Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Podstawowe układy cyfrowe
Spis treści Układy cyfrowe Podstawowe układy cyfrowe

2
Układy cyfrowe Działanie układów cyfrowych oparte jest na wykorzystaniu dwóch stanów niskiego (L-low) i wysokiego (H-high). Duża część tej informacji to liczby, stąd przyjęło się nazywać te stany jedynką i zerem. Możemy więc stwierdzić że wszelka infor. W komp. Musi występować w postaci 0 i 1- binarnej. Przy użyciu tych stanów musimy przedstawić wszystkie rodzaje informacji występujących w układach cyfrowych.
 i wysokiego (H-high). Duża część tej informacji to liczby, stąd przyjęło się nazywać te stany jedynką i zerem. Możemy więc stwierdzić że wszelka infor. W komp. Musi występować w postaci 0 i 1- binarnej. Przy użyciu tych stanów musimy przedstawić wszystkie rodzaje informacji występujących w układach cyfrowych.")
3
W tym celu stosowane są odpowiednie
struktury: dwójkowy system liczbowy oraz kody - reprezentują informacje w układach cyfrowych. Więc potrzebne są reguły przekształcania różnych postaci informacji na inf. binarną. Proces przekształcania inf. jednego rodzaju postaci na inną postać nazywamy kodowaniem.

4
Def. Kodowaniem nazywamy przyporządkowanie poszczególnym obiektom zbioru kodowanego odpowiadających im elementów zwanych słowami kodowanymi, przy czym każdemu słowu kodowanemu musi odpowiadać dokładnie jeden element kodowany. Zbór (obiektów) elementów kodowanych Fakt Ze literze C odpowiadają dwa słowa kodowe nie przeszkadza w poprawnym przetwarzaniu inf. (choć stanowi pewne utrudnienie procesu Kodowania. Sytuacja odwrotna była by Niedopuszczalna, bo gdybyśmy uzyskali w procesie przetwarzania inf. słowo kodowe 001 to nie wiedzieli byśmy czy wynik odpowiada np. literze A czy B. Zbór słów kodowanych A reprezentowanie 111 001 B 010 C 100
 elementów. kodowanych. Fakt Ze literze C odpowiadają. dwa słowa kodowe nie przeszkadza. w poprawnym przetwarzaniu inf. (choć. stanowi pewne utrudnienie procesu. Kodowania. Sytuacja odwrotna była by. Niedopuszczalna, bo gdybyśmy uzyskali. w procesie przetwarzania inf. słowo. kodowe 001 to nie wiedzieli byśmy czy. wynik odpowiada np. literze A czy B. Zbór słów. kodowanych. A. reprezentowanie B C")
5
Sposoby określania kodu, czyli procesu kodowania może być różny
Sposoby określania kodu, czyli procesu kodowania może być różny. Może to być opis słowny (tekst) ciąg znaków, wzór, tabela przekodowująca lub każdy inny sposób zgodny z definicją. Informacja kodowana – postacie: Tekst (ciąg znaków) Polecenia do wykonania przez komputer (instrukcje dla procesora) Wartości logiczne czy też liczby
 ciąg znaków, wzór, tabela przekodowująca lub każdy inny sposób zgodny z definicją. Informacja kodowana – postacie: Tekst (ciąg znaków) Polecenia do wykonania przez komputer (instrukcje dla procesora) Wartości logiczne czy też liczby.")
6
Def. Kodem liczbowym nazywamy taki kod, który liczbom dowolnego systemu będzie przyporządkowywał słowa kodowe w postaci zerojedynkowej. Naturalny Kod Binarny (NKB) Def. Jeżeli dowolnej liczbie dziesiętnej przyporządkujemy odpowiadającą jej liczbe binarną, to otrzymamy NKB np. 0000(bin)=0(dec), 0001=1 itd. Kod prosty (BCD) każdej cyfrze dziesiętnej przyporząd. cztero cyfrową liczbę dwójkową (tetradę)
 Def. Jeżeli dowolnej liczbie dziesiętnej przyporządkujemy odpowiadającą jej liczbe binarną, to otrzymamy NKB np. 0000(bin)=0(dec), 0001=1 itd. Kod prosty (BCD) każdej cyfrze dziesiętnej przyporząd. cztero cyfrową liczbę dwójkową (tetradę)")
7
2. Słowo kodowe w kodzie prostym BCD odpowiadającej danej liczbie otrzymujemy zapisując każdą cyfrę w postaci czwórki cyfr binarnych np. 463(dec)= (BCD) Kod ASCII (Amerykański standardowy kod dla wymiany informacji) Jest to kod służący do kodowania tekstów i przesyłania ich pomiędzy urządzeniami. Koduje on oprócz znaków alfa numerycznych tak zwane znaki sterujące do sterowania transmisją i pracą drukarki. Kod ten jest w postaci tabeli zawierającej kodowane obiekty i odpowiadające im słowa kodowane.
 Jest to kod służący do kodowania tekstów i przesyłania ich pomiędzy urządzeniami. Koduje on oprócz znaków alfa numerycznych tak zwane znaki sterujące do sterowania transmisją i pracą drukarki. Kod ten jest w postaci tabeli zawierającej kodowane obiekty i odpowiadające im słowa kodowane.")
8
Właściwe ASCII (techniczne) składa się z 128 znaków
Znaki w PC jak i większości komputerów zapisane są jednym Bajtem, co oznacza że może ich być aż 256. Właściwe ASCII (techniczne) składa się z 128 znaków od 0 do 127, a znaki od 128 do 255 nazywane są rozszerzonymi znakami ASCII, stanowią pewien Nieoficjalny standard, zwane znakami IBM (istnieją urządzenia nie obsługujące drugiej polówki) Zestaw znaków ASCII o kodach od 0 do 127 dzieli się na dwie części pierwsza o kodach od 0 do 32, druga od 32 do 127 są to litery i znaki przestankowe Od 0 do 32 znajdują się znaki sterujące, maja specjalne znaczenie, kiedy komp. porozumiewa się Z drukarką musi jej powiedzieć co i jak ma wydrukować (kiedy kończy się wiersz, a kiedy strona)
 składa się z 128 znaków. od 0 do 127, a znaki od 128 do 255 nazywane są. rozszerzonymi znakami ASCII, stanowią pewien. Nieoficjalny standard, zwane znakami IBM (istnieją. urządzenia nie obsługujące drugiej polówki) Zestaw znaków ASCII o kodach od 0 do 127 dzieli. się na dwie części pierwsza o kodach od 0 do 32, druga od 32 do 127 są to litery i znaki przestankowe. Od 0 do 32 znajdują się znaki sterujące, maja. specjalne znaczenie, kiedy komp. porozumiewa się. Z drukarką musi jej powiedzieć co i jak ma. wydrukować (kiedy kończy się wiersz, a kiedy strona)")
9
Pierwsze 32 kody nie są używane do przekazywania danych, zapewniają natomiast polecenia, sygnały kontrolne i sterujące.

10
Podstawowe układy cyfrowe
1. Bramki logiczne 2. Układy logiczne 3. Przerzutniki 4. Rejestry 5. Bramki trójstanowe 6. Magistrala 7. Jednostka arytmetyczno-logiczna (ALU) 8. Dekodery kodery piorytetu 9. liczniki
 8. Dekodery kodery piorytetu. 9. liczniki.")
11
Bramki logiczne W technice cyfrowej działania logiczne wykonywane są przez układy cyfrowe zwane bramkami, z których buduje się bardziej skomplikowane ukł. cyf. Zmienną logiczną nazywamy zmienną, która może przyjmować jedną z dwóch wartości logicznych: prawdę lub fałsz (1 lub 0)
")
12
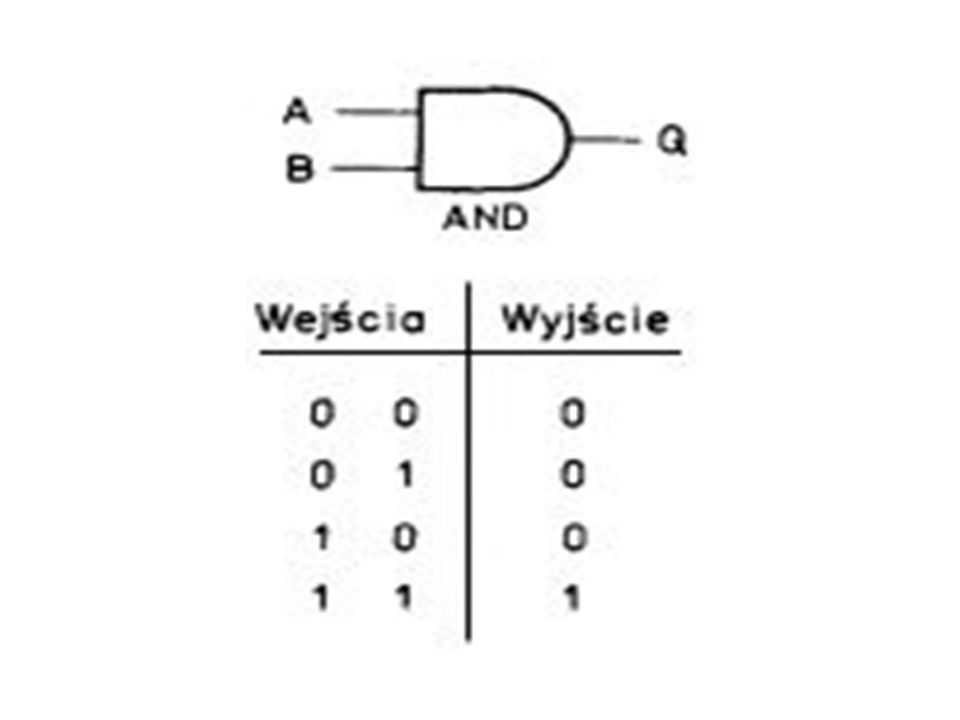
x1 x2 y 1 Iloczyn logiczny- bramka AND zapisujemy y=x1 x2 lub y=x1*x2
symbol: zależnie jaki sygnał podamy na x2 (1 to y=x1, to y=0) np.. sygnał x2 jest sygnałem sterującym tabela prawdy x1 & y x2 Przedstawia wszystkie możliwe kombinacje argumentów i odpowiadających im wartości logicznych w wyniku danego działania - mnożenia Prawda tylko gdy wszystkie arumęty równe są 1. x1 x2 y 1
 np.. sygnał x2 jest sygnałem sterującym. tabela prawdy. x1. & y. x2. Przedstawia wszystkie możliwe. kombinacje argumentów. i odpowiadających im wartości. logicznych w wyniku danego. działania - mnożenia. Prawda tylko gdy wszystkie arumęty. równe są 1. x1. x2. y. 1.")
14
x1 x2 y 1 Suma logiczna – bramka OR Zapisujemy y=x1 x2 lub y=x1+x2
Symbol: Tabela prawdy: x1 1 y x2 x1 x2 y 1 Tylko wtedy jest zero

15
y=~x (matematyczny) y= x (w ukł. cyf.) y=x# (zapis intela) symbol:
Negacja – bramka NOT zapis: y=~x (matematyczny) y= x (w ukł. cyf.) y=x# (zapis intela) symbol: Tabela prawdy: 1 X Y x y 1
 y= x (w ukł. cyf.) y=x# (zapis intela) symbol: Tabela prawdy: 1. X. Y. x. y. 1.")
16
Określenie negacji – jeśli wartość argumentu jest równa 0 (fałsz) to wynik otrzymamy 1(prawda), i na odwrót. Negacja działa zawsze na jeden argument. Ponieważ sygnały logiczne mogą być negowane na wej. i wyj. układu, przyjęto że operację negacji oznacza w symbolu bramki NOT kółeczko przy wej. lub wyj.

17
Funkcja NOT może być połączona z innymi funkcjami, tworząc NAND i NOR
Wkrótce zobaczymy, że są one bardziej popularne, niż AND i OR

18
Exclusive-OR Exclusive-OR (XOR, czyli WYŁĄCZNE LUB) jest ciekawą funkcją, chociaż mniej podstawową niż AND i OR. Wyjście bramki XOR jest w stanie wysokim, jeżeli jedno albo drugie wejście jest w stanie wysokim (jest to zawsze funkcja dwóch zmiennych). Mówiąc inaczej, wyjście jest w stanie wysokim, jeżeli stany wejść są różne.
. Mówiąc inaczej, wyjście jest w stanie wysokim, jeżeli stany wejść są różne..")
19
Podział układów logicznych
Układy kombinacyjne i sekwencyjne 2. Układy synchroniczne i asynchroniczne Układy sekwencyjne nazywamy ukł. cyfrowymi, w których stan wyjść zależy od stanu wejść oraz od poprzednich stanów układu.

20
Układem asynchronicznym nazywamy taki ukł
Układem asynchronicznym nazywamy taki ukł. dla którego w dowolnym momencie jego działania stan wejść oddziałuje na stan wyjść. Układen synchronicznym nazywamy taki ukł. cyf. dla którego stan wej. wpływa na stan wyj. jedynie w pewnych określonych odcinkach czasupracy ukł. zwanych czasem czynnym, natomiast w pozostałych odcinkach czasu zwanych czasem martwym, stan wej. nie wpływa na stan wyj.. Odcinki czasu czynnego i martwego wyznaczane są przez podanie specjalnego przebiegu zwanego przebiegiem zegarowym lub taktującym na wejście zwane wej. zegarowym lub taktującym. cyfrowy przebieg zegarowy

21
Do tej pory zajmowaliśmy się układami kombinacyjnymi - to znaczy takimi, w których stan sygnałów wyjściowych zależy w każdej chwili wyłącznie od bieżącego stanu sygnałów wejściowych. Natomiast przerzutniki są elementami zaliczanymi do grupy układów sekwencyjnych. W układach sekwencyjnych stan na wyjściu układu jest funkcją nie tylko bieżących stanów wejściowych, ale również stanów na wyjściu układu w poprzednich chwilach czasowych. W układach tych oprócz elementów logicznych (kombinacyjnych) występują elementy pamięciowe. W zależności od trybu pracy układy sekwencyjne możemy podzielić na asynchroniczne i synchroniczne.
 występują elementy pamięciowe. W zależności od trybu pracy układy sekwencyjne możemy podzielić na asynchroniczne i synchroniczne..")
22
Układ asynchroniczny zmienia swój stan wyjść bezpośrednio po zmianie stanu wejść.
W układach synchronicznych zmiana stanu wyjść odbywa się w chwilach wyznaczonych zmianą sygnału synchronizującego. Podstawowym elementem sekwencyjnym, który zapamiętuje jeden bit informacji jest układ nazywany przerzutnikiem. Przerzutnik jest układem o co najmniej dwóch wejściach i z reguły dwóch wyjściach. Większość przerzutników to przerzutniki synchroniczne. Wyjątek stanowi najprostszy przerzutnik nazywany asynchronicznym przerzutnikiem RS.

23
Wejścia mogą być: • zegarowe CK (ang. Clock), zwane inaczej synchronizującymi albo wyzwalającymi, • informacyjne, • programujące. Jeśli przerzutnik ma wejście synchronizujące, to jest nazywany przerzutnikiem synchronicznym, natomiast jeśli nie ma takiego wejścia-przerzutnikiem asynchronicznym. Przerzutnik synchroniczny reaguje na informację podawaną na wejścia informacyjne tylko w obecności impulsu zegarowego.

24
Przerzutnik może być wyposażony w dwa wejścia programujące: ustawiające S (ang. Set) i zerujące R (ang. Reset) nazywane również Preset i Clear. Wejścia programujące są zawsze wejściami asynchronicznymi (niezależne od sygnału zegarowego). Istnieje wiele typów przerzutników.Podstawowe to: RS, D i JK. Działanie logiczne przerzutników najczęściej obrazuje się za pomocą tablicy stanów, w której przedstawione są stany na wejściach informacyjnych układu oraz odpowiadające im stany na wyjściu(ach) układu. Wyjścia przerzutników oznaczane są zazwyczaj symbolami Q i Q . W tablicy stanów zazwyczaj prezentuje się stan wyjścia Q pomijając wyjście Q ,które jest jego negacją.
 układu. Wyjścia przerzutników oznaczane są zazwyczaj symbolami Q i Q . W tablicy stanów zazwyczaj prezentuje się stan wyjścia Q pomijając wyjście Q ,które jest jego negacją.")
25
Symbole graficzne przerzutników w wersji TTL (Transistor Transistor Logic )
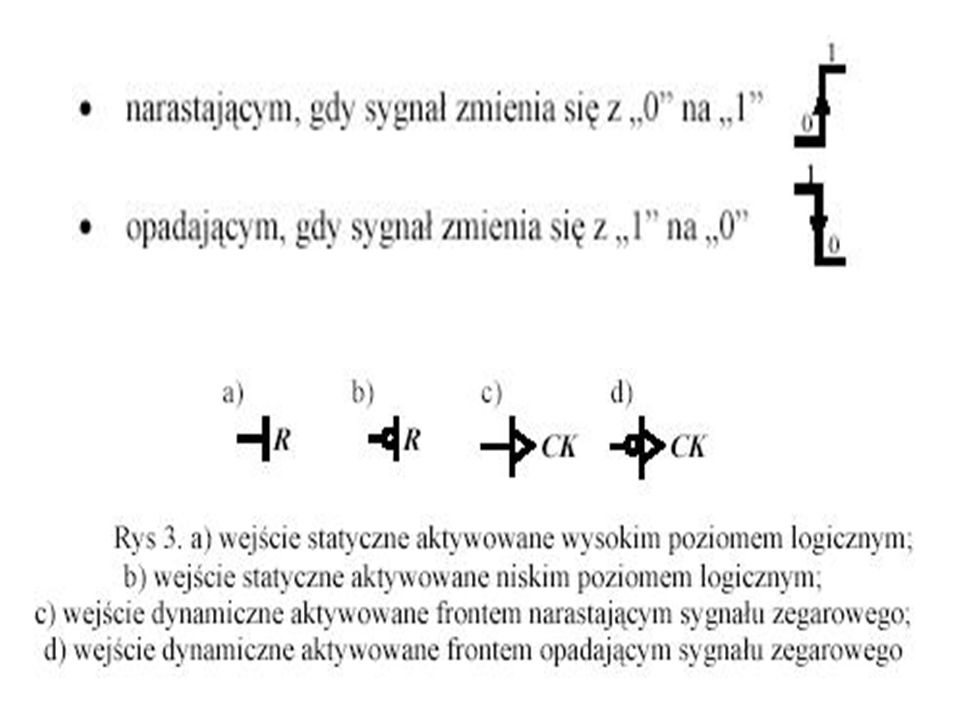
Symbole graficzne przerzutników odzwierciedlają ich strukturę wewnętrzną. Jeżeli umieścimy wskaźnik negacji na wejściu przerzutnika to wejście jest aktywowane niskim poziomem logicznym (w symbolu graficznym należy umieścić okrąg przed nazwą wejścia. Wejścia zegarowe (synchronizujące) oznaczone są poprzez trójkąt równoboczny. Niektóre przerzutniki są wyzwalane (aktywowane) przy zmianie sygnału na wejściu zegarowym; wejście takie nazywamy wejściem dynamicznym. Mówimy wówczas o takim przerzutniku, że jest wyzwalany frontem (sygnału zegarowego):
 oznaczone są poprzez trójkąt równoboczny. Niektóre przerzutniki są wyzwalane (aktywowane) przy zmianie sygnału na wejściu zegarowym; wejście takie nazywamy wejściem dynamicznym. Mówimy wówczas o takim przerzutniku, że jest wyzwalany frontem (sygnału zegarowego):")
27
Asynchroniczny przerzutnik RS
Przerzutnik ten składa się z dwóch odpowiednio połączonych ze sobą bramek. Do budowy tego przerzutnika można wykorzystać bramki NAND lub NOR. Przerzutnik ten ma dwa wejścia informacyjne/programujące R i S oraz dwa wyjścia Q i Q . Wejścia R i S są wejściami asynchronicznymi tzn. ich stany natychmiast oddziaływują na stany wyjść. Rysunek przedstawia schemat przerzutnika asynchronicznego RS zbudowanego z bramek NOR. Podanie stanu „1” na jedno z wejść informacyjnych (programujących) powoduje ustawienie na wyjściu odpowiadającej mu bramki stanu „0” (Suma dwóch sygnałów, z których co najmniej jeden jest równy „1” wynosi „1” a po zanegowaniu daje „0” NOR A+B)
 powoduje ustawienie na wyjściu odpowiadającej mu bramki stanu „0 (Suma dwóch sygnałów, z których co najmniej jeden jest równy „1 wynosi „1 a po zanegowaniu daje „0 NOR A+B)")
28
Schemat logiczny Symbol graficzny tabela stanów uproszczona tabela stanów

29
Podanie stanu „1” na obydwa wejścia przerzutnika spowodowałoby wystąpienie stanów „0” na obydwu wyjściach, co jest niezgodne z założeniem, że w przerzutniku jedno wyjście jest negacją drugiego. Stan ten jest nazywany stanem niedozwolonym N. Podanie stanu „0” na obydwa wejścia daje możliwość określenia stanu wyjść w chwili n-tej wyłącznie na podstawie stanu wyjść w chwili n-1. Jest to stan w którym przerzutnik realizuje funkcję pamiętania sygnału poprzedniego. Na rysunkach symbol X oznacza dowolny sygnał.

30
Synchroniczny przerzutnik RS
Synchroniczny przerzutnik RS różni się w swojej budowie od przerzutnika asynchronicznego dodatkowymi dwoma bramkami dołączonymi na wejściu układu. Przerzutnik ten można zbudować zarówno z bramek NOR, jak i NAND. Na shemacie przedstawiony jest Synchroniczny przerzutnik RS zbudowany bramek NOR:

31
schemat logiczny symbol graficzny tabela stanów uproszczona tabela stanów W tablicy stanów podkreślono stany stabilne, tzn. nie powodujące zmiany stanu wyjść.

32
Przerzutnik D typu „latch” (zatrzask)
Przerzutnik ten jest przerzutnikiem synchronicznym reagującym na poziom niski lub wysoki – wejście zegarowe. Zatem reaguje on tylko na stan wysoki (czynny) na wejściu zegarowym, w czasie martwym stan przerzutnika nie będzie ulegał zmianie – stan pamiętania. D Qn+1 D Q CK Q 1 1 Przerzutniki te służą do budowy rejestrów typu latch
 na wejściu zegarowym, w czasie martwym stan przerzutnika nie będzie ulegał zmianie – stan pamiętania. D. Qn+1. D. Q. CK. Q Przerzutniki te służą do budowy rejestrów typu latch.")
33
Cyfrowe układy funkcjonalne
Są to złożone układy cyfrowe, na podbudowie układów poznanych wcześniej, pełnią określone funkcje: Wykonywanie działań arytmetycznych Krótkoterminowego przechowywania informacji. Dekodowania adresów Wszystkie te układy będą omawiane na zasadzie czarnej skrzynki.

34
Rejestry Def. Rejestrem nazywamy ukł. cyfrowy przeznaczony do krótko terminowego przechowywania niewielkich ilości inf. lub do zmiany postaci inf. z równoległej na szeregową albo odwrotnie. Def. Wejściem cyfrowym równoległym nazywamy takie wejście, które umożliwia wprowadzenie do układu cyfrowego wszystkich bitów słowa w jednym takcie zegarowym. Wynika z tego że ilość zacisków wej. musi być równa ilości bitów wprowadzanych w słowie.

35
Def. Wejściem cyf. szeregowym nazywamy takie wejście, które umożliwia wprowadzanie inf. do układu bit po bicie. Do wprowadzenia słowa n-bitowego potzreba n taktów zegara. Def. Jeżeli inf. wprowadzamy, wyprowadzamy lub przesyłamy bit po bicie, jeden bit na jeden takt zegarowy, to taką postać inf. nazywamy szeregową. Jeżeli wprowadzamy, wyprowadzamy lub przesyłamy wszystkie bity słowa inf. jednocześnie, w jednym takcie zegarowym, to taką inf. nazywamy równoległą.

36
Podział rejestrów na następujące grupy:
-rejestr z wej. i wyj. równoległym – PIPO -rejestr z wej. i wyj. szeregowym – SISO -rejestr z wej. szereg. i wyj. równ. – SIPO -rejestr z wej. równ. i wyj. szereg. – PISO Bramki trójstanowe W ukł. cyf. a szczególnie w ukł. i systemach mikroprocesorowych (komputer), występuje często potrzeba odseparowania elektrycznego dwóch lub więcej punktów ( wielkości elektryczne takie jak napięcie czy prąd nie wpływają wzajemnie na siebie)
, występuje często potrzeba odseparowania elektrycznego dwóch lub więcej punktów ( wielkości elektryczne takie jak napięcie czy prąd nie wpływają wzajemnie na siebie)")
37
Układami umożliwiającymi odseparowanie 2-punktów są bramki trójstanowe
W ukł. cyf. stan logiczny w jednym punkcie odseparowany od innego punktu, nie wpływa na niego i nie jest z nim w żaden sposób związany. Układami umożliwiającymi odseparowanie 2-punktów są bramki trójstanowe Wej Enable Wyj Wej. Wyj. 1 1 1 1 Enable - umożliwiać x z Stan Z występujący w tabeli oznacza tak zwany stan wysokiej impedancji, czyli brak wzajemnego wpływu wej - wyj. Z jest oprócz 1 i 0 trzecim stanem – stąd nazwa.

38
Magistrala W systemach mikroprocesorowych istnieje konieczność zapewnienia komunikacji pomiędzy wieloma układami takimi jak: mikroprocesor, pamięć RAM, ROM, układami wej./wyj.. Połączenie wielu układów każdy z każdym doprowadziło by do nadmiernej ilości połączeń i jest praktycznie nierealne. Dlatego stosuje się sposób połączenia przy pomocy tak zwanej magistrali. Magistrala jest wspólną drogą dzięki której, komunikują się pomiędzy sobą poszczególne układy wchodzące w skład systemu. Aby zapewnić poprawną pracę i brak kolizji w połączeniach, magistrala obsługiwana jest według ściśle określonych, podanych w definicji reguł.

39
Def. Magistralą nazywamy zestaw linii oraz układów przełączających, łączących dwa lub więcej układów mogących być nadajnikami lub odbiornikami informacji. Przesyłanie informacji zachodzi zawsze pomiędzy dokładnie jednym układem będącym nadajnikiem a dokładnie jednym układem będącym odbiornikiem, przy pozostałych układach odseparowanych od linii przesyłowych.

40
Jak wynika z powyższej def
Jak wynika z powyższej def., układy dołączone do magistrali muszą mieć możliwość elektrycznego odseparowania się od linii w których przesyłana jest informacja. Wynika z konieczności zapewnienia jednoznacznego stanu każdej z linii (np. gdyby podłączyły się dwa nadajniki z różnymi stanami logicznymi 0 i 1 to wystąpił by konflikt). Układami zapewniającymi możliwość separacji są właśnie bramki trójstanowe.
. Układami zapewniającymi możliwość separacji są właśnie bramki trójstanowe.")
41
Dwukierunkowe wzmacniacze buforowe
Pomiędzy układy będące w danym momencie na magistrali nadajnikiem a odbiornikiem stosuje się zwykle układy buforowe, pośredniczące w wymianie informacji. Zadaniem tego typu ukł. jest zmniejszenie obciążenia nadajnika przez odbiornik, zwiększenie prądu wyj. i co za tym idzie poprawy kształtu zboczy. W przypadku magistrali, po których inf. może być przesyłana w obydwu kierunkach, takich jak np. magistrala danych, układy wzmacniaczy buforowych muszą działać w dwóch kierunkach tak zwane: nadajnik-odbiornik (transmitter-receiver) ukł. te mogą przejść w stan wysokiej impedancji, separując nawzajem od siebie łączone układy.
 ukł. te mogą przejść w stan wysokiej impedancji, separując nawzajem od siebie łączone układy.")
42
Jednostka arytmetyczno logiczna - ALU
Def. Jednostką arytmetyczno logiczną (ALU) nazywamy uniwersalny układ cyfrowy przeznaczony do wykonania operacji arytmetycznych i logicznych Słowo „uniwersalny” w def. ALU oznacza, że zestaw operacji, które potrafi zrealizować jednostka aytmetyczno-logiczna powinien być funkcjonalnie pełny, jeżeli za jego pomocą jesteśmy w stanie zrealizować dowolny algorytm przetwarzania informacji.
 nazywamy uniwersalny układ cyfrowy przeznaczony do wykonania operacji arytmetycznych i logicznych. Słowo „uniwersalny w def. ALU oznacza, że zestaw operacji, które potrafi zrealizować jednostka aytmetyczno-logiczna powinien być funkcjonalnie pełny, jeżeli za jego pomocą jesteśmy w stanie zrealizować dowolny algorytm przetwarzania informacji.")
43
Algorytm reguły postępowania służące do rozwiązania konkretnych zadań dla różnych zestawów danych, zapewniające otrzymanie rozwiązania w skończonej liczbie kroków. Jeżeli rozwiązanie opiera się na obliczeniach, to trzeba podać w jakiej kolejności według jakich wzorów mają one być wykonane.

44
Do zestawu operacji wykonanych przez ALU należą najczęściej dodawanie i odejmowanie algebraiczne, przesuwanie bitów słowa w prawo i w lewo, porównywanie (komparacja) wartości dwóch słów, operacje iloczynu i sumy logicznej, negacji i alternatywy wykluczającej ALU nie posiada układów pamiętających, dlatego musi współpracować z pewnym zestawem rejestrów. Rejestr przechowujący wyniki operacji nazywa się akumulatorem. Oraz rejestr flagowy zawierający cechy wyniku (np. przeniesienie bitu lub przekroczenie zakresu) Są to dwa podstawowe rejestry z którymi ALU współpracuje.
 Są to dwa podstawowe rejestry z którymi ALU współpracuje.")
45
Dekodery i kodery priorytetu
Dekodery i kodery priorytetu pełnią w systemach mikroprocesorowych ważne funkcje pomocnicze. Def. Dekoderem nazywamy układ cyfrowy mający n wej. oraz k wyj., przy czym k≤2n. Na wej. dekodera podajemy zakodowany numer wyj. na którym ma się pojawić wyróżniony sygnał o wartości np.0 . Na pozostałych wyjściach dekodera powinien występować stan przeciwny do sygnału wyróżnionego o wartosci np.1

46
Kodery priorytetu są pewną modyfikacją układu zwanego koderem, działanie kodera jest w pewnym sensie odwrotne do działania dekodera. Def. Koderem nazywamy układ cyfrowy o n wyj. i k≤2n wejściach, przy czym na wyj. pojawia się zakodowany numer tego wej., na którym ten sygnał wystepuje. W systemach cyfrowych zachodzi często potrzeba przyjmowania sygnałów zgłoszeń od wielu urządzeń i następnie zdecydowania, które z nich będzie obsługiwane. Realizację tych czynności umożliwia koder piorytetu.

47
Def. Koderem priorytetu nazywamy ukł
Def. Koderem priorytetu nazywamy ukł. kodera, w którym wprowadzono następujące zmiany: Na jego wej. może pojawić się więcej niż jeden sygnał wyróżniony. Każdemu wej. przyporządkowano pewien stopień ważności zwany priorytetem Na wyj. pojawia się zakodowany numer tego wej. z wyróżnionym sygnałem, które posiada najwyższy priorytet.

48
Licznik Def. Licznikiem nazywamy ukł. cyfr. na którego wyj. pojawia się zakodowana liczba impulsów podanych na wej. zliczające licznika i zliczone przez licznik. Podstawowymi parametrami licznika jest jego pojemność oraz kod w którym jest podawana ilość zliczanych impulsów. Pojemność określa max ilość impulsów którą może zliczyć licznik. Po przekroczeniu tej wartości licznik zaczyna zliczanie impulsów od początku. Liczniki w systemach mikroproces. są ukł. pomocniczymi.

49
Pamięci półprzewodnikowe
Służą do przechowywania inf. w postaci cyfrowej. Ilość inf., które mogą przechowywać pojedyncze ukł. scalone pamięci zawiera się w zakresie od kilkudziesięciu KB do setek MB. Pamięci dynamiczne RAM (DRAM) pozwalają uzyskać duże pojemności w pojedynczym ukł. scalonym. Zasada działania opiera się na magazynowaniu ładunku w określonej, niewielkiej pojemności elektrycznej. Pojemność nie naładowana oznacza 0 logiczne, zaś poje. naładowana oznacza 1 logiczne.
 pozwalają uzyskać duże pojemności w pojedynczym ukł. scalonym. Zasada działania opiera się na magazynowaniu ładunku w określonej, niewielkiej pojemności elektrycznej. Pojemność nie naładowana oznacza 0 logiczne, zaś poje. naładowana oznacza 1 logiczne.")
50
Pamięci DRAM ze względu na sposób przechowywania inf
Pamięci DRAM ze względu na sposób przechowywania inf. wymagają odświeżania (cyklicznego doładowania tych pojemności które przechowują wartość 1 ) Dostęp do pamięci musi odbywać się z zachowaniem określonych zależności czasowym. W odświeżaniu występuje tryb stronicowania – jest to sposób na przyśpieszenie współpracy z pamięcią DRAM.
 Dostęp do pamięci musi odbywać się z zachowaniem określonych zależności czasowym. W odświeżaniu występuje tryb stronicowania – jest to sposób na przyśpieszenie współpracy z pamięcią DRAM.")
51
Pamięć SDRAM działanie polega na zsynchronizowaniu operacji pamięci z zewnętrznym zegarem. Poprzednie pamięci pracowały asynchronicznie w stosunku do pracy procesora, który z kolei jest ukł. synchronicznym. Synchronizacja operacji pamięci z zegarem procesora pozwala osiągnąć optymalną szybkość współpracy obydwu ukł. Inną metodą pozwalającą zwiększyć szybkość komunikacji jest stosowanie tak zwanego przeplotu

52
Pamięć ROM jest pamięcią nie ulotną, przeznaczoną tylko do odczytu
Pamięć ROM jest pamięcią nie ulotną, przeznaczoną tylko do odczytu. Nie oznacza to że jeżeli jest do odczytu to w określonych warunkach nie można jej zmieniać EEPROM jest pamięcią flash-Bios czyli oprogramowanie Bios, które możemy uaktualniać (np.. na nowe wersje)
")
53
Komputer jest zespołem ukł
Komputer jest zespołem ukł. cyfrowych tworzących system mikroprocesorowy w jego skład wchodzą ukł. przedstawione wcześniej. Ukł. cyfrowe służą do przetwarzania informacji. Przetwarzanie inf. polega na dostarczeniu danych do ukł. bądź systemu, które poddawane są określonym działaniom, dzięki którym otrzymujemy określone wyniki. Wynikami mogą być przykładowo sygnały sterujące pracą pewnych urządzeń, obrazy, teksty itp..

54
Procesor przetwarza informacje, wykonuje elementarne operacje zwane instrukcjami bądź (rozkazami). Ciąg takich instrukcji realizujących konkretne zadanie nazywamy programem. Jednym z elementów systemu mikroprocesorowego jest uniwersalny ukł. przetwarzający informacje. Wykonuje on działania arytmetyczne i logiczne potrzebne do osiągnięcia zamierzonego wyniku. Układ musi jednak współpracować z dodatkowymi układami w celu stworzenia użytecznego systemu mikroprocesorowego.

55
Schemat blokowy systemu mikroprocesorowego
CPU - centralna jednostka przetwarzająca MEM–pamięć RAM I ROM (Bios – podstawowy system obsługi we/wy I/O – układ we/wy AB – magistrala adresowa DB – magistrala danych CB – magistrala sterująca CPU I/O MEM ROM (Bios) RAM (PAO) DB AB CB
 RAM. (PAO) DB. AB. CB.")
56
Zadaniem CPU oprócz przetwarzania inf
Zadaniem CPU oprócz przetwarzania inf. jest sterowanie pracą pozostałych układów. Zegar systemowy wytwarza przebiegi czasowe niezbędne do pracy mikroprocesora i systemu. Sterowniki magistrali jest układ który pośredniczy w sterowaniu magistralami, wytwarzając na podstawie inf. otrzymanych z mikroprocesora (tzw. sygnałów statusowych i sterujących) sygnały sterujące pracą układów pamięci i układów we/wy. Wszystkie operacje zachodzące w systemie są sterowane bądź inicjowane przez mikroproc. Rodzaj tych działań zależy od ciągu instrukcji (programu)
 sygnały sterujące pracą układów pamięci i układów we/wy. Wszystkie operacje zachodzące w systemie są sterowane bądź inicjowane przez mikroproc. Rodzaj tych działań zależy od ciągu instrukcji (programu)")
57
Program musi być przechowywany w pamięciach półprzewodnikowych (szybki dostęp) gdyż pamięci masowe są zbyt wolne, czas pobierania kolejnych instrukcji z nich jest zbyt długi. Pamięci RAM (pamięć operacyjna) przechowywane są w niej instrukcje tworzące programy, dane oraz wyniki działań. Aby system rozpoczął pracę, musi więc istnieć miejsce, gdzie przechowywany jest program inicjujący pracę systemu. Miejsce to musi pamiętać program niezależnie od tego czy napięcie zasilające jest włączone czy nie.
 przechowywane są w niej instrukcje tworzące programy, dane oraz wyniki działań. Aby system rozpoczął pracę, musi więc istnieć miejsce, gdzie przechowywany jest program inicjujący pracę systemu. Miejsce to musi pamiętać program niezależnie od tego czy napięcie zasilające jest włączone czy nie.")
58
Takim miejscem jest pamięć ROM, w niej jest przechowywany Bios czyli podstawowy system obsługi we/wy. Zawiera on między innymi procedury inicjujące pracę systemu oraz umożliwiające wprowadzenie do pamięci operacyjnej dalszego oprogramowania. Ostatnim niezbędnym blokiem systemu jest blok ukł. WE / WY (I/O), pośredniczą one w wymianie inf. pomiędzy mikroprocesorem i pamięcią systemu a urządzeniami zewnętrznymi (peryfyrejnymi) w stosunku do systemu (drukarka, monitor, stacje dysków). Potrzeba tego pośrednictwa wynika z konieczności sterowaniem przepływów inf. o różnej prędkości.
, pośredniczą one w wymianie inf. pomiędzy mikroprocesorem i pamięcią systemu a urządzeniami zewnętrznymi (peryfyrejnymi) w stosunku do systemu (drukarka, monitor, stacje dysków). Potrzeba tego pośrednictwa wynika z konieczności sterowaniem przepływów inf. o różnej prędkości.")
59
Wszystkie te informacje między tymi blokami przesyłane są przez magistrale:
Magistrala danych Magistrala adresowa Magistrala sterujaca Ad.1. Przeznaczona jest do przesyłania danych, wyników oraz kodów instrukcji, jest to magistrala dwukierunkowa. Ad.2. Przesyłane są adresy komórek pamięci lub ukł. we/wy z którymi chce się komunikować mikroprocesor – magistrala jednokierunkowa adresy są generowane przez mikroprocesor, natomiast trafiają do pamięci bądź do ukł. we/wy

60
Ad.3. Właściwie zestaw linii sterujących, linie te służą do sterowania praca ukł. współpracujących z mikroprocesorem oraz do sygnalizowania pewnych ich określonych stanów. Mikroprocesor – pojedynczy ukł. scalony o dużej skali integracji. Schemat blokowy mikroprocesora dzieli się na: Jednostkę wykonawczą Jednostkę sterująca Ad.1. Przetwarzanie inf., czyli wykonywanie wszelkich operacji arytmetycznych i logicznych. Rodzaj wykonywanych operacji zależy od wewnętrznych sygnałów wytwarzanych przez CPU.

61
W skład jednostki wykonawczej wchodzą ALU oraz zestaw współpracujących z nią rejestrów. Informacją wej. części wykonawczej są dane, zaś wyjściową wyniki (liczby, inf. tekstowe, sygnały sterujące ) Ad.2. W skład jednostki sterującej wchodzą: rejestr rozkazów IR dekoder rozkazów układ sterowania W rejestrze rozkazów przechowywany jest kod aktualnie wykonywanego rozkazu. Kody rozkazów pobierane są do rejestru rozkazów z pamięci, ciąg rozkazów tworzy program wykonywany przez system.

62
Po pobraniu z pamięci kod rozkazu jest dekodowany w dekoderze rozkazów
Po pobraniu z pamięci kod rozkazu jest dekodowany w dekoderze rozkazów. Na tej podstawie układ sterowania wytwarza wewnętrzne i/lub zewnętrzne sygnały sterujące realizujące dany rozkaz. Rejestry procesora dostępne programowo: -rejestr flagowy -licznik rozkazów -wskaźnik stosu -rejestry robocze Zgodnie ze schematem blokowym mikroprocesora zarówno ALU jak i ukł. sterujący współpracują z określonymi zestawem rejestrów.

63
Zawartość pewnej części rejestrów z tego zestawu może być zmieniana w wyniku wykonywania przez procesor określonej instrukcji. Rejestry te nazywane są rejestrami dostępnymi programowo. Pozostałe rejestry są niedostępne dla użytkownika i ich zestaw nie jest zwykle znany. W rejestrach dostępnych programowo występują takie typy rejestrów, których odpowiedniki znajdują się praktycznie w każdym procesorze. Ich pojemność czy ilość może się zmieniać, jednak wykonywane zadania pozostają takie same.

64
A F B C D E H L IPC SP Akumulatorem nazywamy rejestr, który zawiera jeden z argumentów wykonanej operacji i do którego jest ładowany wynik wykonanej operacji. Rejestr flagowy nazywamy rejestr zawierający dodatkowe cechy wyniku wykonywanej operacji, potrzebne do podjęcia decyzji o dalszym sposobie przetwarzania informacji. Cechami tymi mogą być np. znak wyniku, przekroczenia zakresu wyniku lub parzystości lub nieparzystości wyniku. Wystąpienie określonego wyniku (+lub-) sygnalizowane jest ustawieniem lub wyzerowaniem określonego bitu w rejestrze flagowym, (znaczniki, flagi) Rejestry procesora dostępne programowo A – Akumulator F – rejestr flagowy B, C, D, E, H, L–rejestry robocze (uniwersalne) IPC – Licznik rozkazów SP – Wskaźnik Stosu
 sygnalizowane jest ustawieniem lub wyzerowaniem określonego bitu w rejestrze flagowym, (znaczniki, flagi) Rejestry procesora. dostępne programowo. A – Akumulator. F – rejestr flagowy. B, C, D, E, H, L–rejestry. robocze (uniwersalne) IPC – Licznik rozkazów. SP – Wskaźnik Stosu.")
65
Licznik rozkazów jest jednym z istotniejszych rejestrów, w nowszych mikroprocesorach nosi nazwę IP – wskaźnika instrukcji. def. Licznikiem rozkazów nazywamy rejestr mikroprocesorowy zawierający adres komórki pamięci, w której przechowywany jest kod rozkazu przeznaczony do wykonania jako następny. Z def. tej wynika że po wczytaniu kolejnego kodu rozkazu zawartość licznika rozkazów powinna zostać zmieniona tak, aby wskazywał on na kolejny rozkaz przeznaczony do wczytania do mikroprocesora.

66
Wskaźnik stosu def. Stosem nazywamy wyróżniony obszar pamięci używany według następujących reguł. 1. Informacje zapisywane są na stos do kolejnych komórek (po kolei pod każdymi adresami), przy czym żadnego adresu nie wolno pominąć. 2. Odczytujemy informację w kolejności odwrotnej do ich zapisu. 3. Informację odczytujemy z ostatnio zapełnionej komórki a zapisujemy do pierwszej wolnej.
, przy czym żadnego adresu nie wolno pominąć. 2. Odczytujemy informację w kolejności odwrotnej do ich zapisu. 3. Informację odczytujemy z ostatnio zapełnionej komórki a zapisujemy do pierwszej wolnej.")
67
Stos jest więc rodzajem pamięci (czy też buforem)
Stos jest więc rodzajem pamięci (czy też buforem). Pamięć taką można porównać do stosu talerzy. Talerze dokładamy do stosu kładąc je na wierzchu a zbieramy zdejmując je także z wierzchu. W przypadku pojęcia stosu w pamięci, konieczna jest znajomość adresu ostatniej zapełnionej komórki stosu, przy czym komórkę odczytana uważamy za pustą. Komórka ta zwana jest wierzchołkiem stosu. def. Wskaźnikiem stosu nazywamy rejestr zawierający adres ostatniej zapełnionej komórki stosu (wierzchołka stosu)
. Pamięć taką można porównać do stosu talerzy. Talerze dokładamy do stosu kładąc je na wierzchu a zbieramy zdejmując je także z wierzchu. W przypadku pojęcia stosu w pamięci, konieczna jest znajomość adresu ostatniej zapełnionej komórki stosu, przy czym komórkę odczytana uważamy za pustą. Komórka ta zwana jest wierzchołkiem stosu. def. Wskaźnikiem stosu nazywamy rejestr zawierający adres ostatniej zapełnionej komórki stosu (wierzchołka stosu)")
68
Jednym z klasycznych zastosowań stosu jest zapamiętanie adresu powrotu do programu wywołującego w przypadku wywołania tak zwanego podprogramu. Ponieważ podprogram może wywołać inny podprogram, adresy powrotów odkładane są na stos, gdyż muszą być odczytane w kolejności odwrotnej do kolejności ich zapisu. Rejestry robocze-uniwersalne są pewnym zestawem rejestrów ogólnego przeznaczenia. Mają przechowywać argumenty wykonanych operacji i wyniki.

69
Realizując program, system mikroprocesorowy wykonuje pewne powtarzające się czynności polegające na cyklicznym pobieraniu kodów rozkazów z pamięci i wczytywaniu ich do ukł. sterowania mikroprocesora, a następnie realizację rozkazu (tego kodu). I dlatego rozróżniamy dwie fazy: fazę pobrania, fazę wykonania. Komputer będący systemem mikroprocesorowym przetwarza informacje zgodne z wykonywanym programem. Program jest ciągiem instrukcji realizujący określony algorytm działania systemu.
. I dlatego rozróżniamy dwie fazy: fazę pobrania, fazę wykonania. Komputer będący systemem mikroprocesorowym przetwarza informacje zgodne z wykonywanym programem. Program jest ciągiem instrukcji realizujący określony algorytm działania systemu..")
70
W pamięci systemu mikroprocesorowego program przechowywany jest w postaci binarnych kodów instrukcji maszynowych (rozkazów) właściwych dla danego procesora. def. Rozkazem (instrukcją maszynową) nazywamy najprostszą operację, której wykonanie programista może zażądać od procesora. def. Listą rozkazów nazywamy zestaw wszystkich instrukcji maszynowych (rozkazów), jakie potrafi wykonać dany procesor.
 nazywamy najprostszą operację, której wykonanie programista może zażądać od procesora. def. Listą rozkazów nazywamy zestaw wszystkich instrukcji maszynowych (rozkazów), jakie potrafi wykonać dany procesor.")
71
Rozróżniamy: 1.Rozkazy przesłań 2.Rozkazy arytmetyczno-logiczne 3.Rozkazy sterujące (skoki, wywołania, pętle) 4.inne (np.. sterowanie pracą procesora, rozkazy testujące, operacje w trybie chronionym) Układy wej/wyj są układami elektronicznymi pośredniczącymi w wymianie informacji pomiędzy systemem mikroprocesorowym a zewnętrznymi urządzeniami współpracującymi, zwanymi „urządzeniami peryferyjnymi”.
 Układy wej/wyj są układami elektronicznymi pośredniczącymi w wymianie informacji pomiędzy systemem mikroprocesorowym a zewnętrznymi urządzeniami współpracującymi, zwanymi „urządzeniami peryferyjnymi .")
72
Potrzeba pośredniczenia w wymianie informacji wynika z następujących faktów:
-istnieją różnice w szybkości działania -istnieją różnice w parametrach elektrycznych -urządzenia wymagają podania informacji w określonym formacie wraz z pewnymi sygnałami sterującymi def. Układem wej/wyj nazywamy ukł. elektroniczny pośredniczący w wymianie inf. pomiędzy mikroprocesorem i pamięcią systemu z jednej strony a urządzeniami peryferyjnymi z drugiej.

73
Operacje wej/wyj - programy realizujące wymianę inf
Operacje wej/wyj - programy realizujące wymianę inf. i wszelkie operacje jej dotyczące nazywamy operacjami wej/wyj. def. Operacjami wej/wyj nazywamy całokształt działań potrzebnych do realizacji wymiany inf. pomiędzy mikroprocesorem i pamięcią z jednej strony a układem wej/wyj z drogiej. Operacje wej/wyj musza być realizowane od początku do końca przez procesor lub tylko przez zainicjowanie operacji wej/wyj przez mikroprocesor, który z kolei przekazuje nadzór nad nią innemu układowi (zarządca magistrali) Stąd operacja dzieli się na:
 Stąd operacja dzieli się na:")
74
operacja z bezpośrednim
operacja z pośrednim sterowaniem przez procesor Z czego operacje z bezpośrednie dzieli się: bezwarunkowe operacje wej/wyj operacje wej/wyj z testowaniem stanu ukł. wej/wyj operacje wej/wyj z przerwaniem programu def. Bezwarunkową operacją wej/wyj nazywamy taka operację przy której realizacji mikroprocesor nie sprawdza gotowości ukł. wej/wyj do tej wymiany.

75
def. Przy realizacji operacji wej/wyj z testowaniem stanu ukł
def. Przy realizacji operacji wej/wyj z testowaniem stanu ukł. wej/wyj mikroprocesor sprawdza sygnał (np. może to być określony bit) gotowości ukł. wej/wyj do tej wymiany. W przypadku potwierdzenia gotowości do tej wymiany przez ukł. jest ona realizowana. Brak gotowości ukł. wej/wyj do wymiany powoduje wykonanie przez mikroprocesor tak zwanej pętli przepytania, w której cyklicznie sprawdza on gotowość ukł. do wymiany.
 gotowości ukł. wej/wyj do tej wymiany. W przypadku potwierdzenia gotowości do tej wymiany przez ukł. jest ona realizowana. Brak gotowości ukł. wej/wyj do wymiany powoduje wykonanie przez mikroprocesor tak zwanej pętli przepytania, w której cyklicznie sprawdza on gotowość ukł. do wymiany.")
76
Jedną z oczywistych wad operacji wej/wyj z testowaniem stanu ukł
Jedną z oczywistych wad operacji wej/wyj z testowaniem stanu ukł. wej/wyj jest konieczność wykonania przez mikroprocesor pętli przepytania w celu stwierdzenia gotowości tego ukł. do wymiany. Rozwiązanie tego problemu jest takie że mikropro. wykonuje pewien program zwany programem głównym, oczekując na sygnał gotowości do wymiany zgłoszony ze strony ukł. wej/wyj. W tym celu mikroprocesor dysponuje określonym wej. zwanym wej. zgłoszenia przerwania. Aktywny poziom na tym wej. sygnalizuje tak zwane zgłoszenie przerwania, czyli gotowości ukł. wej/wyj do wymiany.

77
OGÓLNA BUDOWA KOMPUTERA
Komputery typu PC są obecnie najbardziej rozpowszechnionymi systemami komputerowymi w naszym kraju. Posiadają konstrukcję modułową, pozwalającą na konfigurowanie systemu według potrzeb użytkownika. Każdy komputer zawiera jednostkę systemową, do której dołączona jest klawiatura i monitor i inne urządzenia zewnętrzne np. drukarka.

78
Komputer zawiera następujące urządzenia i bloki funkcjonalne:
płytę główną, karty rozszerzające funkcje zestawu (karta graficzna, karta dźwiękowa, karta sieci lokalnej, itd), napęd CD, napęd dysków elastycznych, dysk twardy, zasilacz.
, napęd CD, napęd dysków elastycznych, dysk twardy, zasilacz.")
79
Podstawowym komponentem jednostki systemowej jest płyta główna, zawierająca główne elementy architektury systemu, takie jak: procesor (np. PENTIUM firmy Intel lub ATHLON firmy AMD, itd) pamięć główną RAM, umieszczoną w specjalnych złączach, pamięć stałą EPROM - zawierającą podstawowe testy diagnostyczne oraz oprogramowanie BIOS, pamięć CMOS z zegarem czasu rzeczywistego, układy (zwane Chipset) odpowiedzialne za przepływ informacji pomiędzy poszczególnymi komponentami systemu.
 pamięć główną RAM, umieszczoną w specjalnych złączach, pamięć stałą EPROM - zawierającą podstawowe testy diagnostyczne oraz oprogramowanie BIOS, pamięć CMOS z zegarem czasu rzeczywistego, układy (zwane Chipset) odpowiedzialne za przepływ informacji pomiędzy poszczególnymi komponentami systemu.")
80
Płyta główna zawiera również sporą liczbę złącz, zworek i mikroprzełączników.
Posiada przede wszystkim kilka złącz (gniazd rozszerzeń), pozwalających dołączyć do systemu komputerowego karty, rozszerzające funkcje zestawu. Mogą to być karty graficzne, sterowniki interfejsów, karty sieci lokalnych, karty modemowe, karty dźwiękowe, itd. Złącze (gniazdo rozszerzeń) wg. standardu ISA posiada 16-bitową szynę danych. Gniazda standardu PCI posiadają 32-bitową magistralę danych taktowaną zegarem 33 MHz, obecnie szeroko stosowane są złącza PCI.
, pozwalających dołączyć do systemu komputerowego karty, rozszerzające funkcje zestawu. Mogą to być karty graficzne, sterowniki interfejsów, karty sieci lokalnych, karty modemowe, karty dźwiękowe, itd. Złącze (gniazdo rozszerzeń) wg. standardu ISA posiada 16-bitową szynę danych. Gniazda standardu PCI posiadają 32-bitową magistralę danych taktowaną zegarem 33 MHz, obecnie szeroko stosowane są złącza PCI.")
81
Każda płyta główna posiada również gniazda pozwalające rozszerzyć pojemność pamięci RAM. Starszego typu złącza typu SIMM (ang. Single In-line Memory Modules) lub nowszego typu DIMM (ang. Dual In-line Memory Modules), w które osadzić można moduły pamięci o standardowych pojemnościach (np. 128 MB). Moduły SIMM (DIMM) są to podłużne płytki wyposażone w złącze krawędziowe, na których umieszczono "kostki" pamięci. Moduły te dostarczane są w różnych rozmiarach, od kilku do kilkuset MB.
 lub nowszego typu DIMM (ang. Dual In-line Memory Modules), w które osadzić można moduły pamięci o standardowych pojemnościach (np. 128 MB). Moduły SIMM (DIMM) są to podłużne płytki wyposażone w złącze krawędziowe, na których umieszczono kostki pamięci. Moduły te dostarczane są w różnych rozmiarach, od kilku do kilkuset MB..")
82
Współczesne procesory instalowane są na płytach głównych w gniazdach Socket lub Slot. Konstrukcja tych gniazd umożliwia łatwą wymianę procesorów. Pamięć stała EEPROM przechowuje oprogramowanie obsługujące urządzenia wejścia/wyjścia, dołączone do mikrokomputera (tzw. BIOS). Pamięć tę użytkownik może sam skasować i ponownie zaprogramować. Pozwala to na uaktualnianie systemu BIOS i wprowadzanie nowej wersji).
. Pamięć tę użytkownik może sam skasować i ponownie zaprogramować. Pozwala to na uaktualnianie systemu BIOS i wprowadzanie nowej wersji).")
83
Pamięć CMOS przechowuje informację o konfiguracji systemu (np
Pamięć CMOS przechowuje informację o konfiguracji systemu (np. typ dysków elastycznych i twardych, typ karty graficznej, itd.). Informację tę wpisuje użytkownik za pomocą programu SETUP. Integralną częścią tego układu jest zegar czasu rzeczywistego. Dla podtrzymania informacji w pamięci CMOS, po wyłączeniu komputera i podtrzymania pracy zegara, niezbędne jest niezależne źródło zasilania. Jest nim bateria umieszczona na płycie głównej.
. Informację tę wpisuje użytkownik za pomocą programu SETUP. Integralną częścią tego układu jest zegar czasu rzeczywistego. Dla podtrzymania informacji w pamięci CMOS, po wyłączeniu komputera i podtrzymania pracy zegara, niezbędne jest niezależne źródło zasilania. Jest nim bateria umieszczona na płycie głównej.")
84
Sterowanie klawiaturą odbywa się za pomocą jednoukładowego procesora typu 8042 wbudowanego przeważnie w jeden z układów typu Chipset. W pamięci stałej tego procesora zawarty jest program autonomicznie obsługujący interfejs klawiatury. Klawiatura łączona jest z systemem, 5-stykowym złączem typu DIN lub tzw. złączem PS/2 (ang. Keyboard Connector). Ponadto na płycie głównej znajduje się kilka układów scalonych wysokiej skali integracji (typu Chipset).
. Ponadto na płycie głównej znajduje się kilka układów scalonych wysokiej skali integracji (typu Chipset)..")
85
Zapewniają one współpracę pomiędzy poszczególnymi elementami systemu komputerowego. Współczesne płyty główne zawierają przeważnie dwa lub trzy układy typu Chipset. Starsze płyty zasilane są przez 12-stykowe złącze (ang. Power Supply Connector), za pomocą którego doprowadza się z zasilacza napięcia: +5V, -5V, +12V, -12V. Nowsze płyty (standardu ATX) wyposażone są w 20-stykowe złącze zasilania zapewniające następując napięcia: +12V, -12V, +5V, -5V, +3.3V. Obecnie pracuje się nad standardem BTX.
, za pomocą którego doprowadza się z zasilacza napięcia: +5V, -5V, +12V, -12V. Nowsze płyty (standardu ATX) wyposażone są w 20-stykowe złącze zasilania zapewniające następując napięcia: +12V, -12V, +5V, -5V, +3.3V. Obecnie pracuje się nad standardem BTX.")
86
ZASADA DZIAŁANIA KOMPUTERA
Typowy system mikroprocesorowy składa się z następujących elementów: procesora, pamięci operacyjnej RAM, pamięci stałej ROM, układów wejścia/wyjścia oraz układów sterujących przepływem informacji pomiędzy w/w elementami. Procesor jest zarazem mózgiem i sercem komputera, elementem który potrafi wykonać dane instrukcje – programy. Procesor wykonuje operacje matematyczno-logiczne. Często jest nazywany główną jednostką przetwarzającą lub CPU, czasami także mikroprocesorem.

87
Procesor przetwarza dane, wykonując na nich podstawowe operacje arytmetyczne i logiczne, na podstawie instrukcji (rozkazów) odczytanych z pamięci operacyjnej. Zbiór tych instrukcji, określających sposób wykonania konkretnego zadania nazywamy programem. Program i dane przechowywane są w pamięci operacyjnej komputera. W pamięci tej zapisywane są również rezultaty wszelkich operacji (np. obliczeń) wykonywanych przez procesor. Jest to więc pamięć umożliwiająca zapis i odczyt informacji, tzw. pamięć o swobodnym dostępie (ang, Rondom Access Memory, RAM)
 wykonywanych przez procesor. Jest to więc pamięć umożliwiająca zapis i odczyt informacji, tzw. pamięć o swobodnym dostępie (ang, Rondom Access Memory, RAM).")
88
Jest to pamięć ulotna, co oznacza, iż po wyłączeniu zasilania, informacja w niej przechowywana jest bezpowrotnie tracona. Układy wejścia/wyjścia (ang. Input/Output, l/O), zwane też peryferyjnymi, umożliwiają komunikację człowieka z komputerem. W pamięci stałej (służącej tylko do odczytu - ang. Read Only Memory, ROM) znajdują się podstawowe testy diagnostyczne mikrokomputera (ang. POST - Power On Self Tesf) oraz oprogramowanie obsługujące urządzenia wejścia/wyjścia, dołączone do mikroprocesora (ang. BIOS, Basic Input Output System).
, zwane też peryferyjnymi, umożliwiają komunikację człowieka z komputerem. W pamięci stałej (służącej tylko do odczytu - ang. Read Only Memory, ROM) znajdują się podstawowe testy diagnostyczne mikrokomputera (ang. POST - Power On Self Tesf) oraz oprogramowanie obsługujące urządzenia wejścia/wyjścia, dołączone do mikroprocesora (ang. BIOS, Basic Input Output System).")
89
Pamięć ta zachowuje swoją zawartość nawet po wyłączeniu zasilania
Pamięć ta zachowuje swoją zawartość nawet po wyłączeniu zasilania. We współczesnych komputerach stosuje się najczęściej pamięć stałą typu EEPROM, którą użytkownik może sam skasować i ponownie zaprogramować, bez wymontowywania jej z systemu. Pozwala to na uaktualnianie systemu BIOS (wprowadzanie nowej wersji). Umieszczona jest ponadto w podstawce, dzięki czemu istnieje możliwość jej wymiany.
. Umieszczona jest ponadto w podstawce, dzięki czemu istnieje możliwość jej wymiany.")
91
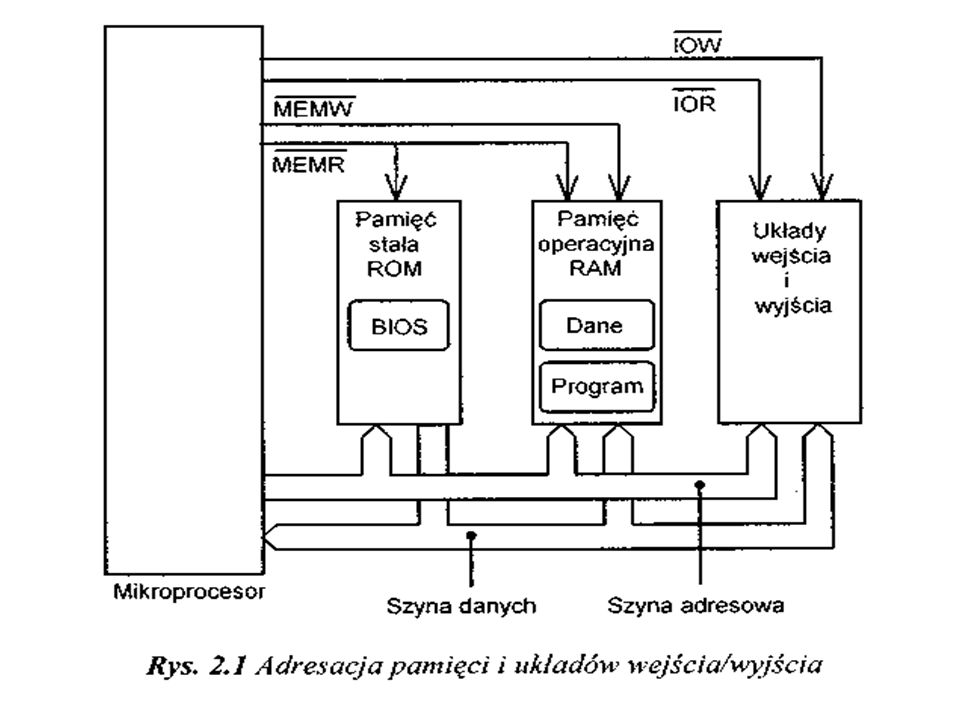
Współpraca mikroprocesora z otoczeniem odbywa się z pomocą szyny adresowej, szyny danych i sygnałów sterujących, umożliwiających zapis lub odczyt danych do/z pamięci lub układów wejścia/wyjścia. Pamięć adresowana jest z użyciem sygnałów MEMW (Memory Write - zapis do pamięci) i MEMR (Memory Read - odczyt z pamięci). Układy wej/wyj dostępne są dla procesora przy aktywnych sygnałach IOW (Input/Outpm Write - zapis do układów wejścia/wyjścia) i IOR (Input/Output Read - odczyt z układów wejścia/wyjścia). Rysunek ilustruje schemat systemu mikroprocesorowego zawierającego blok pamięci i układy wej/wyj.
 i MEMR (Memory Read - odczyt z pamięci). Układy wej/wyj dostępne są dla procesora przy aktywnych sygnałach IOW (Input/Outpm Write - zapis do układów wejścia/wyjścia) i IOR (Input/Output Read - odczyt z układów wejścia/wyjścia). Rysunek ilustruje schemat systemu mikroprocesorowego zawierającego blok pamięci i układy wej/wyj..")
92
PAMIĘĆ OPERACYJNA (główna)
Pamięć operacyjna (zwana też pamięcią główną - ang. Main Memory) przechowuje programy (lub fragmenty programów) oraz dane, na których aktualnie wykonywane są operacje. Współczesne oprogramowanie wymaga zastosowania pamięci o dużych pojemnościach, rzędu kilkudziesięciu-kilkuset megabajtów (MB). Z tego powodu w komputerach stosowane są głównie pamięci dynamiczne RAM (ang. Dynamie RAM, DRAM), które charakteryzują się niskimi kosztami wytwarzania. Niestety szybkość działania tych pamięci jest zdecydowanie niższa od szybkości procesorów. Fakt ten powoduje wyraźne spowolnienie pracy procesora.
 przechowuje programy (lub fragmenty programów) oraz dane, na których aktualnie wykonywane są operacje. Współczesne oprogramowanie wymaga zastosowania pamięci o dużych pojemnościach, rzędu kilkudziesięciu-kilkuset megabajtów (MB). Z tego powodu w komputerach stosowane są głównie pamięci dynamiczne RAM (ang. Dynamie RAM, DRAM), które charakteryzują się niskimi kosztami wytwarzania. Niestety szybkość działania tych pamięci jest zdecydowanie niższa od szybkości procesorów. Fakt ten powoduje wyraźne spowolnienie pracy procesora.")
93
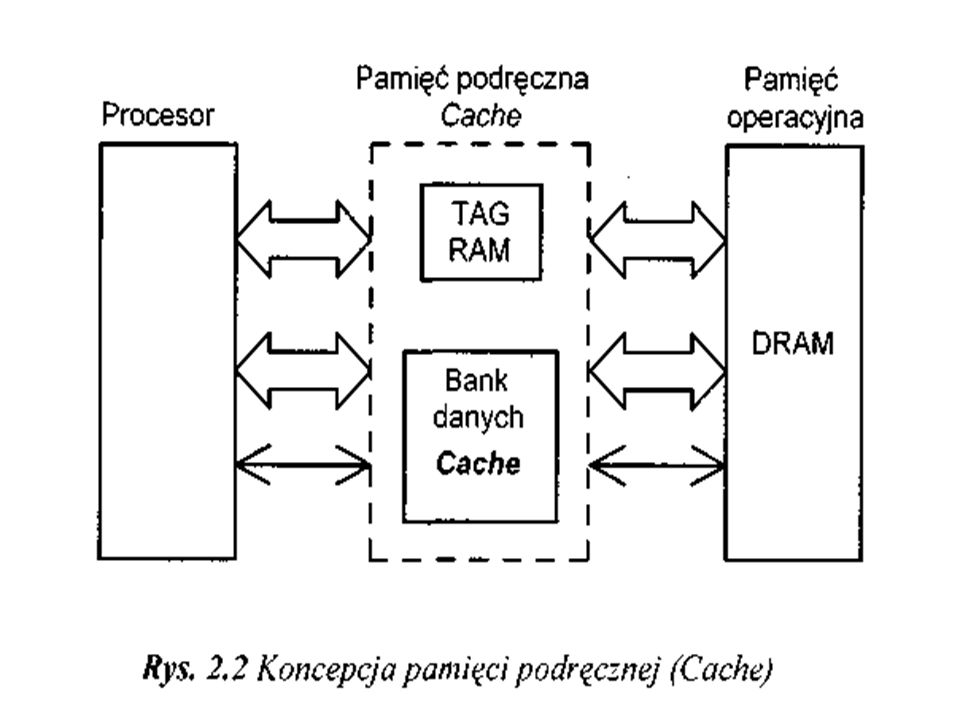
Dlatego też w komputerach PC, pomiędzy wolną dynamiczną pamięcią operacyjną (DRAM) a procesorem wstawiona została (w formie bufora) szybka pamięć podręczna (ang. Cache Memory), służąca do przechowywania często używanych danych. Do tego celu wykorzystuje się wprawdzie drogą, ale za to bardzo szybką pamięć statyczną RAM (ang. Static RAM, SRAM) o niewielkiej pojemności (256K - 2M). Pracą pamięci podręcznej steruje kontroler (ang. Cache Conlroller), którego działanie wyjaśnione zostanie na przykładzie odczytu danych z pamięci operacyjnej.
, służąca do przechowywania często używanych danych. Do tego celu wykorzystuje się wprawdzie drogą, ale za to bardzo szybką pamięć statyczną RAM (ang. Static RAM, SRAM) o niewielkiej pojemności (256K - 2M). Pracą pamięci podręcznej steruje kontroler (ang. Cache Conlroller), którego działanie wyjaśnione zostanie na przykładzie odczytu danych z pamięci operacyjnej..")
94
Żądanie procesora odczytu danych jest przechwytywane przez kontroler, który sprawdza czy dane, które procesor chce odczytać, znajdują się w pamięci podręcznej. W sytuacji trafienia (ang. Cache Hit), kontroler przesyła te dane do procesora, bez konieczności czytania ich z wolnej pamięci operacyjnej, a tym samym, bez konieczności wprowadzania procesora w stan oczekiwania. W przypadku chybienia, kontroler odczytuje dane z pamięci operacyjnej, przesyła je do procesora oraz jednocześnie wpisuje je do pamięci podręcznej.
, kontroler przesyła te dane do procesora, bez konieczności czytania ich z wolnej pamięci operacyjnej, a tym samym, bez konieczności wprowadzania procesora w stan oczekiwania. W przypadku chybienia, kontroler odczytuje dane z pamięci operacyjnej, przesyła je do procesora oraz jednocześnie wpisuje je do pamięci podręcznej..")
95
Liczba trafień do całkowitej liczby odczytów jest większa niż 90%, co oznacza że ponad 90% odczytów jest dokonywanych z pamięci podręcznej, a tylko 10% ze znacznie wolniejszej pamięci DRAM. Pozwala to wydatnie zwiększyć szybkość pracy komputera. Zapis danych przesyłanych z procesora do pamięci operacyjnej DRAM odbywa się z wykorzystaniem jednej z dwóch metod: Write Through (zapis równoczesny) i Write Back (zapis opóźniony).
 i. Write Back (zapis opóźniony).")
96
Metoda Write Through polega na zapisie danych z procesora do pamięci Cache i jednoczesnym uaktualnieniu ich w pamięci głównej. Metoda Write Back polega na tym, iż kontroler Cache uaktualnia dane w pamięci głównej tylko w szczególnych przypadkach, np. gdy blok danych w pamięci Cache ma być skasowany. Pamięć Cache składa się z dwóch części: banku danych Cache i katalogu (TAG RAM).
.")
98
Początkowo procesory wyposażane były w wewnętrzną, zintegrowaną z jądrem procesora, pamięć Cache o pojemności od 32 do 128 kilobajtów. Pamięć ta, zwana pamięcią Cache pierwszego poziomu, oznaczana jest symbolem L1 (ang. Level 1). Na starszych płytach głównych montowana była dodatkowo pamięć zewnętrzna Cache (zwana też pamięcia drugiego poziomu i oznaczana symbolem L2). Obecnie wszystkie produkowane procesory wyposażane są standardowo w pamięci Cache L1 i L2, które w sposób zauważalny zwiększają szybkość przetwarzania danych (tzw. moc obliczeniową komputera).
. Na starszych płytach głównych montowana była dodatkowo pamięć zewnętrzna Cache (zwana też pamięcia drugiego poziomu i oznaczana symbolem L2). Obecnie wszystkie produkowane procesory wyposażane są standardowo w pamięci Cache L1 i L2, które w sposób zauważalny zwiększają szybkość przetwarzania danych (tzw. moc obliczeniową komputera)..")
99
Układy wejścia/wyjścia
Podczas operacji wejścia/wyjścia zachodzi wymiana informacji pomiędzy pamięcią operacyjną systemu mikroprocesorowego a urządzeniami peryferyjnymi. Operacje te mogą być realizowane na dwa sposoby: pod nadzorem procesora lub z bezpośrednim dostępem do pamięci (bez udziału procesora). Operacje we/wy nadzorowane przez procesor, zwane są również operacjami typu PIO (ang. Programmed Input/Output). Procesor generuje wszystkie sygnały sterujące i adresy, niezbędne do przesłania informacji do/z pamięci operacyjnej.
. Operacje we/wy nadzorowane przez procesor, zwane są również operacjami typu PIO (ang. Programmed Input/Output). Procesor generuje wszystkie sygnały sterujące i adresy, niezbędne do przesłania informacji do/z pamięci operacyjnej.")
100
W trakcie tej czynności nie może wykonywać żadnych innych operacji - fakt ten spowalnia pracę komputera. Typowym przykładem operacji nadzorowanych przez procesor są tzw. operacje we/wy z przerwaniem programu. Cykl operacji rozpoczyna urządzenie peryferyjne, które sygnalizuje za pomocą lini IRQn (ang. Interrupt Request - żądanie przerwania) gotowość wymiany informacji. Specjalny układ, zwany kontrolerem przerwań powiadamia o tym fakcie procesor (sygnałem INTR), który z kolei przerywa wykonywanie swojego programu (potwierdza to sygnałem INTA) i rozpoczyna wymianę informacji pomiędzy urządzeniem a pamięcią operacyjną.
 gotowość wymiany informacji. Specjalny układ, zwany kontrolerem przerwań powiadamia o tym fakcie procesor (sygnałem INTR), który z kolei przerywa wykonywanie swojego programu (potwierdza to sygnałem INTA) i rozpoczyna wymianę informacji pomiędzy urządzeniem a pamięcią operacyjną..")
101
Każde urządzenie posiada swój oryginalny numer przerwania (np
Każde urządzenie posiada swój oryginalny numer przerwania (np. IRQ3, IRQ4,...). Jeśli dwa urządzenia zgłoszą jednocześnie żądanie przerwania, to obsłużone najpierw zostanie urządzenie o wyższym priorytecie (niższy numer przerwania to wyższy priorytet). Wymiana informacji (pomiędzy pamięcią operacyjną a urządzeniem peryferyjnym) z bezpośrednim dostępem do pamięci (ang. Direct Memory Access - DMA) zachodzi bez udziału procesora (który w tym czasie może wykonywać inne operacje). Sterowanie operacją wejścia/wyjścia realizowane jest przez specjalny układ zwany kontrolerem DMA, który przejmuje kontrolę nad magistralami.
. Jeśli dwa urządzenia zgłoszą jednocześnie żądanie przerwania, to obsłużone najpierw zostanie urządzenie o wyższym priorytecie (niższy numer przerwania to wyższy priorytet). Wymiana informacji (pomiędzy pamięcią operacyjną a urządzeniem peryferyjnym) z bezpośrednim dostępem do pamięci (ang. Direct Memory Access - DMA) zachodzi bez udziału procesora (który w tym czasie może wykonywać inne operacje). Sterowanie operacją wejścia/wyjścia realizowane jest przez specjalny układ zwany kontrolerem DMA, który przejmuje kontrolę nad magistralami.")
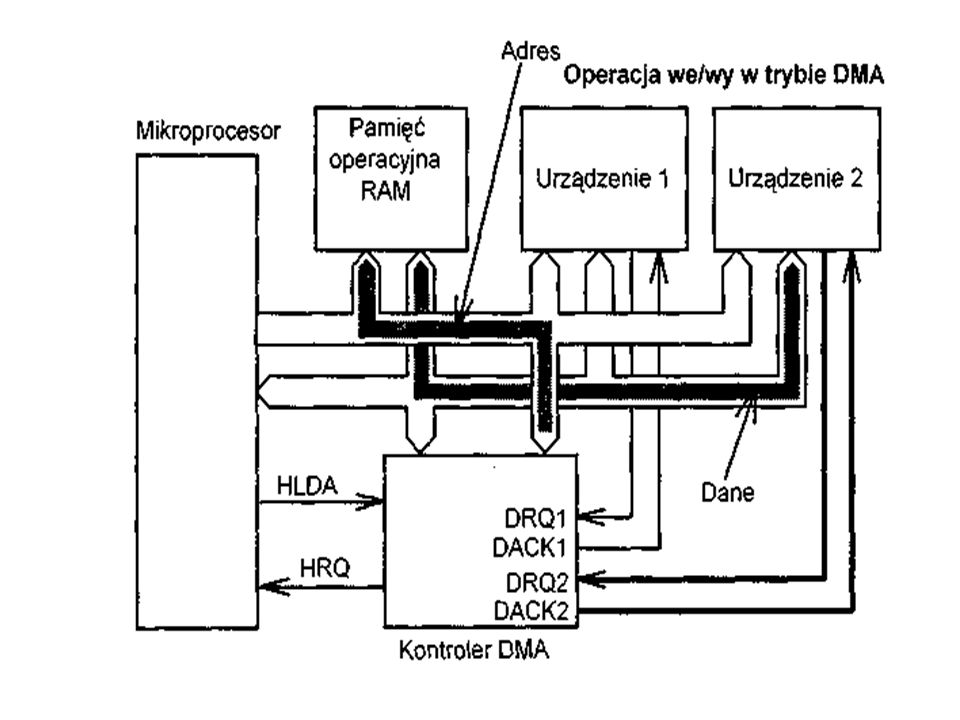
104
Operacja DMA inicjowana jest przez urządzenie sygnałem DRQn (n - numer kanału DMA). Układ DMA, za pomocą sygnału HRQ, zgłasza gotowość przejęcia kontroli nad magistralami. Procesor wprowadza swoje magistrale w stan zawieszenia i fakt ten potwierdza sygnałem HLDA. Kontroler, za pomocą linii DACK, informuje urządzenie o ustawieniu trybu DMA. Rozpoczyna się transmisja danych.

Podobne prezentacje

>")


















