasu rzeczywistego, zastosowany w komputerowym urządzeniu lub systemie przemysłowym musi spełniać szereg wymagań: zapewniać dużą niezawodność pracy, odporność ma awarię sprzętu i oprogramowania, zajmować niewielką przestrzeń w pamięci RAM i na dysku, posiadać architekturę modularną, ułatwiającą konfigurowanie sprzętu i oprogramowania, umożliwiać komunikację z innymi blokami systemu, takimi jak urządzenia wykonawcze, które często są oddalone przestrzennie i wyposażone we własne systemy operacyjne i oprogramowanie, umożliwiać pracę sieciową.

8
Głównymi kryteriami porównawczymi dla systemów czasu rzeczywistego są:
czas przełączania zadania (Context or Task Swich Time), czas utajnienia przerwania (Interrupt Latency), to znaczy czas po którym rozpoczyna się realizacja żądanego zadania,
, czas utajnienia przerwania (Interrupt Latency), to znaczy czas po którym rozpoczyna się realizacja żądanego zadania,")
9
System QNX jest systemem operacyjnym czasu rzeczywistego, przeznaczonym głównie do pracy w sieci, której węzłami są komputery PC. Umożliwia on tworzenie programów użytkowych, złożonych z wielu współbieżnych procesów. Składa się on z: Jądra, które pełni rolę egzekutora. Jądra systemów operacyjnych czasu rzeczywistego są z reguły niewielkie, zaś zakres zadań ograniczony. Zadania jądra systemu QNX obejmują: szeregowanie procesów, realizację komunikacji między procesami, przyjmowanie zgłoszeń przerwań.

10
Menadżerów systemowych, wykonujących procesy systemowe
Menadżerów systemowych, wykonujących procesy systemowe. Składają się one z : menadżera procesów, który nadzoruje tworzenie i usuwanie procesów, rejestrację nazw procesów i odmierzanie czasu, menadżera plików, który organizuje system plików w pamięciach dyskowych, taśmowych i na dyskach optycznych, menadżera urządzeń, który formatuje strumienie danych pomiędzy procesami i urządzeniami zewnętrznymi, sterowników urządzeń, które inicjują i kończą działanie urządzeń zewnętrznych oraz obsługują zgłaszane przerwania, menadżera sieci, który obsługuje łącza sieciowe oraz komunikację węzłów sieci.

11
Wszystkie procesy, zarówno użytkowe jaki i systemowe, komunikują się za pomocą funkcji, realizowanych przez jądro systemu. Procesy mogą być wykonywane w różnych węzłach lub korzystać z zasobów innych węzłów. Procesy wykonywane podczas sesji są powiązane hierarchiczną zależnością, wynikającą z kolejności ich tworzenia. Są to: proces macierzysty, procesy potomne.

12
Procesy na tym samym poziomie priorytetu są szeregowane zgodnie z jednym następujących algorytmów:
Algorytm FIFO, który wybiera do wykonania proces najdłużej oczekujący. Proces te wykonuje do zakończenia lub zawieszenia. Algorytm karuzelowy, który wybiera procesy kolejno i wykonuje je przez określony odcinek czasu slice. Algorytm adaptacyjny, który wybiera procesy kolejno, podobnie jak w algorytmie karuzelowym, po czym obniża priorytet. Jeżeli proces nie jest przez pewien czas wykonywany – przywrócony jest wyższy priorytet.

13
4. Kondycjonowanie sygnałów
Informacja o wartościach zmiennych, opisujących procesy przemysłowe, dostarczana jest przeważnie przez czujniki, które przetwarzają sygnały różnych wielkości fizycznych na ogół w sygnały elektryczne – są to najczęściej sygnały napięciowe i prądowe. Przykładem takiego przetwarzania mogą być czujniki temperatury. Jako czujniki temperatury używa się najczęściej: Termoelementy, których końce znajdują się w obszarach o temperaturze mierzonej i temperaturze odniesienia. Pomiar temperatury następuje przez pomiar napięcia różnicowego tych termoelementów. Rezystory, których oporności silnie zależy od temperatury, np. czujniki, wykonane z drutu platynowego Pt100 lub termistory, czyli czujniki półprzewodnikowe o działaniu objętościowym. Pomiar temperatury następuje w tym przypadku poprzez pomiar napięcia wywoływanego przez znany prąd, przepływający przez czujnik, umieszczony w obszarze o mierzonej temperaturze.

14
Półprzewodnikowe czujniki złączowe, produkowane jako układy scalone
Półprzewodnikowe czujniki złączowe, produkowane jako układy scalone. Wartość prądu wyjściowego tych układów jest informacją o temperaturze złącza. Ostatecznie pomiar temperatury przeprowadza się przez pomiar spadku napięcia na rezystorze wzorcowym, wywołany przez wspomniany prąd złącza. Do czujników tego rodzaju należy czujnik AD 590 firmy Analog Devices. Jest to układ o dwóch końcówkach o czułości 1A/1C, dokładności 0.5C w zakresie –55C150C, zasilany napięciem stałym z zakresu 4V30V.

15
Dalsze przetwarzanie mierzonych sygnałów w cyfrowych układach automatyki wymaga przetworzenia analogowo-cyfrowego (A/C). Z reguły górne wartości zakresy zmienności sygnałów wejściowych tych przetworników są znormalizowane. Jest to zazwyczaj wartość z przedziału 1V10V napięcia stałego (DC). Ze względu na błędy kwantowania największą dokładność przetworzenia A/C uzyskuje się dla wartości sygnałów analogowych, bliskich górnej granicy zakresu wejściowego. Z reguły pracuje się z zakresie 10%100% tej wartości. W efekcie bardzo istotną sprawą przy pomiarach wartości sygnałów elektrycznych jest doprowadzenie poziomu sygnałów mierzonych do wartości tego zakresu.
. Ze względu na błędy kwantowania największą dokładność przetworzenia A/C uzyskuje się dla wartości sygnałów analogowych, bliskich górnej granicy zakresu wejściowego. Z reguły pracuje się z zakresie 10%100% tej wartości. W efekcie bardzo istotną sprawą przy pomiarach wartości sygnałów elektrycznych jest doprowadzenie poziomu sygnałów mierzonych do wartości tego zakresu.")
16
W przypadku wspomnianych sygnałów elektrycznych, odwzorowujących temperaturę, ich zakres wynosi kilkadziesiąt do kilkuset mV. Dla uzyskanie właściwego poziomu sygnału na wejściu przetwornika A/C konieczne jest wzmocnienie tego sygnału za pośrednictwem wzmacniacza analogowego. Sygnał mierzony, zwłaszcza o niskim poziomie napięcia, ulega zakłóceniom, głównie za pośrednictwem urządzeń o dużym poziomie mocy. Warto tu przypomnieć, że sygnał z termoelementu PtRh10%-Pt, odpowiadający przyrostowi 1C ma wartość ok. 10V, zaś napięcie zasilania grzejnika o mierzonej temperaturze może wynosić np. 220V. Różnica poziomów obu sygnałów jest więc większa niż milion (120dB). Dla eliminacji zakłóceń sygnału mierzonego konieczna jest filtracja. Możliwa jest filtracja na etapie obróbki sygnału analogowego i obróbki sygnału cyfrowego, po przetworzeniu A/C. Oba sposoby filtracji mają swoje wady i zalety i na ogół stosuje się je jednocześnie.
. Dla eliminacji zakłóceń sygnału mierzonego konieczna jest filtracja. Możliwa jest filtracja na etapie obróbki sygnału analogowego i obróbki sygnału cyfrowego, po przetworzeniu A/C. Oba sposoby filtracji mają swoje wady i zalety i na ogół stosuje się je jednocześnie.")
17
Filtracja analogowa ma na celu między innymi niedopuszczenie, aby sygnał wejściowy nie przekraczał zakresu dopuszczalnej zmienności sygnału w torze pomiarowym, np. ograniczeń wartości sygnału wyjściowego wzmacniacza lub górnej granicy sygnału wejściowego przetwornika A/C. Bardzo często do tego celu są stosowane dolnoprzepustowe filtry RC. Efekt filtracji za pośrednictwem takiego filtru przedstawia rys. 1. Stosując filtrację należy pamiętać, że zniekształca ona również sygnał użyteczny. Rozpatrując składowe częstotliwościowe sygnału zniekształcenie to dotyczy zarówno amplitudy jak i fazy.

18
Efekt filtracji sygnału za pośrednictwem filtru dolnoprzepustowego

19
Filtracja sygnału o postaci cyfrowej może być bardzo wyrafinowana, gdyż konstruktor toru pomiarowego dysponuje specjalizowanymi układami, w tym DSP. Podczas stosowania filtrów cyfrowych warto jednak zwrócić uwagę na niebezpieczeństwo aliasingu. Polega ono na tym, że podczas próbkowania z szybkością fp próbek na sekundę, jeżeli k jest dowolną liczbą całkowitą,, nie jesteśmy w stanie rozróżnić spróbkowanych wartości przebiegu sinusoidalnego o częstotliwości f0 od przebiegu sinusoidalnego o częstotliwości (f0+kfp). Ilustruje to rys. 2. W efekcie filtr cyfrowy dolnoprzepustowy przenosi również w sposób istotny składowe sygnałów o częstotliwościach w określonych wyższych pasmach widma. Jest to inny z powodów stosowania wstępnej filtracji analogowej, która eliminuje w tym przypadku skuteczniej składowe sygnału o niepożądanych częstotliwościach. Dla ilustracji na rys. 3 przedstawiona jest częstotliwościowa przepustowość filtru uśredniającego z czterech próbek.
. Ilustruje to rys. 2. W efekcie filtr cyfrowy dolnoprzepustowy przenosi również w sposób istotny składowe sygnałów o częstotliwościach w określonych wyższych pasmach widma. Jest to inny z powodów stosowania wstępnej filtracji analogowej, która eliminuje w tym przypadku skuteczniej składowe sygnału o niepożądanych częstotliwościach. Dla ilustracji na rys. 3 przedstawiona jest częstotliwościowa przepustowość filtru uśredniającego z czterech próbek.")
20
Próbkowanie przebiegów o częstotliwościach f0 i f1=f0+fp
Próbkowanie przebiegów o częstotliwościach f0 i f1=f0+fp. przy częstotliwości próbkowania fp (f0=100Hz, fp.=1000Hz, f1=1100Hz).
.")
21
Charakterystyka częstotliwościowa filtru uśredniającego z czterech próbek przy częstotliwości próbkowania 1Hz.

22
Inną istotną sprawą podczas pomiaru wartości zmiennych procesu technologicznego jest charakterystyka czujników. W wielu przypadkach charakterystyki te, np. charakterystyki czujników temperatury, są nieliniowe. Zachodzi więc konieczność ich linearyzacji. Obecnie linearyzacja ta zachodzi z reguły po przetworzeniu sygnałów analogowych w sygnały cyfrowe. Omówione powyżej zabiegi, takie jak wzmacnianie sygnałów mierzonych, ich filtracja i linearyzacja noszą nazwę kondycjonowania sygnałów. Jest to zagadnienie wymagające specjalistycznej wiedzy, na którą nie ma miejsca na podczas niniejszego wykładu, niemniej warto zasygnalizować ten rodzaj problemów, związanych z przemysłowymi systemami informatycznymi.

23
5. Przetwarzanie analogowo-cyfrowe
W systemach przemysłowych występuje konieczność pomiarów wartości fizycznych: jak napięcia, prądu, ciśnienia, temperatury, przepływu itp. Ponieważ systemy komputerowe wykorzystują sygnały w formie dyskretnej, zachodzi konieczność stosowania przetworników analogowo-cyfrowych. Przetworniki analogowo-cyfrowe można ogólnie podzielić na: przetworniki wartości chwilowej, przetworniki całkujące. Jednym z przetworników wartości chwilowej jest przetwornik kompensacyjny. Generuje on przyrosty sygnału odniesienia o malejących amplitudach np. binarnie. Ilustruje to rys. 4, na którym kolejne przyrosty mają wartości: 1.0, 0.5, 0.25, 0.125, itd.

24
Proces kompensacyjnego pomiaru z binarnie malejącymi amplitudami przyrostów napięcia odniesienia.

25
Opisywaną operację kompensacyjnego przetwarzania analogowo-cyfrowego można zapisać w postaci zależności: (1) gdzie przyjęto oznaczenia: Ux - napięcie mierzone, U0 - napięcie odniesienia, odpowiadające przyrostowi w pierwszym kroku kompensacji i - krok kompensacji, ai - waga sumowania, wynosząca 1 w przypadku pozostawienia przyrostu w sygnale kompensacyjnym lub 0 w przypadku jego odrzucenia. Wartości wyrazów ciągu wag ai odpowiadają w tym przypadku wartości mierzonego sygnału, zapisanej w kodzie binarnym. Należy zwrócić uwagę, że jest to stosunkowo szybki sposób przetwarzania, ponieważ np. po dziesięciu krokach uzyskuje się wynik pomiaru z rozdzielczością 1/1024, czyli ok. 0.1% pełnej skali.
 gdzie przyjęto oznaczenia: Ux - napięcie mierzone, U0 - napięcie odniesienia, odpowiadające przyrostowi w pierwszym kroku kompensacji. i - krok kompensacji, ai - waga sumowania, wynosząca 1 w przypadku pozostawienia przyrostu w sygnale kompensacyjnym lub 0 w przypadku jego odrzucenia. Wartości wyrazów ciągu wag ai odpowiadają w tym przypadku wartości mierzonego sygnału, zapisanej w kodzie binarnym. Należy zwrócić uwagę, że jest to stosunkowo szybki sposób przetwarzania, ponieważ np. po dziesięciu krokach uzyskuje się wynik pomiaru z rozdzielczością 1/1024, czyli ok. 0.1% pełnej skali.")
26
Przetworniki wartości chwilowej mogą dokonywać pomiarów z bardzo dużą częstotliwością np. 330kHz, co w większości przypadków pozwala na dokładne odwzorowanie przebiegu sygnałów. W warunkach przemysłowych należy jednak liczyć się z dużymi zakłóceniami tych pomiarów. Jak wspomniano w poprzednim rozdziale, dla eliminacji tych zakłóceń można stosować filtrację w torach analogowych oraz filtracją cyfrową. Jednym z najsilniejszych źródeł zakłóceń w warunkach przemysłowych jest sieć zasilająca 50Hz. Dla wyeliminowania tych zakłóceń stosuje się całkujące przetwarzanie analogowo-cyfrowe. Warto zaznaczyć, że przetwarzanie tego rodzaju jest znacznie wolniejsze niż przetwarzanie wartości chwilowej.

27
Całkujące przetwarzanie analogowo-cyfrowe polega na całkowaniu przetwarzanego sygnału w okresie T0, równym okresowi sieci lub jego wielokrotności, oraz kompensacji wartości tej całki za pomocą całki sygnału odniesienia. Przyjmując oznaczenia: Ux(t) - sygnał przetwarzany, - wartość sygnału przetwarzanego, średnia dla okresu przetwarzania T0, t środek okresu przetwarzania, T okres przetwarzania, Uc(t0) - wynik przetwarzania, odniesiony do środka okresu przetwarzania, ogólnie całkę Uc(T0) sygnału przetwarzanego Ux(t),można zapisać w postaci: (2)
 - sygnał przetwarzany, - wartość sygnału przetwarzanego, średnia dla okresu przetwarzania T0, t0 - środek okresu przetwarzania, T0 - okres przetwarzania, Uc(t0) - wynik przetwarzania, odniesiony do środka okresu przetwarzania, ogólnie całkę Uc(T0) sygnału przetwarzanego Ux(t),można zapisać w postaci: (2)")
28
Przetwarzanie metodą podwójnego całkowania

29
Podczas całkowania napięcia odniesienia o przeciwnej polaryzacji –U0 sprowadza się wartość całki do zera w czasie Tx (3) W rezultacie uzyskuje się zależność (4) a więc czas Tx jest wynikiem przetwarzania średniej wartości sygnału Ux. Długość tego czasu po pomnożeniu przez współczynnik skalujący jest przekazywana na wyjście przetwornika.
 W rezultacie uzyskuje się zależność. (4) a więc czas Tx jest wynikiem przetwarzania średniej wartości sygnału Ux. Długość tego czasu po pomnożeniu przez współczynnik skalujący jest przekazywana na wyjście przetwornika.")
30
Eliminacja zakłóceń przez uśrednianie zakłóconego sygnału w czasie dwóch okresów sieci zasilającej (40ms).
.")
31
Innym sposobem zapisu równania (2) jest splot funkcji x(t) z funkcją prostokątną g(t)
(5) gdzie (6) W rzeczywistym przetworniku analogowo-cyfrowym całkowanie następuje w niepokrywających się przedziałach czasowych, co można uwzględnić przez próbkowanie sygnału Uc(t).
 gdzie. (6) W rzeczywistym przetworniku analogowo-cyfrowym całkowanie następuje w niepokrywających się przedziałach czasowych, co można uwzględnić przez próbkowanie sygnału Uc(t).")
32
Ponieważ wynik całkowania w przedziale o szerokości T można zapisać jako splot z funkcją prostokątną, transformata Fouriera funkcji prostokątnej stanowi transmitancję przetwornika całkującego. Transmitancja G(j) funkcji g(t) ma postać: (7)
")
33
Tłumienie zakłóceń przez całkujący przetwornik analogowo-cyfrowy

34
Dwukrotne całkowanie jest jednym z najprostszych sposobów przetwarzania całkującego.
W trakcie rozwoju tej techniki opracowano sposoby precyzyjniejszego całkowania, polegające na wielokrotnym całkowaniu sygnału przetwarzanego i sygnału odniesienia. Obecnie jednak popularniejsza stała się technika przetwarzania całkującego, zwana “sigma-delta”. W technice tej następuje jednoczesne całkowanie sygnału przetwarzanego i impulsów sygnału odniesienia o ściśle określonej szerokości i amplitudzie. Liczba impulsów, konieczna do kompensacji całki sygnału przetwarzanego w okresie całkowania T0, odpowiada wynikowi przetwarzania. Dla uzyskania dokładnej długości impulsów odniesienia są one synchronizowane zegarem – rys. 8. Komparacja wartości całki z poziomem odniesienia (na rys. 8 jest to poziom zerowy) również występuje w chwilach, wyznaczonych zegarem.
 również występuje w chwilach, wyznaczonych zegarem.")
35
Całkowanie sygnału przetwarzanego i impulsów odniesienia w metodzie sigma-delta.

36
Przy szybkich procesach wadą całkującego przetwornika analogowo-cyfrowego może być stosunkowo wolne przetwarzanie. Dla przetwornika z wielokrotnym całkowaniem, skuteczne tłumienie częstotliwości sieci powoduje, że dolna częstotliwość przetwarzania wynosi 25Hz, zaś dla przetworników typu delta-sigma wynosi 50Hz.

37
6. Urządzenia i systemy przemysłowe
Dla celów przemysłowych powstało wiele różnych baz sprzętowych i programowych. Początkowo powstawały ona na lokalne potrzeby. Między innymi na potrzeby przemysłu półprzewodnikowego w Polsce pracował Przemysłowy Instytut Elektroniki w Warszawie. Opracowywał on urządzenia technologiczne i pomiarowe dla celów tego przemysłu. Powstał tam miedzy innymi system MIKROSTER, przeznaczony do tworzenia układów sterowania, który bazował na 8-bitowym mikroprocesorze Intel 8080 oraz Zilog Z-80. Był on oprogramowywany w asemblerze oraz przy użyciu prostych kompilatorów języków wyższego rzędu, na przykład Pascala, opracowanych dla wspomnianych mikroprocesorów. System ten był później produkowany przez niezależną prywatną firmę, jednak ze względu na niewielkie rozpowszechnienie i pojawianie się na rynku coraz doskonalszych systemów sterowania opracowywanych przez silniejsze firmy, przestał się rozwijać i doskonalić, w wyniku czego został zarzucony.

38
W trakcie rozwoju komputerowych systemów przemysłowych pojawiły się między innymi:
sterowniki PLC, urządzenia kontrolno-pomiarowe sterowane mikrokontrolerami, systemy z wbudowanymi komputerami, karty wyjściowe i wejściowe dla komputerów klasy PC oraz wersji przemysłowych tych komputerów, np. karty firm Advantech i National Instruments. moduły rozproszonych systemów zbierania danych i sterowania, współpracujące z jednostką centralną, np. moduły serii ADAM firmy Advantech lub FieldPoint firmy National Instruments, systemy rozproszone, sprzężone za pośrednictwem sieci, zapewniającej dostęp w czasie rzeczywistym do danych i wirtualne sterowanie procesem z wybranych punktów systemu . Niejednokrotnie stosowane są też systemy o technice mieszanej. Nie zawsze kwalifikacja do wymienionych grup jest ostra, gdyż system z wbudowanym komputerem może być traktowany jako moduł systemu rozproszonego. Obserwowany jest też ciągły rozwój wspomnianych systemów.

39
Przy omawianiu kart obiektowych, instalowanych bezpośrednio na szynie komputera należy zwrócić uwagę na stosowane szyny. Do niedawna w komputerach klasy PC, które w wersji przemysłowej, stosowane są stosunkowo często do celów sterowania o pomiarów stosowano szynę ISA (Industry Standard Architecture), przesyłającą równolegle 16 bitów z częstotliwością 8MHz. W ostatnim okresie szyna ta została praktycznie wyparta przez szynę PCI (Peripheral Component Interconnect), przesyłająca równolegle 32 bity lub 64 bity z częstotliwością 66 MHz, co umożliwia transmisję 532 MB w ciągu sekundy. Praca szyny jest synchronizowania przez zegar procesora w zakresie 20_33 MHz. Wielką zaletą szyny PCI jest automatyczna konfiguracja adresów nowo dołączonych kart. Eliminuje to ewentualne kolizje adresów i przerwań, które występują przy zastosowaniu szyny ISA. Trwają prace nad jeszcze szybszą transmisją. Np. szyna PCI-X (Peripheral Component Interconnect Extended) pracuje z częstotliwością do 133MHz. Umożliwia to transmisję 1.06 GB na sekundę. Powstały też modyfikacje tej czyny, jak na przykład szyna firmy National Instruments.
, przesyłającą równolegle 16 bitów z częstotliwością 8MHz. W ostatnim okresie szyna ta została praktycznie wyparta przez szynę PCI (Peripheral Component Interconnect), przesyłająca równolegle 32 bity lub 64 bity z częstotliwością 66 MHz, co umożliwia transmisję 532 MB w ciągu sekundy. Praca szyny jest synchronizowania przez zegar procesora w zakresie 20_33 MHz. Wielką zaletą szyny PCI jest automatyczna konfiguracja adresów nowo dołączonych kart. Eliminuje to ewentualne kolizje adresów i przerwań, które występują przy zastosowaniu szyny ISA. Trwają prace nad jeszcze szybszą transmisją. Np. szyna PCI-X (Peripheral Component Interconnect Extended) pracuje z częstotliwością do 133MHz. Umożliwia to transmisję 1.06 GB na sekundę. Powstały też modyfikacje tej czyny, jak na przykład szyna firmy National Instruments.")
40
6.1. STEROWNIKI PLC Nazwa PLC oznacza dosłownie programowalne sterowniki logiczne (Programmable Logic Controllers). Podstawową zaletą tych sterowników jest modularna budowa oraz wysoki poziom sygnałów logicznych, często włączanych przy użyciu przekaźników. Wysoki poziom sygnałów i separacja galwaniczna zabezpieczają przed wpływem zakłóceń na działanie sterownika. Pierwsze sterowniki logiczne powstały przed około dwudziestu latami. Różnorodność zastosowań tworzyła potrzebę dostosowywania ich do różnych potrzeb. Doprowadziło to do powstania programowalnych sterowników logicznych. Do dzisiaj nie ma jednak jednolitego standardu określającego ich parametry i sposób programowania. Sterowniki PLC produkuje obecnie szereg firm np. Siemens, ABB, AGE, Allen-Bradley, Mitsubishi i Idec.
. Podstawową zaletą tych sterowników jest modularna budowa oraz wysoki poziom sygnałów logicznych, często włączanych przy użyciu przekaźników. Wysoki poziom sygnałów i separacja galwaniczna zabezpieczają przed wpływem zakłóceń na działanie sterownika. Pierwsze sterowniki logiczne powstały przed około dwudziestu latami. Różnorodność zastosowań tworzyła potrzebę dostosowywania ich do różnych potrzeb. Doprowadziło to do powstania programowalnych sterowników logicznych. Do dzisiaj nie ma jednak jednolitego standardu określającego ich parametry i sposób programowania. Sterowniki PLC produkuje obecnie szereg firm np. Siemens, ABB, AGE, Allen-Bradley, Mitsubishi i Idec.")
41
6.1.1. Programowanie drabinkowe
W początkowym okresie użytkowania tych sterowników programowanie komputerowe była słabo znane, zastosowano więc drabinkową reprezentację programów sterowania, nawiązującą do znanych wówczas szerzej schematów sterowania przekaźnikowego. Programowanie polega na wprowadzeniu do pamięci sterownika, rozrysowanych uprzednio, układów przekaźników normalnie otwartych i normalnie zamkniętych, które, zależnie od potrzeby, są połączone szeregowo i równolegle. Przekaźniki te, zależnie od wysterowania, mogą przełączać przekaźniki w następnych obwodach lub powodować określoną akcję, np. włączenie lub wyłączenie silnika. Z czasem kłopotliwe ręczne rozrysowywanie kombinacji przekaźników zostało zastąpione programowaniem przy użyciu komputera.

42
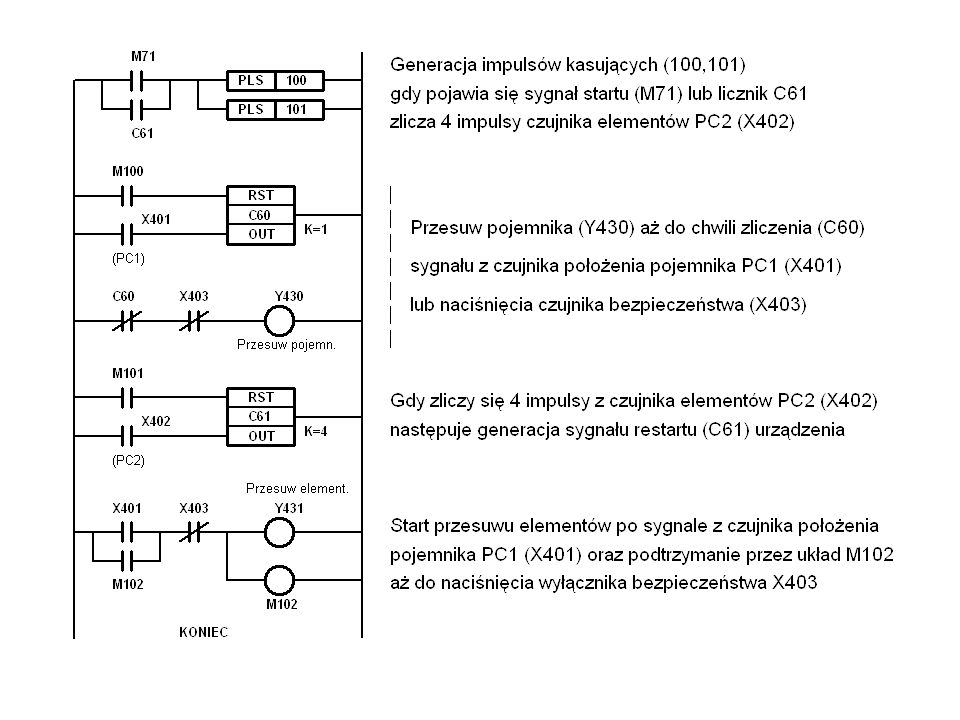
Przykładowy program drabinkowy sterownika PLC przedstawiony dla sterownika Mitsubishi serii F1 dotyczy sterowania przenośników taśmowych. Jeden z przenośników dostarcza elementy, które spadają do pudełek, umieszczonych na drugim przenośniku. Do pudełka ładowane są po 4 elementy. Oznaczenia wejść i wyjść układu sterowania są następujące: 401 Fotokomórka badająca pozycję załadowczą pudełka, 402 Fotokomórka wykrywająca spadanie elementu, 403 Wyłącznik bezpieczeństwa, 430 Przekaźnik, który włącza napęd przenośnika dolnego, 431 Przekaźnik, który włącza napęd przenośnika górnego.

43
Schemat sterowania układem przenośników

44
Sygnały wejściowe i wyjściowe sterownika PLC dla układu przenośników

46
Poszczególne szczeble programu drabinkowego zawierają informacje o stanie wejść oraz zmiennych logicznych programu. Są one przedstawione jako przekaźniki normalnie otwarte lub normalnie zamknięte. Przedstawione szczeble dotyczą wykonania następujących zadań: 1. Start programu odpowiada zamknięciu przekaźnika M71, co powoduje impulsowe zwarcie przekaźników M100 i M101 . 2. Zwarcie przekaźnika M100 powoduje skasowanie stanu licznika C60 3. Impuls z fotokomórki X401 powoduje zliczenie impulsu przez licznik C60. Zliczanie obejmuje K=1 impulsów. 4. Zerowy stan licznika C60 oraz stan spoczynkowy wyłącznika bezpieczeństwa X403 powodują przesuwanie się transportera z pudełkami Y430. Niezerowy stan licznika powoduje zatrzymanie transportera z pudełkami. 5. Impuls kasujący M101 powoduje kasowanie licznika C61. 6. Impulsy z fotokomórki X402 powodują zliczanie liczby spadających elementów do pudełka. Licznik C61 zlicza do K=4. 7. Jeżeli wyłącznik bezpieczeństwa X403 nie wyłącza przesuwu przenośnika z pojedynczymi elementami i nadchodzi impuls X401 o spozycjonowaniu pudełka, za pośrednictwem przekaźnika Y431 rusza przenośnik górny z elementami. Jednocześnie włącza się obwód podtrzymania ruchu za pośrednictwem przekaźnika M102.

47
Graf sterowania układu przenośników
Sterownik F1 Mitsubishi zawiera 32 timery i 30 liczników. Program może wykorzystywać ponad 100 instrukcji.

48
Proste sterowniki PLC W zależności od zastosowań stosuje się prostsze lub bardziej skomplikowane wersje sterowników PLC. Większość z nich ma budowę modułową, umożliwiającą odpowiednie skonfigurowanie wejść i wyjść sterownika pod względem ich rodzaju i liczby. Prostszym sterownikiem PLC, niż, przedstawiony na wstępie F1 Miubishi, jest sterownik SmartRelay firmy Idec z Japonii, który wytwórca nazywa także “inteligentnym przekaźnikiem”. Jego podstawowe parametry są przedstawione w tabeli 1.

49
Tabela 1. Podstawowe parametry sterownika SmartRelay
Wersje zasilania 230VAC, 24VAC, 24VDC, 12/24VDC Panel czołowy z wbudowanym pulpitem operatorskim lub bez pulpitu Poziomy sygnałów wejściowych 24VDC, 230VDC i inne Liczba wejść 8 Wejścia analogowe 010V Wyjścia przekaźnikowe 10A lub tranzystorowe 0.3A Liczba wyjść 4 Programowanie z pulpitu lub komputera PC Funkcje logiczne AND, OR, NAND, NOR, XOR, NOT Funkcje sekwencyjne symulacja przekaźników typu RS i T oraz liczników rewersyjnych Funkcje czasowe opóźnienia załączenie lub wyłączenia sygnału Programowanie tygodniowe

50
Sterownik SmartRelay może pracować w temperaturze 055C przy wilgotności 595% bez agresywnych gazów. Przykładem prostego modułowego sterownika tej samej firmy jest sterownik MicroSmart, który można konfigurować dla 10 do 88 sygnałów. Oferuje ona trzy moduły podstawowe: 6 wejść oraz 4 wyjścia, 9 wejść oraz 7 wyjść, 14 wejść oraz 10 wyjść oraz wiele modułów rozszerzeń, w tym analogowych. Przy programowaniu można używać 75 rozkazów. Sterownik może komunikować się z otoczeniem za pośrednictwem portów RS-232 i RS-485 oraz za pośrednictwem modemu. Montowany jest na szynie DIN. Ceny tego rodzaju sterowników zaczynają się od 120USD.

51
Innym przykładem sterowników PLC mogą być sterowniki Allen Bradley SLC 500, które są rodziną małych sterowników o konstrukcji modularnej, sterowanych 32-bitowym mikroprocesorem. Mogą być wyposażone we wsuwane moduły wejściowe i wyjściowe w liczbie do 30 sztuk. Moduły te stanowią między innymi: wejścia i wyjścia logiczne o różnym poziomie sygnałów napięcia i prądu stałego oraz zmiennego, a także przekaźnikowe, wejścia i wyjścia analogowe napięciowe i prądowe, porty sprzężenia szeregowego. Programuje się z ręcznego terminala z klawiatura lub z komputera, wyposażonego w specjalne oprogramowanie. Programowanie odbywa się metodą drabinek, w których szczeble mogą stanowić rysunki przekaźników NO i NZ. Instrukcje składają się między innymi z: instrukcji operacji arytmetycznych i porównania, instrukcji logicznych, instrukcji czasowych i licznika, instrukcji sterujących wyjściami, instrukcji specjalnych, służących np. do zaprogramowania regulatora PID.

52
6.1.3. Rozbudowane systemy sterowników PLC
W przemyśle do wytworzenia określonego wyrobu, np. samochodu, leku lub półprzewodnikowego układu scalonego, stosuje się jednak często wiele różnorodnych procesów technologicznych, realizowanych przez wiele maszyn i urządzeń. Stosuje się wówczas np. sterowanie: dopływem gazów technologicznych, ciśnieniem reaktorów, temperaturą reaktorów, procesami obróbki plastycznej, napędem walców, transportem materiałów i komponentów pomiędzy magazynem i urządzeniami technologicznymi, urządzeniami testującymi, sortownikiem wyrobów gotowych itp. .

53
Dla kompleksowego sterowania tego rodzaju procesami technologicznymi należy użyć sterowników bardziej złożonych niż omawiane w poprzednio. Sterowanie procesami składowymi wymaga często jednoczesnego uwzględniania większej ilości informacji o aktualnym stanie danego procesu. Łączność z pozostałymi procesami składowymi ogranicza się do przekazywania jedynie częściowych lub syntetycznych informacji o stanie danego procesu, a niewielkie opóźnienia w przekazywaniu tej informacji nie odgrywają często dużego znaczenia. Ponadto na ogół stosowana jest struktura hierarchiczna systemu. W związku z tym łączność pomiędzy procesami składowymi zachodzi często za pośrednictwem układu sterowania, który w stosunku do wspomnianych sterowników procesów elementarnych jest układem nadrzędnym w skali lokalnej lub globalnej.

54
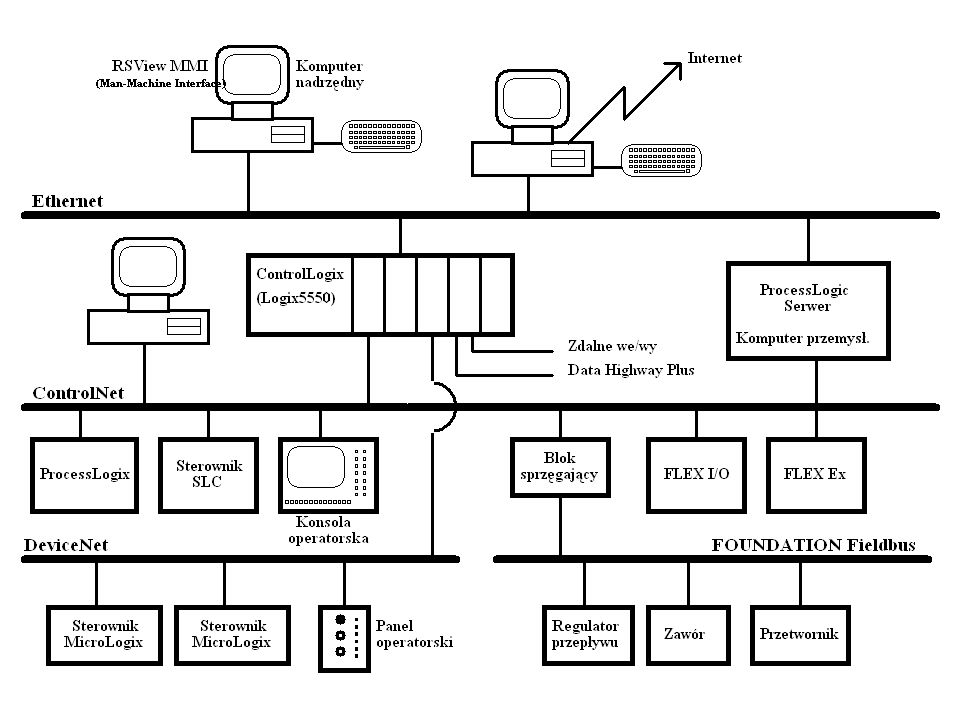
Grupę bardziej rozbudowanych systemów można przedstawić na przykładzie systemu sterowania ControlLogix firmy Allen-Bradley. Za pomocą tego systemu można realizować dowolną kombinacje układów sterowania sekwencyjnego, procesami sterowania ciągłego lub napędami. W systemie tym można zastosować zaawansowaną diagnostykę i programowanie symboliczne. Usprawnienie i przyśpieszenie komunikacji pomiędzy modułami systemu uzyskano dzięki pracy sieciowej. Komunikacyjne moduły systemu ControlLogix umożliwiaja pracę w otwartych sieci takich jak Ethernet, ControlNet i DeviceNet. Dzięki temu jest możliwa integracja z wieloma urządzeniami, przystosowanymi do pracy w tych sieciach.

55
W przypadku konfiguracji większego systemu sterowania należy dokonać kolejno następujących czynności: Specyfikacja urządzeń sprzężenia z obiektem sterowania (wejścia i wyjścia, w tym napędowymi czyli sterowania ruchem) Określenie topologii systemu i modułów komunikacyjnych Określenie wymagań dotyczących procesora Określenie liczby kaset Wybór zasilacza zapewniającego odpowiednią moc Wybór oprogramowania
 Określenie topologii systemu i modułów komunikacyjnych. Określenie wymagań dotyczących procesora. Określenie liczby kaset. Wybór zasilacza zapewniającego odpowiednią moc. Wybór oprogramowania.")
56
Topologia systemu określa rozłożenie komponentów systemu oraz konfigurację sieci. Należy w etapie określania topologii zadecydować o fizycznym rozmieszczeniu sterowników względem obiektu sterowania, który może być rozległy terytorialnie. Aby zwiększyć efektywność pracy wydzielonych procesów, związana z przesyłaniem informacji, należy je w całości obsługiwać przez pojedyncze sterowniki. Ponadto rozwiązanie takie ułatwia przyszłe zmiany w systemie sterowania, gdyż można je dokonywać przez wymianę całych urządzeń i modułów oprogramowania. W zależności od przyjętej topologii kasetach można umieszczać jeden lub kilka modułów komunikacyjnych. Przykład topologii systemu sterowania jest przedstawiony z wykorzystaniem modułów sprzętowych i programowych firmy Allen-Bradley.

58
W systemie tego rodzaju wyróżnia się trzy główne poziomy sieci:
1. Sieć informacyjna, która: zapewnia połączenia systemu wspomagania zarządzania przedsiębiorstwem z systemami wytwarzania, łączy komputery nadrzędne różnych typów procesów wytwarzania, posiada przepustowość, która pozwala na przesyłanie dużej ilości informacji, zapewnia standardowa obsługą sieci. 2. Sieć sterowania, która umożliwia pracę w czasie rzeczywistym, jest niezawodna, zapewnia komunikacje typu partnerskiego, łączy procesor programowalny z urządzeniami, pulpitami operatorskimi, komputerami PC itp., zapewnia możliwość programowania i konfiguracji urządzeń. 3. Sieć do obsługi urządzeń obiektowych, która: redukuje koszty okablowania, ponieważ urządzenie nie musi być bezpośrednio połączone kablami z procesorem, zapewnia diagnostykę na poziomie urządzeń obiektowych, łączy urządzenia, pochodzące od różnych wytwórców.

59
Głównym modułem systemu sterowania jest moduł ControlLogix
Głównym modułem systemu sterowania jest moduł ControlLogix. W jednej kasecie systemu ControlLogix można umieścić jeden lub kilka procesorów Logix5550. Jeden procesor może obsługiwać maksymalnie wejść i wyjść cyfrowych oraz 4000 wejść analogowych. Może kontrolować zarówno wejścia i wyjścia lokalne jak i zdalne za pośrednictwem sieci ControlNet, DeviceNet i Universal Remote I/O. W skład przykładowego systemu wchodzą również prostsze sterowniki PLC: typu SLC 500, opisywany poprzednio, oraz jeszcze prostszy typu MicroLogix. System sterowania ControlLogix jest systemem opartym na modelu “klient-serwer”, który wykorzystuje komponenty systemu ControlLogix oraz sieć ControlNet.

60
Sprzężenie prezentowanego sytemu sterowania z systemem wspomagania zarządzania przedsiębiorstwem zachodzi za pośrednictwem sieci Ethernet przy wykorzystaniu protokołu TCP/IP. Jest to otwarta sieć służąca do szybkiej wymiany informacji. Duża szybkość transmisji (10Mbps i 100Mbps) umożliwia szybką komunikacje wielu komputerów, sterowników i innych urządzeń na duże odległości. Sieć ControlNet jest szybką siecią otwartą wykorzystywaną do transmisji informacji systemu, pracującego w czasie rzeczywistym. Z kolei sieć DeviceNet jest otwartą siecią komunikacyjną, która pozwala na przyłączenie prostych urządzeń przemysłowych , takich jak czujniki i urządzenia wykonawcze ze sterownikami wysokiego poziomu. Pozostałe wyszczególnione na rysunku rodzaje sieci mają również znaczenie lokalne.

61
6.1.4. Programowanie sterowników PLC
Pierwotnie sterowniki PLC były programowane z wykorzystaniem wykresów drabinkowych, których szczeble stanowią m.in. graficzne reprezentacje styków i cewek przekaźników oraz innych elementów takich jak liczniki. Istotna wadą programów, bazujących na wykresach drabinkowych, był brak unifikacji i trudności w przenoszeniu ich na inne platformy sprzętowe. Obecnie większość inżynierów nie musi odnosić programu do schematów przekaźnikowych gdyż jest obeznana dobrze, a na dodatek przyzwyczajona, do środowiska Windows firmy Microsoft oraz do oprogramowania pracującego w tym środowisku, takiego jak Visual Basic, Visual C++. Środowisko to umożliwia zastosowanie doskonalszych metod programowania sterowników PLC niż wykresy drabinkowe. Potrzeba przenoszenia oprogramowania pomiędzy różnymi platformami sprzętowymi pociąga za sobą rozwój oprogramowania, w tym stosowanie systemów otwartych. Tworzenie tych systemów prowadzi do standaryzacji danych, struktur interfejsów, platform itp.

62
Standard IEC 61131 dotyczy sterowników programowanych, zaś część IEC dotyczy oprogramowania tych sterowników. Standard IEC na początku określa elementy oprogramowania, takie jak: dane, zmienne, konfiguracja, zasoby, zadania, moduły programowe. Wprawdzie dopuszczone jest stosowanie elementów definiowanych przez użytkownika, jednak wykorzystywanie powszechnie stosowanych elementów programowania zmniejsza możliwość powstawania błędów. Druga część wspomnianego standardu dotyczy języków oprogramowania.

63
Jednym z pięciu standardowych języków jest sekwencyjny blokowy schemat funkcyjny programu (sequential function charts), jednak w rzeczywistości jest to metoda logicznej organizacji programu. Dwa ze standardowych języków są językami tekstowymi, zaś dwa pozostałe są językami graficznymi. Programy tekstowe stanowią listę instrukcji zbliżonych do assemblera oraz strukturalizowany tekst zbliżony do Pascala. Języki graficzne stanowią wykres drabinkowy oraz funkcyjny wykres blokowy, który jest wykresem odpowiadającym schematowi obwodów. Standard dopuszcza bloki napisane przez użytkownika w języku C, przedstawione w postaci wykresu drabinkowego, strukturalnego tekstu oraz list instrukcji. Takie bloki mogą być zapamiętywane i używane jako bloki różnych programów, co czyni je silnym narzędziem.

64
6.2. URZĄDZENIA KONTROLNO-POMIAROWE Z MIKROKONTROLERAMI
Przykładem urządzenia, sterowanego mikrokontrolerem może być cyfrowy regulator temperatury. Ze względu na mało ciekawą architekturę regulatora zostanie jako przykład urządzenia z pojedynczym mikrokontrolerem omówiony wielokanałowy blok do pomiarów temperatury w kalibratorze czujników termometrycznych, aczkolwiek blok ten właściwie musi pracować w większym systemie, gdyż nie jest wyposażony w wyświetlacz.

66
Każdy z sześciu niskonapięciowych izolowanych kanałów służących do pomiaru sygnałów z kalibrowanych czujników oraz pomiaru sygnału z czujnika wzorcowego, składa się z filtru (F), wzmacniacza (W), izolatora analogowego (ISO), buforu (B) oraz kluczy analogowych. Kanały pomiarowe wyposażono w układ auto-zera, kompensacji rezystancji przewodów pomiarowych i przełączane wzmocnienie. Napięcie z wybranego kanału przekazywane jest do 18-bitowego przetwornika analogowo-cyfrowego (ADC), zbudowanego na bazie układu MAX-132. Sterowaniem kluczami wejściowymi, wzmocnieniem oraz komunikacją z komputerem nadrzędnym steruje mikroprocesor 8032 (P). Dane kalibracyjne kanałów przechowywane są w pamięci ST 93C557 (EEPROM). Zasilanie pamięci danych jest buforowane akumulatorem NiCd. Przełączaniem zasilania pamięci RAM oraz generowaniem sygnału RESET przy zaniku zasilania steruje układ MAX-691. Do transmisji z komputerem PC wykorzystano scalony nadajnik/odbiornik RS485 - MAX1480. W pamięci programu - EPROM, poza programami obsługi pomiarów i sterowania kanałami oraz obsługi transmisji, umieszczone są charakterystyki wszystkich mierzonych czujników. Dzięki temu do komputera przesyłane są gotowe wyniki pomiarów temperatury, kolejno dla wszystkich mierzonych kanałów.
. Zasilanie pamięci danych jest buforowane akumulatorem NiCd. Przełączaniem zasilania pamięci RAM oraz generowaniem sygnału RESET przy zaniku zasilania steruje układ MAX-691. Do transmisji z komputerem PC wykorzystano scalony nadajnik/odbiornik RS485 - MAX1480. W pamięci programu - EPROM, poza programami obsługi pomiarów i sterowania kanałami oraz obsługi transmisji, umieszczone są charakterystyki wszystkich mierzonych czujników. Dzięki temu do komputera przesyłane są gotowe wyniki pomiarów temperatury, kolejno dla wszystkich mierzonych kanałów.")
67
Oprogramowanie wielokanałowego systemu pomiarów temperatury składa się z następujących bloków:
bloku sterującego wymianą informacji z komputerem nadrzędnym, bloku sterującego pomiarem, bloku obliczeniowego.

68
Blok sterujący wymianą informacji z komputerem nadrzędnym steruje szeregową transmisją danych z komputera i do komputera oraz analizuje i przetwarza komunikaty. Transmisja danych odbywa się poprzez interfejs RS-485 zgodnie z protokołem MODBUS. Z komputera można przesłać: Plik kalibracyjny - zawiera on poprawki wzmocnienia i zerowania dla każdego z 6 kanałów pomiaru temperatury oraz kanału pomiaru temperatury przyłącza (3 wzmocnienia i 3 zerowania na każdym kanale pomiaru temperatury i 1 wzmocnienie i 1 zerowanie dla kanału pomiaru temperatury przyłącza). Dane te są zapamiętywane w pamięci EEPROM i używane podczas obliczania wyników pomiarów. Plik konfiguracyjny - zawiera on informację o tym który kanał jest aktywny i jakiego typu czujnik jest przyłączony do aktywnego kanału. Pytanie o temperaturę zmierzoną przez poszczególne czujniki w aktywnych kanałach
. Dane te są zapamiętywane w pamięci EEPROM i używane podczas obliczania wyników pomiarów. Plik konfiguracyjny - zawiera on informację o tym który kanał jest aktywny i jakiego typu czujnik jest przyłączony do aktywnego kanału. Pytanie o temperaturę zmierzoną przez poszczególne czujniki w aktywnych kanałach.")
69
Cykl pomiarowy wielokanałowego precyzyjnego modułu pomiarów temperatury w danym kanale można podzielić na 4 fazy. W pierwszej fazie na podstawie danych z pliku konfiguracyjnego poszukiwany jest kolejny aktywny kanał oraz dekodowany jest czujnik przypisany do tego kanału. Na tej podstawie przełączane jest wzmocnienie kanału oraz podawany adres tego kanału do przełącznika kanałów. Następujący po tym okres czasu o długości 40ms jest przeznaczony na ustalanie się napięcia na wejściu przetwornika analogowo-cyfrowego. W drugiej fazie cyklu pomiarowego wysyłany jest komunikat do przetwornika analogowo-cyfrowego, powodujący start przetwarzania. Przetwarzanie trwa ok. 60ms.

70
W trzeciej fazie sprawdzany jest stan przetwornika analogowo-cyfrowego
W trzeciej fazie sprawdzany jest stan przetwornika analogowo-cyfrowego. Jeżeli przetwornik zakończył pomiar pobierany jest wynik oraz dane o przebiegu przetwarzania (status przetwornika). Wynik przekształcany jest do standardowej postaci typu “long” i zapisywany w tablicy wyników. Następnie czujnik odłączany jest od wejścia kanału a wejście jest zwierane. Przez następne 40ms trwa ustalanie się napięcia na wejściu przetwornika. W czwartej fazie wykonywany jest pomiar zwartego wejścia, a po zakończeniu przetwarzania, podobnie jak w poprzedniej fazie odczytuje się wynik i umieszcza w tablicy zerowań. Po fazie tej następuje faza pierwsza pomiaru następnego kanału pomiarowego. W ostatnim kanale (kanał 7) mierzona jest temperatura przyłącza. Po wykonaniu tego pomiaru tablice wyników i zerowań przepisywane są do tablic buforowych, z których korzysta blok programów obliczeniowych. Po przepisaniu ustawiana jest flaga końca cyklu pomiarowego.
. Wynik przekształcany jest do standardowej postaci typu long i zapisywany w tablicy wyników. Następnie czujnik odłączany jest od wejścia kanału a wejście jest zwierane. Przez następne 40ms trwa ustalanie się napięcia na wejściu przetwornika. W czwartej fazie wykonywany jest pomiar zwartego wejścia, a po zakończeniu przetwarzania, podobnie jak w poprzedniej fazie odczytuje się wynik i umieszcza w tablicy zerowań. Po fazie tej następuje faza pierwsza pomiaru następnego kanału pomiarowego. W ostatnim kanale (kanał 7) mierzona jest temperatura przyłącza. Po wykonaniu tego pomiaru tablice wyników i zerowań przepisywane są do tablic buforowych, z których korzysta blok programów obliczeniowych. Po przepisaniu ustawiana jest flaga końca cyklu pomiarowego.")
71
Bloki sterujące transmisją i pomiarami napisane są w asemblerze.
Blok obliczeniowy napisany jest w języku C. Przelicza on zmierzone napięcia na wartości temperatury w poszczególnych kanałach oraz przygotowuje komunikat do wysłania do komputera.

72
6.3. SYSTEMY Z WBUDOWANYMI KOMPUTERAMI
Rozwój komputerów osobistych stworzył pewien standard pod względem architektury sprzętowej. Ponadto w środowisku tych komputerów może pracować bardzo wiele narzędzi programowania. Wyposażenie ich w karty sprzężenia z obiektami oraz przemysłowe wykonania ich obudów pozwala również stosować te komputery w przemyśle. Dostosowywanie tych komputerów do celów przemysłowych poszło jeszcze dalej - komputery osobiste zostały wbudowane w urządzenia, np. w bankomaty. Wraz z rozwojem mikrokomputerów wbudowanych, opartych na architekturze PC, powstało kilka standardów, między innymi standard PC/104, przyjęty przez ISO i ANSI. Ponadto powstały systemy operacyjne czasu rzeczywistego, przeznaczone do tych komputerów. Należą do nich OS-9, OS-9000, QNX, HP-RT, iRTMX, VRTX, Windows CE.

73
W zakładach przemysłowych często zachodzi potrzeba stworzenia kompleksowego systemu sterowania, który najlepiej jest zrealizować stosując strukturę hierarchiczną. Jedną ze typowych struktur jest struktura o następujących poziomach: poziom sterowania operatorskiego, poziom sterowania technologicznego, poziom obiektowy. Na poziomie sterowania operatorskiego zachodzi konieczność monitorowania przebiegu procesu, często następuje również programowanie parametrów procesu i zbieranie danych, charakteryzujących przebieg procesu. Poziom sterowania technologicznego obejmuje na ogół regulacje, realizację sekwencji procesu technologicznego, blokady, związane ze stanem procesu i urządzeń oraz nadzór nad stanami alarmowymi. Poziom obiektowy dotyczy bezpośredniego sterowania elementami wykonawczymi takimi jak silniki, grzejniki, zawory, oraz pomiaru zmiennych procesu przy pomocy takich elementów i urządzeń jak czujniki położenia, przetwornikami pomiaru ciśnienia i temperatury.

74
System z mikrokomputerem wbudowanym

75
W urządzeniach przemysłowych mikrokomputery wbudowane znajdują najczęściej zastosowanie na określonym powyżej poziomie technologicznym. W związku z tym mikrokomputery te mają na ogół następujące cechy: oprogramowanie przeznaczone do pełnienia określonych funkcji, nie zawiera monitora i klawiatury, musi cechować się dużą niezawodnością, realizować zadania w ściśle określonym czasie, co sprowadza się do zastosowania w nim systemu operacyjnego czasu rzeczywistego. Przykładem systemu z wbudowanym mikrokomputerem może być moduł układu regulacji firmy National Instruments typu PXI-8170/850 RT. Zawiera on procesor Intel Pentium III/800 MHz, twardy dysk 10 GHz, 256 MB pamięci RAM oraz interfejs z siecią Ethernet. Ponadto wyposażony jest on w system operacyjny czasu rzeczywistego.

76
Z kolei na bazie modułów komputerów wbudowanych firmy Advantech zbudowano między innymi następujące urządzenia: bankomat, interaktywny multimedialny sterownik z ekranem dotykowym, sterownik procesu, laserowy miernik prędkości, stanowisko informacyjne, np. dla podróżnych, urządzenie do odczytu linii papilarnych, przeznaczone do otwierania drzwi upoważnionym osobom.

77
6.4. SYSTEMY NA BAZIE KOMPUTERA KLASY PC
Informacje na temat wykonania przemysłowego komputera klasy PC może być nieco myląca. Np. komputery takie oferowane, przynajmniej do niedawna, przez amerykańsko-tajwańską firmę Advantech mają silną konstrukcję mechaniczną, przeznaczoną do zabudowy panelowej lub przytwierdzenia do ściany, zawierającą amortyzatory i filtry powierza. Odporność tego komputera na zakłócenia sieci zasilającej jest jednak niewielka. Nie potwierdziły się również nadzieje, dotyczące znacząco wyższej niezawodności układów elektronicznych. Niemniej komputery takie chronione filtrami sieciowymi i urządzeniami buforowego zasilania (UPS) mogą pracować w warunkach przemysłowych.
 mogą pracować w warunkach przemysłowych.")
78
Generalnie komputer osobisty nie został przewidziany do pracy związanej ze sterowaniem urządzeń przemysłowych oraz budowy przemysłowych systemów pomiarowych. Dotyczy to zarówno sprzętu jak i oprogramowania, które są przewidziane raczej do prac biurowych i dla hobbistów internetowych. Niemniej może on być wykorzystywany do sterowania urządzeń pomiarowych, których zawieszenie pracy lub niewielkie opóźnienia pracy, związane z obsługą równoległych programów, nie stanowi zagrożenia ani nie przynosi istotnych strat materialnych. Do takich systemów pomiarowych należą np.: kalibracja czujników termometrycznych, badania właściwości materiałów przez wyznaczanie charakterystycznych punktów przemian fazowych metoda analizy obrazu, badania reakcyjności koksu. Pomiary te można powtarzać, zaś próbki poddawane procesom nie są kosztowne. Jeżeli zachodzi potrzeba zastosowania komputerów klasy PC do bardziej odpowiedzialnych zadań w przemyśle, raczej wskazane jest zastosowanie systemu operacyjnego czasu rzeczywistego, np. systemu Windows CE lub QNX.

79
Zestaw kart do komputera obejmuje zarówno kartę z mikroprocesorem jak i bogatą rodzinę kart wejść i wyjść. Zaletą karty z mikroprocesorem, wtykanej w gniazdo na pasywnej płycie głównej pozwala na szybką jej wymianę w przypadku awarii. Pozostałe karty można podzielić na grupy, do których należą: wejścia cyfrowe o poziomie TTL i przekaźnikowe, wyjścia cyfrowe o poziomie TTL i przekaźnikowe, wejścia analogowe o poziomie woltowym, wzmacniacze wejściowe nieizolowane i izolowane, wielokanałowe przetworniki analogowo-cyfrowe o programowanych wzmocnieniach, pamięci operacyjne, interfejsy szeregowe.

80
Przykładem kart PCI firmy Advantech, mogą być karty wyszczególnione poniżej:

81
Jednym z rozwinięć standardu szyny PCI, a dokładniej standardu CompactPCI, jest dla celów automatyki i pomiarów specyfikacja PXI, opracowana przez firmę National Instruments. Wprowadza ona dodatkowe połączenia między pakietami, które ułatwiają współdziałanie tych pakietów w czasie rzeczywistym. Dodatkowymi szynami przesyłane są zarówno sygnały synchronizujące i wyzwalające jak i sygnały cyfrowe i analogowe. Karty do celów kontrolno-pomiarowych National Instruments standardu PXI

82
Zestaw PXI z monitorem ekranowym
Moduł procesora i pomiarowy systemu PXI

83
6.5 SYSTEMY ROZPROSZONE System zawierający moduły ADAM-4000 firmy Advantech jest, w odróżnieniu od systemów dotychczasowych, systemem rozproszonym. Niewielkie moduły pomiarowe ADAM-4000 umieszczone są bezpośrednio przy czujnikach, zaś z komputerem nadrzędnym są połączone za pośrednictwem izolowanego interfejsu RS-485 pozwala na szeregowe połączenie urządzeń wyposażonych w adresy. Ze względu na to, że w systemie znajduje się moduł przetwornika RS-232/RS-485, system ten może być przyłączony do komputera o architekturze PC z wyjściem szeregowym RS-232. Sieć z zastosowaniem modułów ADAM-4000, przedstawia rysunek

84
Schemat systemu z modułami ADAM 4000

85
System ADAM (Analog Digital Acquisition Module) zawiera szereg modułów, które stanowią m.in.:
Wejście pomiaru temperatury, Przetwornik A/C napięcia lub prądu, Przetwornik A/C rezystancji, Przetwornik A/C naprężeń, Przetwornik C/A z wyjściem napięcia lub prądu, Izolowany moduł wejść cyfrowych, Przekaźnikowy moduł wejściowy, Moduł licznika i pomiaru częstotliwości.

87
Fizyczne połączenie pomiędzy modułami a komputerem stanowią przewód dwużyłowy. Maksymalna odległość modułu od komputera wynosi 1200 metrów. Można ją wydłużyć stosując ADAM-4510 (repeater) o następne wielokrotności 1200 metrów, maksymalnie do 16 km. Wszystkie ADAM'y są połączone w sieć. Każdy ma swój własny, programowalny i przechowywany w pamięci EEPROM adres, który go identyfikuje przy odpytywaniu przez komputer zarządzający. Wszystkie moduły fizycznie są dołączone równolegle do tej samej pary przewodów. Komputer jest jednostką nadrzędną w sieci. Moduły monitorują sieć i odpowiadają, gdy w rozkazie przesyłanym z komputera pojawia się ich własny adres. Transmisja do i z komputera odbywa się z maksymalną prędkością bitów/s. Moduły ADAM mogą być zasilane z dowolnego źródła napięcia niestabilizowanego z zakresu 10 do 30V.
 o następne wielokrotności 1200 metrów, maksymalnie do 16 km. Wszystkie ADAM y są połączone w sieć. Każdy ma swój własny, programowalny i przechowywany w pamięci EEPROM adres, który go identyfikuje przy odpytywaniu przez komputer zarządzający. Wszystkie moduły fizycznie są dołączone równolegle do tej samej pary przewodów. Komputer jest jednostką nadrzędną w sieci. Moduły monitorują sieć i odpowiadają, gdy w rozkazie przesyłanym z komputera pojawia się ich własny adres. Transmisja do i z komputera odbywa się z maksymalną prędkością bitów/s. Moduły ADAM mogą być zasilane z dowolnego źródła napięcia niestabilizowanego z zakresu 10 do 30V.")
88
Obsługa programowa modułów ADAM 4000 z poziomu języka C, BASICa i Pascala polega na sekwencyjnym wysyłaniu komend i odczytywaniu odpowiedzi z portu szeregowego komputera. Komendy mają formę ciągów znaków ASCII. Moduły ADAM 4000 przeznaczone są głównie do zastosowań przemysłowych i laboratoryjnych, wszędzie tam gdzie potrzebna jest zdalna kontrola i monitorowanie wielkości fizycznych. Doskonale nadają się do sterowania klimatyzacją, monitorowania temperatury i mocy. Można je zastosować w systemach alarmowych i nadzorujących. Jedna z firm zastosowała je na stacjach benzynowych do zbierania informacji z dystrybutorów paliw. Duży producent półprzewodników na Tajwanie stosuje moduły do kontroli parametrów układów scalonych.

89
Nowszą generację modułów rozproszonych stanowi system ADAM 5000, zgodny ze standardem IEC System ADAM-5000 zawiera między innymi sterownik 5510 z 4 gniazdami na moduły kontrolno-pomiarowe.

90
Sam sterownik może obsługiwać do 64 punktów wejść/wyść
Sam sterownik może obsługiwać do 64 punktów wejść/wyść. Kasety sterowników są łączone w sieć za pośrednictwem RS-485. Dostępne są następujące moduły akwizycyjne, dostosowane do interfejsu RS-485: ADAM moduł 3 wejść temperaturowycch Pt100 ADAM moduł 8 wejść analoogowych, ADAM-5017H - moduł 8 szybkich wejść analogowych (8kHz), ADAM moduł 7 wejść termoparowych, ADAM mooduł 7 wyjść analogowych, ADAM moduł 16 wejść wyjść dwustanowych, ADAM moduł 8 wyjść przekaźnikowych.
, ADAM moduł 7 wejść termoparowych, ADAM mooduł 7 wyjść analogowych, ADAM moduł 16 wejść wyjść dwustanowych, ADAM moduł 8 wyjść przekaźnikowych.")
91
Sterownik zawiera mikroprocesor i ma wbudowany system operacyjny DOS v Może być programowany w języku C lub innym języku dostosowanym do mikroprocesorów rodziny INTEL x86. Dostępne jest również programowanie: w języku drabinkowym. (RLL Relay Ladder Logic), za pomocą diagramów bloków funkcyjnych (FDB - Function Clock Diagrams), za pomocą sekwencyjnej sieci działań (SFC- Sequential Fuction Charts). Program przed załadowaniem do sterownika może być przetestowany za pomocą wbudowanego symulatora. Oprócz standardowych bloków funkcyjnych, takich jak licznik i PID, użytkownik może zdefiniować swoje własne bloki funkcyjne. Definicja działania takiego bloku odbywa się za pośrednictwem języka C.
, za pomocą diagramów bloków funkcyjnych (FDB - Function Clock Diagrams), za pomocą sekwencyjnej sieci działań (SFC- Sequential Fuction Charts). Program przed załadowaniem do sterownika może być przetestowany za pomocą wbudowanego symulatora. Oprócz standardowych bloków funkcyjnych, takich jak licznik i PID, użytkownik może zdefiniować swoje własne bloki funkcyjne. Definicja działania takiego bloku odbywa się za pośrednictwem języka C.")
92
ADAM-5510 zapewnia optoizolację zasilania oraz wejść i wyjść na poziomie 3kV. System jest zasilany napięciem stałym o wartości 10-30V. Zamontowany może być na szynie DIN jak również w panelu. Prezentowane sterowniki można łączyć w sieć za pośrednictwem interfejsu RS-485 z wykorzystaniem protokołu MODBUS. Modem radiowy ADAM-4550, wywodzący się z serii ADAM-4000, ma prędkość transmisji 1Mb/s, moc 100mV i programowo konfigurowany adres, wybierany z 16 tys. możliwości. Pasmo częstotliwości pracy wynosi 2.45 GHz.

93
Schemat systemu z modułami ADAM 5000

94
Przykładem modułu automatyki, komunikującego się za pośrednictwem sieci Ethernet jest moduł ADAM-5000/TCP. Wykorzystany jest w nim protokoł Modbus/TCP.

95
Moduł ADAM-5000/TCP jest sterowany przez mikroprocesor 32-bitowy
Moduł ADAM-5000/TCP jest sterowany przez mikroprocesor 32-bitowy. Protokoł MODBUS/TCP ułatwia integrację z innymi blokami systemu sterowania. Umożliwia komunikację do 100m bez repeatera. Może być zdalnie konfigurowany za pośrednictwem sieci Ethernet. Pozwala na przyłączenie innych modułów za pomocą 8 gniazd. W efekcie pozwala na monitorowanie 128 punktów pomiarowych. Wcześniej opracowany system ADAM-4000 także można włączyć w sieć Ethernet stosując moduły sprzęgające z interfejsami RS/232/422/485.

96
Przykładem panelu operatorskiego, sprzęgniętego z systemem zbierania danych i sterowania jest moduł WebOIT-100. Wyposażony on jest w ekran dotykowy oraz oprogramowanie graficzne z animacją, umożliwiający monitorowanie procesu i alarmów oraz wyświetlanie menu technologicznego i raportów.

97
Systemy tego rodzaju wyposażone są w odpowiednie narzędzie programistyczne, jak np. A-Studio.

98
6.6. OPROGRAMOWANIE SYSTEMÓW NA BAZIE KOMPUTERA KLASY PC
Wspomniane w poprzednim paragrafie oprogramowanie systemów oferowanych przez firmę Advantech przy użyciu pakietu narzędziowego A-Studio umożliwia łatwą komunikację z operatorem, zapewniając automatyczne, półautomatyczne i ręczne sterowanie procesem oraz dostarczając niezbędnych informacji o przebiegu procesu. Biblioteki specjalistycznych elementów graficznych w tego rodzaju oprogramowaniu zapewnia szybkie tworzenie odpowiednich aplikacji.

100
Firma amerykańska National Instruments sprzedaje między innymi oprogramowanie do tworzenia oprogramowania do celów pomiarowo-kontrolnych LabWiew, Measurement Studio oraz LabWindows/CVI. Biblioteki tych programów pozwalają na sprzęganie systemu z kartami modułami i urządzeniami kontrolno-pomiarowymi kilkudziesięciu ważniejszych firm światowych oraz bazami danych ODBC (Open Data Base Connectivity), takimi jak Microsoft Access, Microsoft SQL Server, Sybase SQL Server, Oracle. Oferują między innymi oprogramowanie do celów regulacji typu PID i Fuzzy Logic. Umożliwiają też matematyczną obróbkę sygnałów, w tym szybką transformatę Fouriera oraz filtracje cyfrową przy użyciu filtrów o skończonej i nieskończonej odpowiedzi impulsowej.
, takimi jak Microsoft Access, Microsoft SQL Server, Sybase SQL Server, Oracle. Oferują między innymi oprogramowanie do celów regulacji typu PID i Fuzzy Logic. Umożliwiają też matematyczną obróbkę sygnałów, w tym szybką transformatę Fouriera oraz filtracje cyfrową przy użyciu filtrów o skończonej i nieskończonej odpowiedzi impulsowej.")
101
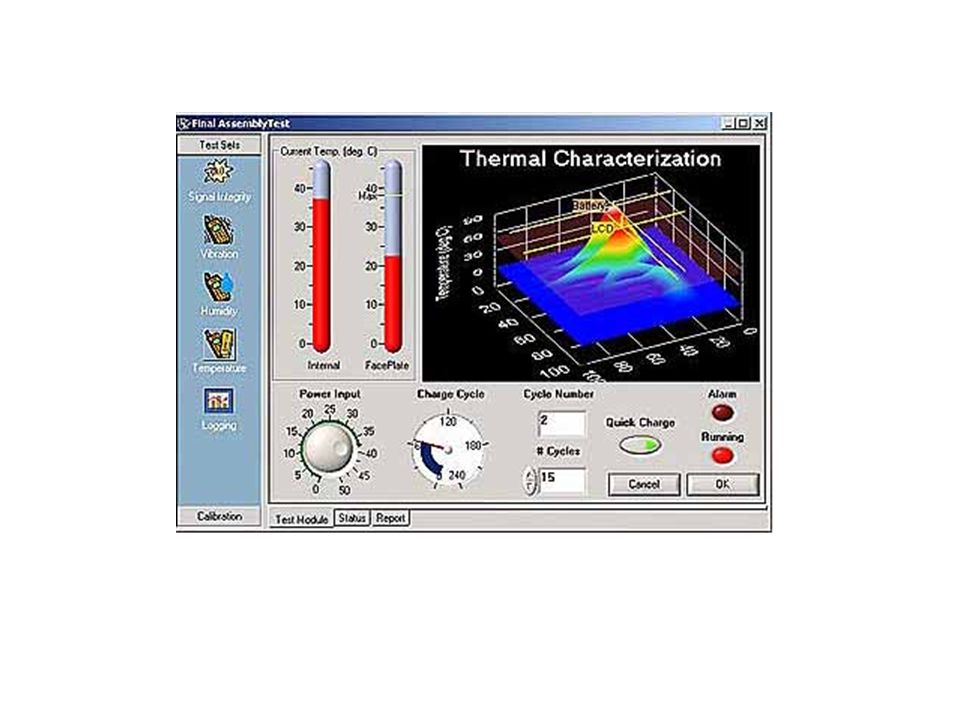
Przetwarzanie sygnału przez program LabWiew

102
Biblioteka pakietu LabWindows, który jest częścią pakietu Measurement Studio firmy National Instruments, umożliwia przetwarzanie sygnałów w następujących dziedzinach: Cyfrowe przetwarzanie sygnałów DSP, w tym określanie widma amplitudowego i fazowego, analiza harmoniczna oraz określanie odpowiedzi impulsowej i transmitancji, Generacja sygnałów, w tym gaussowskiego szumu białego, przebiegów impulsowych, piłowych, sinusoidalnych, prostokątnych itp. Analiza z użyciem okien np. Blackmana, Hamminga, Hanninga, Filtracja z użyciem m.in. filtrów Bessela, Czebyszewa, filtrów kaskadowych, filtrów o skończonej i nieskończonej odpowiedzi impulsowej itp.

103
7. PODZIAŁ SYSTEMU NA BLOKI FUNKCJONALNE
System MIKROSTER może służyć jako podstawa do omówienia zagadnień, specyficznych dla zastosowania komputerów w przemyśle. Na bazie elementów systemu MIKROSTER został opracowany np. system sterowania stanowiskiem do dyfuzji półprzewodników. Pozwalał on w sposób programowy sterować wieloetapowym procesem technologicznym. Do zadań systemu należało: programowanie wieloetapowej sekwencji technologicznej, sterowanie urządzeniem załadowczo-wyładowczym, sekwencyjnie sterowanie programowym przepływem kilku gazów, regulacja temperatury obrabianego wsadu, który obejmowała do 10 powiązanych ze sobą pętli, monitorowanie procesu technologicznego i przyjmowanie poleceń operatora, wykrywanie, monitorowanie i rejestracja stanów alarmowych, na polecenie operatora pełna rejestracja przebiegu procesu.

104
Zawierał on nadrzędny blok sterowania, sprzężony za pośrednictwem interfejsu szeregowego z blokiem regulatora. Taki podział wynikał między innymi ze względów: funkcjonalnych, użytkowych, niezawodnościowych, realizacyjnych, w tym przypadku związanych z wydajnością i dostępnym obszarem pamięci dla mikroprocesora 8-bitowego o częstotliwości pracy 10MHz. Problem ograniczeń sprzętu mikrokomputerowego został wkrótce wyeliminowany przez pojawienie się na rynku doskonalszych mikroprocesorów, pamięci i innych układów mikroprocesorowych, Pozostałe względy nadal są jednak istotne.

105
W systemie przemysłowym zachodzi konieczność zrealizowania szeregu zadań, które są stosunkowo słabo ze sobą powiązane. Takimi zadaniami jest np. sterowanie przepływem gazów i wielopętlowa regulacja temperatury. System nadzorujący przebieg programowanego procesu technologicznego komunikuje się z blokami systemu przez: wysłanie rozkazu załadunku lub wyładunku wsadu, wysłanie rozkazu o włączeniu odpowiedniego gazu o określonym przepływie, wysłanie rozkazu doprowadzenia do określonej temperatury wsadu z określoną prędkością, przyjęcia informacji o rzeczywistych stanach ładowarki oraz o rzeczywistych wartościach przepływu i temperatury, przyjęcie komunikatów o alarmach zgłoszonych przez bloki systemu, podejmowanie działań alarmowych.

106
Z regulatora do systemu nadzorującego przebieg procesu w cyklu sekundowym są przesyłane informacje o wartościach chwilowych temperatury i wartościach chwilowych mocy grzejnej. Informacje o pozostałych zmiennych wewnętrznych regulatora nie są istotne dla innych bloków systemu. Ze względu na rozbudowanie programu regulatora o 10, wzajemnie powiązanych pętlach regulacyjnych, oraz niewielki strumień informacji wymienianych z otoczeniem celowe jest wydzielenie tego bloku funkcjonalnego. Wydzielenie programowego bloku funkcjonalnego pozwala na łatwiejsze modyfikacje oprogramowania, aczkolwiek obecnie nie stanowi to istotnego problemu, gdyż są do dyspozycji systemy operacyjne, które pozwalają na niezależny przebieg wielu procesów czasu rzeczywistego np. QNX lub Windows CE. Istotniejsze może okazać się jest wydzielenie sprzętowego bloku funkcjonalnego. Pojawiają się tu bowiem problemy użytkowe i niezawodnościowe, należy przy tym uwzględnić powiązanie systemu sterowania ze środowiskiem, z zwłaszcza z licznymi czujnikami, elementami wykonawczymi i urządzeniami technologicznymi.

107
Dla przykładu typowe czujniki pomiaru temperatury przetwarzają temperaturę w napięcie stałe lub rezystancję, która z kolei jest odczytywana jako sygnał stałonapięciowy. Termoelementy Pt-PtRh10 maja czułość ok. 10V/C, zaś czujniki oporowe Pt100 czułość ok. 0.4/C, co przy prądzie pomiarowym 100A daje czułość ok. 40V/C. Są to sygnały słabe i warunkach przemysłowych zazwyczaj silnie zakłócone, tym silniej im dłuższa jest linia łącząca je ze wzmacniaczem lub przetwornikiem analogowo-cyfrowym. Ponadto termoelementy powinny być łączone z odbiornikiem poprzez specjalne przewody kompensacyjne, zaś czujniki oporowe liniami 4-przewodowymi. Przy większej liczbie czujników mogą powstawać problemy z poprowadzeniem i przyłączeniem odpowiedniej liczby przewodów. Może to stanowić wystarczający argument na wydzielenie wielokanałowego przetwornika analogowo-cyfrowego lub wielopętlowego regulatora jako oddzielny blok systemu, umiejscowiony blisko punktów pomiarowych. Sygnały informacyjne o wynikach pomiarów mogą być wówczas przesyłane do innych bloków systemu za pośrednictwem interfejsu np. interfejsu szeregowego RS-485 czy interfejsu pomiarowego IEEE 488.

108
Wydzielenie wielopętlowego regulatora temperatury z całości systemu ułatwia proces uruchomienia urządzenia, jego testowania i naprawy. Można bowiem przeprowadzać te operacje niezależnie od stanu pozostałej części systemu. Ważne jest to także ze względów niezawodnościowych. System mniejszy jest bowiem mniej awaryjny, chociażby ze względu na mniejszą liczbę elementów użytych do jego budowy. Gdyby system sterowania stanowił sprzętową całość, to niegroźna awaria bloku załadowczego mogłaby zablokować pracę tego systemu i doprowadzić na przykład do spalenia się kosztownej aparatury lub zniszczenia kosztownego wsadu. Przykładem podzielenia systemu na niezależne bloki z przyczyn zarówno użytkowych i niezawodnościowych może być kalibrator użytkowych czujników temperatury.

109
Struktura systemu SKCT-99 do automatycznej kalibracji użytkowych czujników temperatury

110
Innym przykładem wyboru struktury może być układ sterowania urządzenia do syntezy i polikrystalizacji fosforku indu. Jest to obecnie bardzo ważny materiał półprzewodnikowy, używany do wytwarzania bardzo szybkich elementów elektronicznych, np. układów scalonych do transmisji danych z szybkością 40Gb/s oraz diod i laserów. Istotnym procesem w technologii wytwarzania monokryształów InP jest synteza tego materiału. W jej wyniku otrzymuje się polikrystaliczny InP stanowiący wsad do procesu monokrystalizacji. Synteza InP polegająca na połączeniu w związek chemiczny indu z fosforem jest procesem bardzo trudnym i niebezpiecznym. Przeprowadza się ją w poziomej zaspawanej ampule kwarcowej, umieszczonej w poziomym piecu o kilkunastu strefach grzejnych. Piec jest zamknięty w komorze ciśnieniowej.

111
Urządzenie do omawianego celu składa się z dwustrefowego pieca, w który znajduje się reaktor.
W jednej, “niskiej” strefie ogrzewana jest do temperatury ponad 500C łódka z fosforem, w wyniku czego reaktor wypełnia się parą fosforu. W drugiej “wysokiej” strefie o temperaturze ok. 1100C znajduje się łódka z roztopionym indem. W trakcie etapu syntezy w łódce tej powstaje płynny fosforek indu. W następnym etapie procesu należy obniżać stopniowo temperaturę poszczególnych sekcji grzejnych pieca tak, aby stworzyć w “wysokiej” strefie reaktora wędrujący gradient temperatury, powodujący kierunkową krystalizację fosforku indu wzdłuż łódki.

112
Urządzenie do syntezy i polikrystalizacji fosforku indu: 1 – komora ciśnieniowa, 2 – izolacja pieca rurowego, 3 – wielosekcyjny grzejnik, 4 – reaktor w postaci zamkniętej ampuły kwarcowej, 5 – łódka z sublimującym fosforem, 6 – przegroda termiczna przepuszczająca pary fosforu, 7 – łódka z indem

113
Rozkład temperatury w reaktorze do syntezy i polikrystalizacji fosforku indu: przed polikrystalizacją (linia czerwona) i po polikrystalizacji (linia czarna).
 i po polikrystalizacji (linia czarna).")
114
Temperatura Krystalizacji
Rozkład temperatury w “wysokiej” strefie reaktora do syntezy i polikrystalizacji fosforku indu w poszczególnych fazach polikrystalizacji (pomiar w odstępach czasowych).
.")
115
Podstawowym problemem związanym z bezpieczeństwem procesu jest fakt występowania wysokiego ciśnienia par fosforu wewnątrz zamkniętego reaktora kwarcowego. Aby nie dopuścić do eksplozji tego reaktora lub jego implozji trzeba na jego zewnątrz utrzymywać nadciśnienie zbliżone do ciśnienia we wnętrzu. Różnica nie może przekraczać 0.1 MPa (1 atm.) ciśnienia wewnątrz reaktora. Wysoka temperatura i agresywność fosforu uniemożliwiają bezpośredni pomiar ciśnienia wewnątrz zaspawanego reaktora. O ciśnieniu tym decyduje temperatura strefy pieca o najniższej temperaturze, przy czym zależność ciśnienia od temperatury jest rosnąca wykładniczo i zmienia się w granicach od 0.7 Mpa (7 atm.) w temperaturze 500C do 3.1 MPa (31 atm.) w temperaturze 570C, a więc ok. 4.5 krotnie. W opisywanej sytuacji konieczne jest utrzymywanie odpowiedniego rozkładu temperatury w reaktorze, co wymusza wymaganie wielkiej niezawodności układu sterowania i pomiaru temperatury. Należy zaznaczyć, że piec z reaktorem są wprawdzie umieszczone w komorze ciśnieniowej, lecz fosfor w trakcie stygnięcia wydziela się w postaci fosforu białego, który jest nie tylko agresywny i trujący ale też bardzo palny w zetknięciu się z powietrzem. Ewentualna awaria, powodująca pęknięcie kwarcowego reaktora, grozi więc pożarem przy próbie opróżnienia komory ciśnieniowej. Jest to zwłaszcza niebezpieczne dlatego, że wewnątrz komory znajduje się kilka kilogramów fosforu.

116
Zrealizowana struktura układu regulacji

117
Z przyczyn bezpieczeństwa zdecydowano się między innymi na tradycyjne rozwiązanie z układu sterowania urządzeniem do syntezy fosforku indu z zastosowaniem kilkunastu regulatorów temperatury, sterowanych z komputera nadrzędnego. Zrezygnowano natomiast z dosyć atrakcyjnego konstrukcyjnie i cenowo zastosowania układu sterowania zbudowanego z kilku modułów FieldPoint firmy National Instruments, przedstawionego na rys. 29. Mocowanie tych modułów jest przedstawione na rysunku. Dwa moduły tego rodzaju mogą obsłużyć osiem pętli regulacyjnych temperatury. Dla wyjaśnienia przyczyn rezygnacji konieczne jest przedstawienie zagadnienia prowadzenia wspomnianej syntezy InP.

118
Proponowana wstępnie struktura regulatora układu grzejnego o wielu sekcjach

119
Sposób mocowania modułów FieldPoint

120
W efekcie przy zastosowaniu oddzielnych regulatorów ewentualne uszkodzenie pojedynczego czujnika temperatury lub regulatora którejś z kilkunastu sekcji grzejnych pozwala operatorowi na doprowadzenie procesu do bezpiecznego zakończenia. Złe efekty technologiczne są w tym przypadku zagadnieniem drugorzędnym. Natomiast w przypadku drugiej z przedstawionych wersji sterowania, awaria modułu, sterującego całościowo wielopętlowym systemem regulacji, wiązałaby się z utratą kontroli nad procesem i prawie pewnej eksplozji reaktora ze wszystkimi późniejszymi konsekwencjami.

Podobne prezentacje


>")



 - zasilających - sterujących - wykrywających zagrożenia (ostrzegawczych->")













