Pobierz prezentację
1
Przypomnienie Podstawy elektroniki, techniki cyfrowej i impulsowej,

2
Elementy bierne:

3
Dzielnik potencjometryczny

4
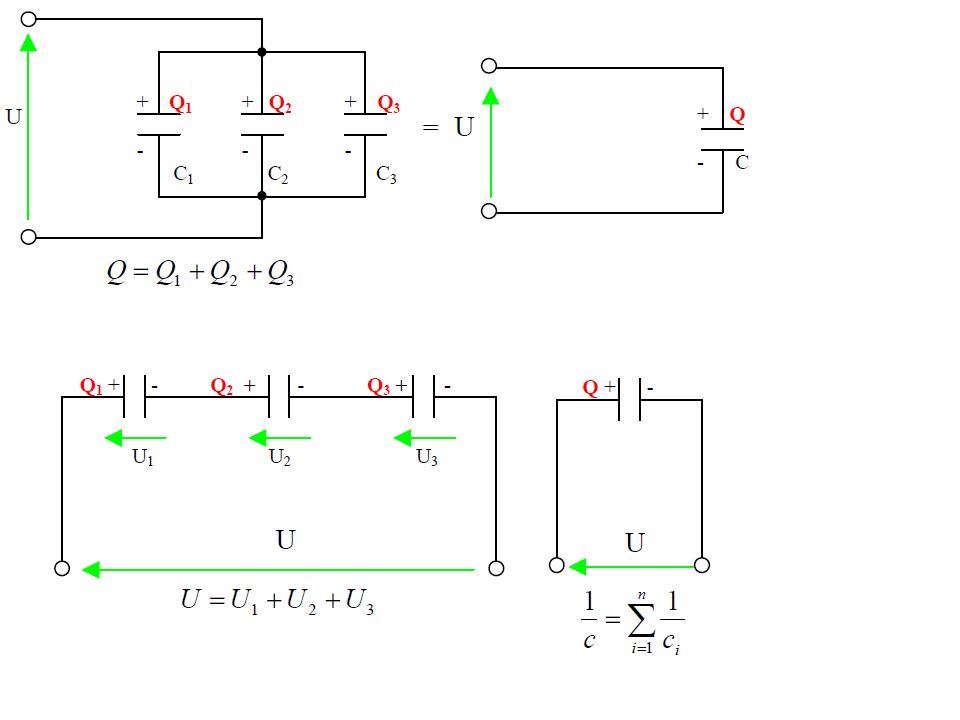
Kondensator

6
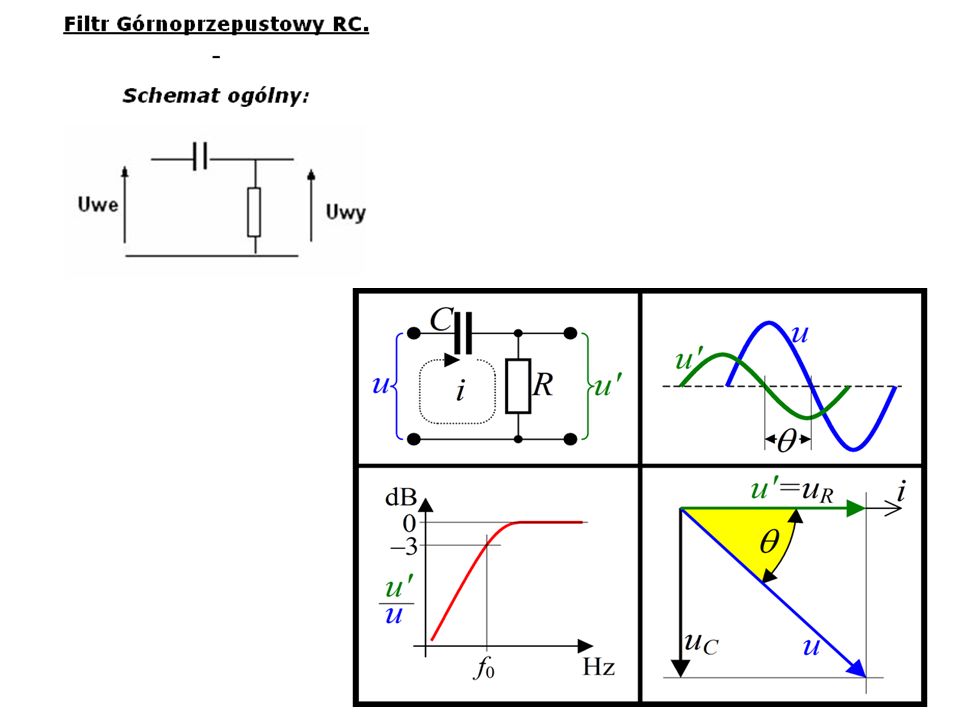
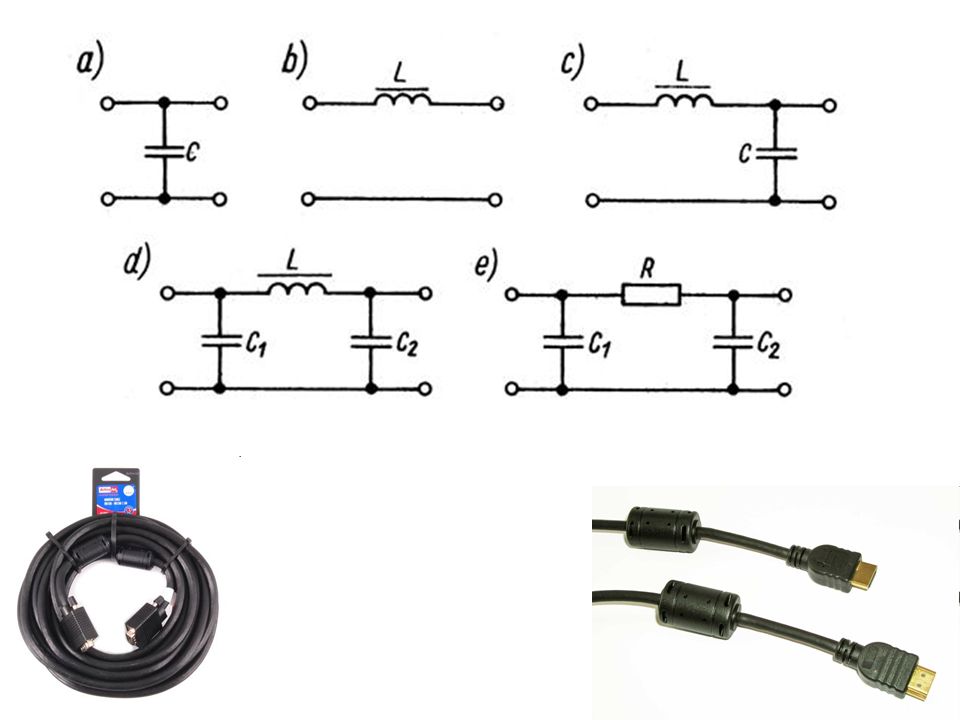
Zastosowania np. filtry pasywne

7
Filtry pasywne są wykonane tylko z pasywnych elementów RLC
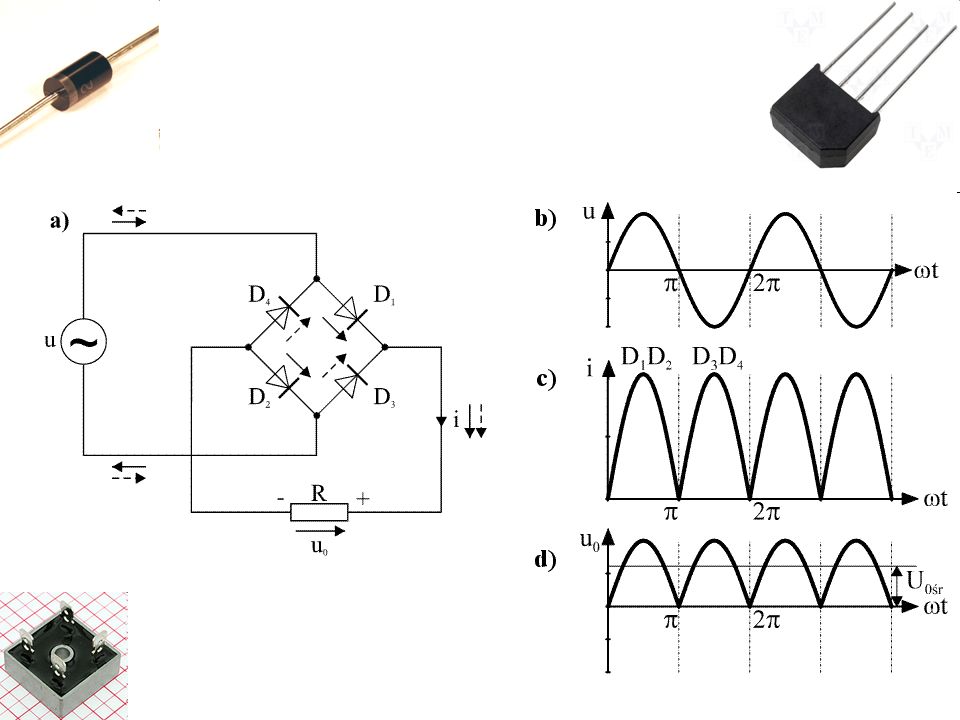
Filtry pasywne są wykonane tylko z pasywnych elementów RLC. Przy odpowiednim połączeniu elementów można uzyskać wszystkie typy filtrów. Filtry pasywne wykonuje się też jako elementy z materiałów piezoelektrycznych z odpowiednio napylonymi elektrodami. Najprostszym rodzajem filtra pasywnego, szeroko stosowanego w elektronice, jest filtr dolnoprzepustowy w postaci kondensatora o dużej pojemności połączonego równolegle do filtrowanego napięcia (z ewentualnym szeregowym opornikiem). Urządzenia elektroniczne są często zasilane z sieci energetycznej za pomocą zasilaczy. Napięcie sieci (o skutecznej wartości 230 V) jest transformowane na niskie napięcie użyteczne (np. 12 V), które jest następnie prostowane za pomocą prostownika dwupołówkowego. Napięcie wyjściowe takiego prostownika ma przebieg tętniący. Dopiero równoległe dołączenie kondensatora o odpowiedniej pojemności powoduje znaczne zmniejszenie amplitudy tętnień, czyli proces filtrowania. Im większa jest pojemność użytego kondensatora, tym napięcie wyjściowe ma przebieg bardziej zbliżony do przebiegu stałego.
. Urządzenia elektroniczne są często zasilane z sieci energetycznej za pomocą zasilaczy. Napięcie sieci (o skutecznej wartości 230 V) jest transformowane na niskie napięcie użyteczne (np. 12 V), które jest następnie prostowane za pomocą prostownika dwupołówkowego. Napięcie wyjściowe takiego prostownika ma przebieg tętniący. Dopiero równoległe dołączenie kondensatora o odpowiedniej pojemności powoduje znaczne zmniejszenie amplitudy tętnień, czyli proces filtrowania. Im większa jest pojemność użytego kondensatora, tym napięcie wyjściowe ma przebieg bardziej zbliżony do przebiegu stałego.")
9
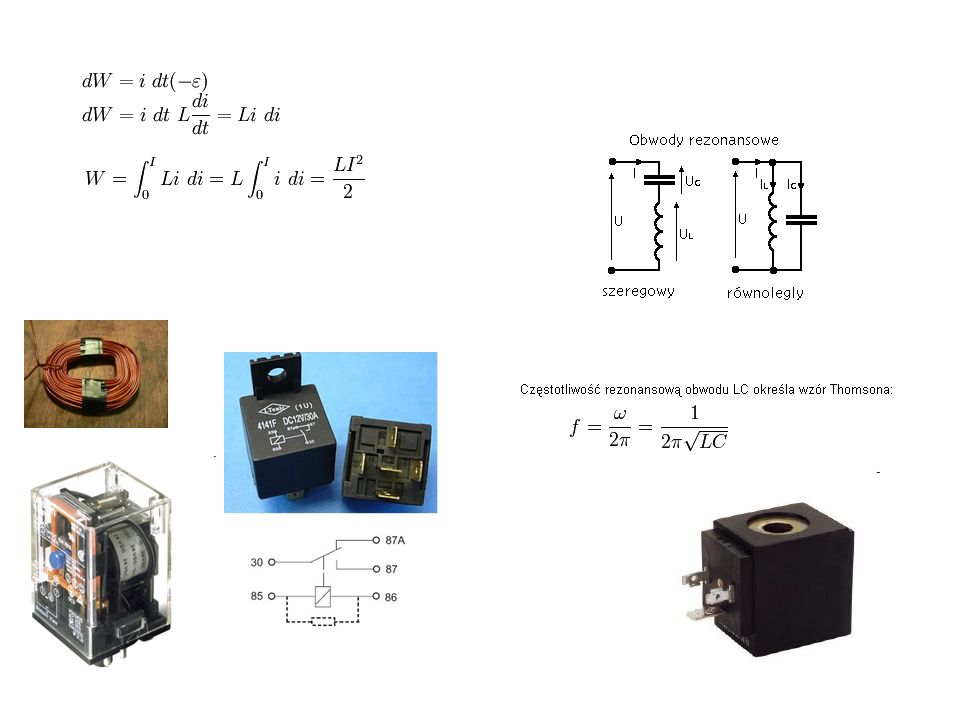
Cewka indukcyjna

12
Transformator

14
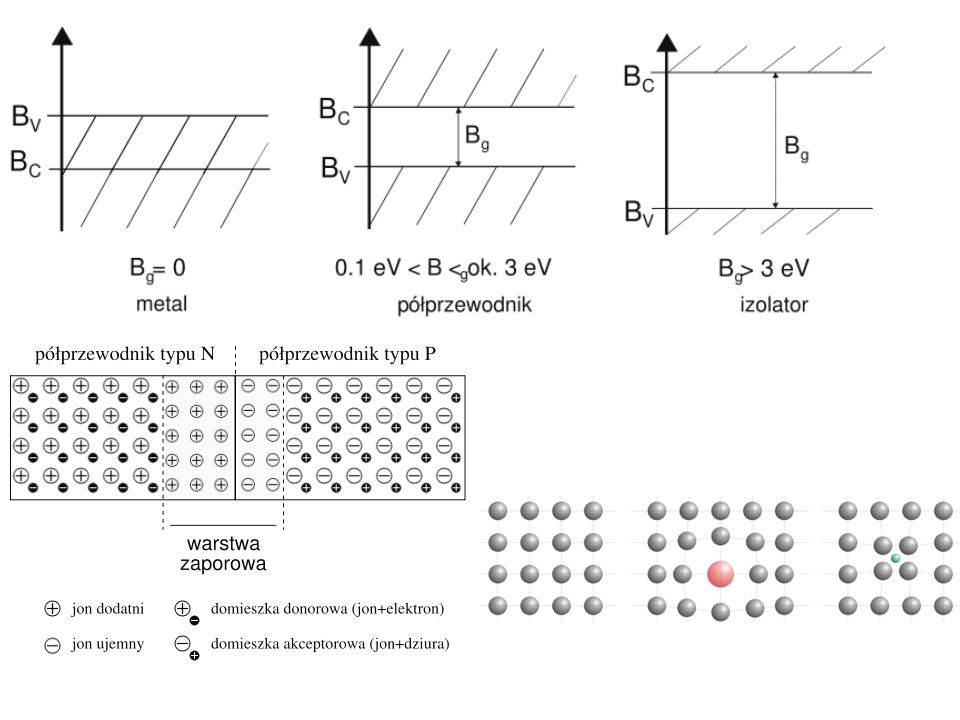
Elementy półprzewodnikowe

17
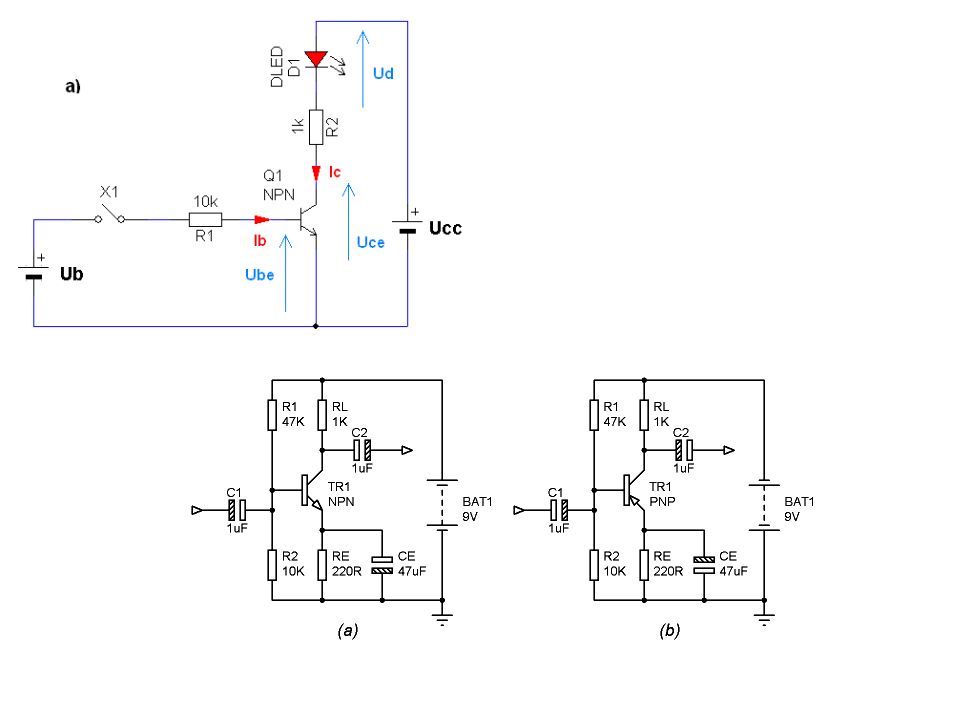
Luminescencja emitowanie przez materię promieniowania elektromagnetycznego pod wpływem czynnika pobudzającego, które dla pewnych długości fali przewyższa emitowane przez tę materię promieniowanie temperaturowe. W diodzie LED mamy do czynienia z tzw. Elektroluminescencją. Źródłem energii pobudzającej jest prąd elektryczny dostarczony z zewnątrz. Najefektywniejsza elektroluminescencja w półprzewodniku powstaje w wyniku rekombinacji swobodnych nośników ładunku w złączu p-n, gdy jest ono spolaryzowane w kierunku przewodzenia. Intensywność świecenia zależy od wartości doprowadzonego prądu, przy czym zależność ta jest liniowa w dużym zakresie zmian prądu. Zjawiska przeszkadzające elektroluminescencji to pochłanianie wewnętrzne i całkowite odbicie wewnętrzne.

19
Tranzystor bipolarny

21
Fototranzystor

22
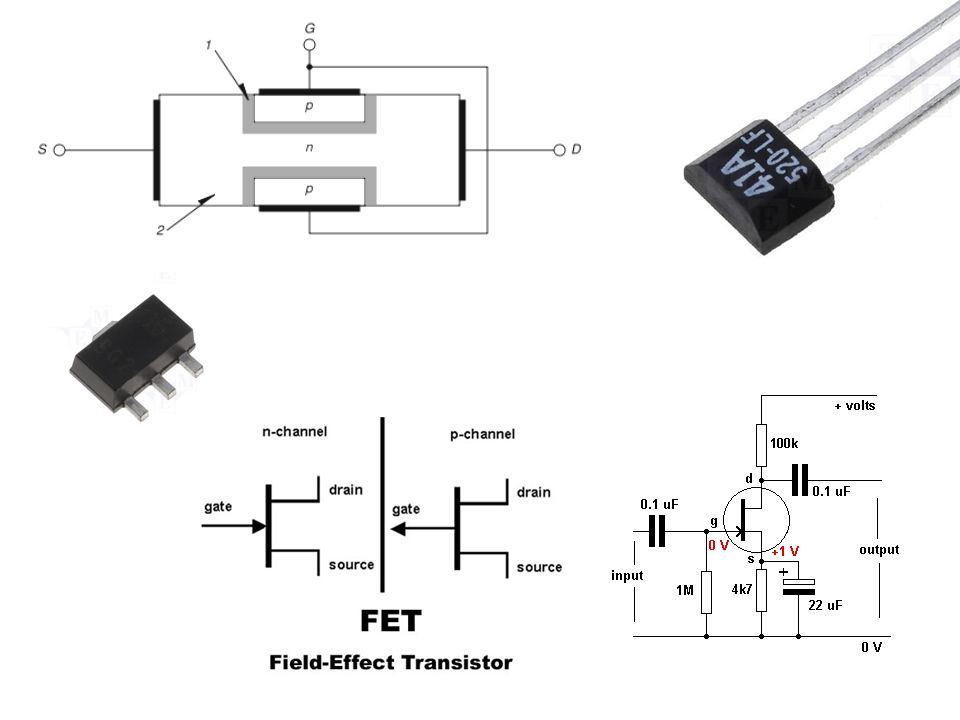
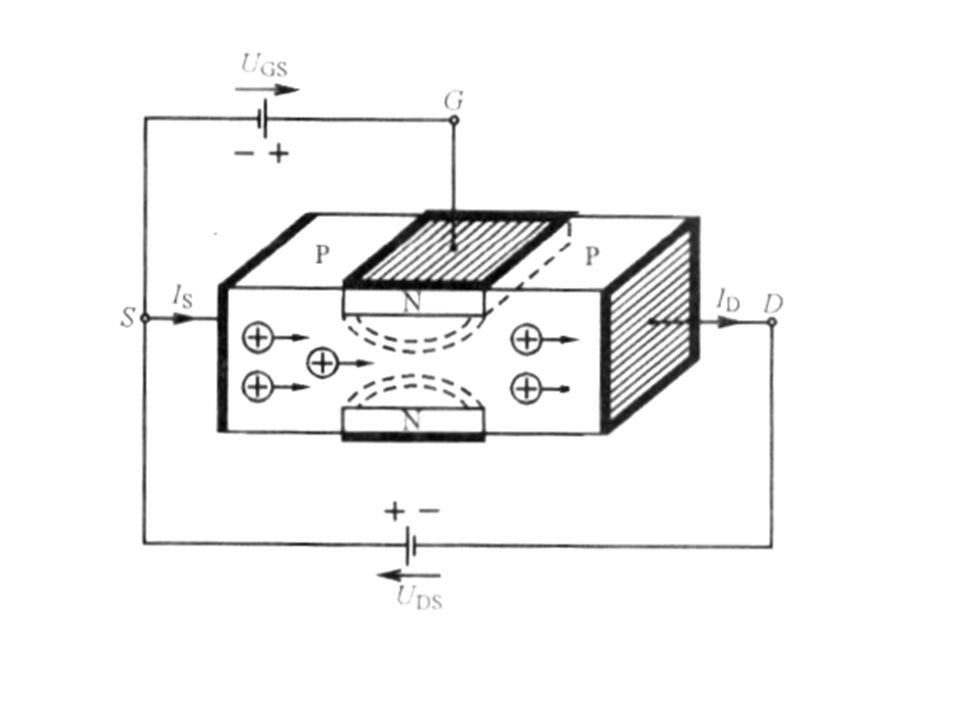
Tranzystor polowy Tranzystor polowy, tranzystor unipolarny, FET (ang. Field Effect Transistor) - tranzystor, w którym sterowanie prądem odbywa się za pomocą pola elektrycznego. Zasadniczą częścią tranzystora polowego jest kryształ odpowiednio domieszkowanego półprzewodnika z dwiema elektrodami: źródłem (symbol S od ang. source, odpowiednik emitera w tranzystorze bipolarnym) i drenem (D, drain, odpowiednik kolektora). Pomiędzy nimi tworzy się tzw. kanał, którym płynie prąd. Wzdłuż kanału umieszczona jest trzecia elektroda, zwana bramką (G, gate, odpowiednik bazy). W tranzystorach epiplanarnych, jak również w przypadku układów scalonych, w których wytwarza się wiele tranzystorów na wspólnym krysztale, wykorzystuje się jeszcze czwartą elektrodę, tzw. podłoże (B, bulk albo body), służącą do odpowiedniej polaryzacji podłoża.
 - tranzystor, w którym sterowanie prądem odbywa się za pomocą pola elektrycznego. Zasadniczą częścią tranzystora polowego jest kryształ odpowiednio domieszkowanego półprzewodnika z dwiema elektrodami: źródłem (symbol S od ang. source, odpowiednik emitera w tranzystorze bipolarnym) i drenem (D, drain, odpowiednik kolektora). Pomiędzy nimi tworzy się tzw. kanał, którym płynie prąd. Wzdłuż kanału umieszczona jest trzecia elektroda, zwana bramką (G, gate, odpowiednik bazy). W tranzystorach epiplanarnych, jak również w przypadku układów scalonych, w których wytwarza się wiele tranzystorów na wspólnym krysztale, wykorzystuje się jeszcze czwartą elektrodę, tzw. podłoże (B, bulk albo body), służącą do odpowiedniej polaryzacji podłoża.")
25
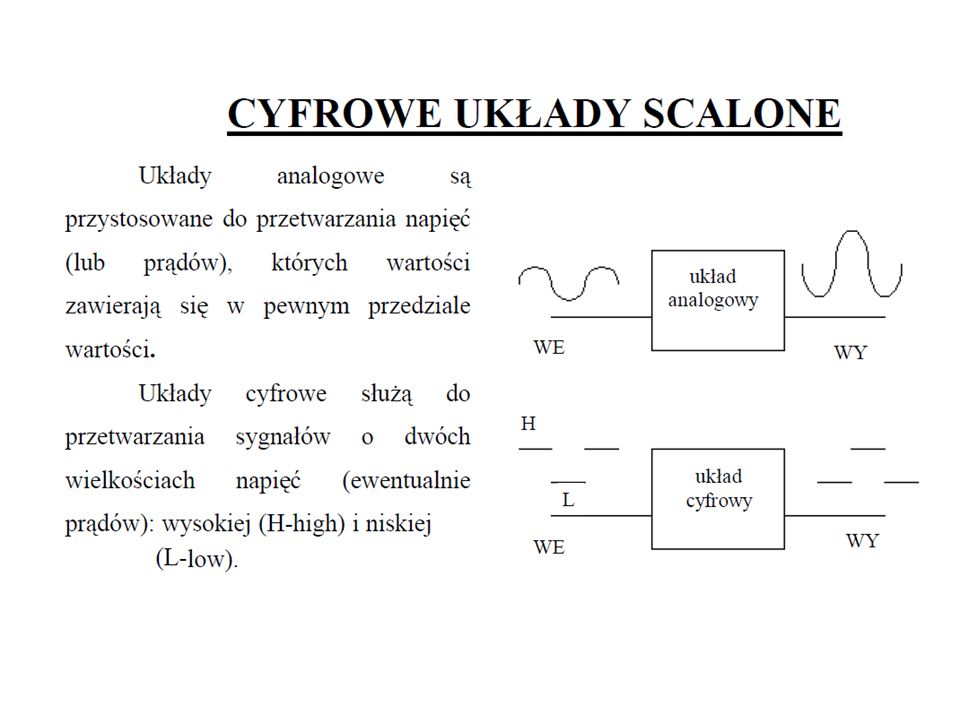
Sygnał cyfrowy – sygnał, którego dziedzina i zbiór wartości są dyskretne.
Współcześnie telekomunikacja i elektronika powszechnego użytku prawie całkowicie zostały zdominowane przez cyfrowe przetwarzanie sygnałów, które jest powtarzalne, bardziej niezawodne i tańsze od przetwarzania analogowego.

29
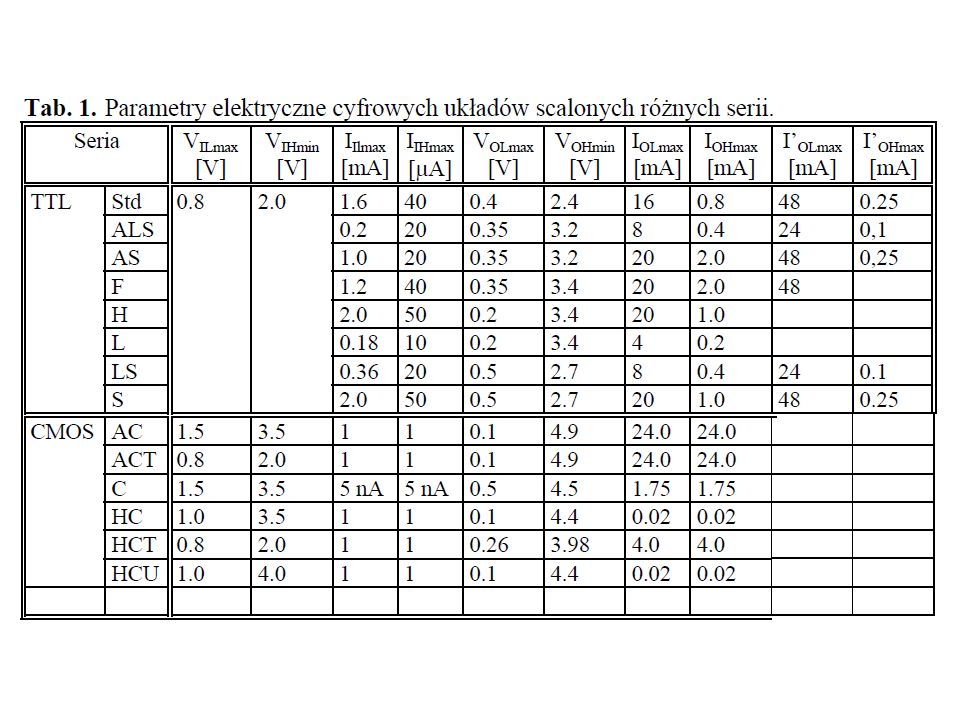
Elektronika cyfrowa jest dziedziną elektroniki zajmującą się wytwarzaniem i przetwarzaniem sygnałów cyfrowych przy użyciu układów cyfrowych. Obecnie najczęściej stosowane są układy półprzewodnikowe TTL (ang. transistor-transistor logic) oraz CMOS (ang. complementary metal-oxide-semiconductor). W elektronice cyfrowej stosuje się algebrę Boole'a czyli tzw. logikę zero-jedynkową, dzięki czemu uzyskuje się znaczne uproszczenie sprzętu elektronicznego (gdyż sygnał reprezentowany jest tylko przez jeden z poziomów logicznych: 0 lub 1).
 oraz CMOS (ang. complementary metal-oxide-semiconductor). W elektronice cyfrowej stosuje się algebrę Boole a czyli tzw. logikę zero-jedynkową, dzięki czemu uzyskuje się znaczne uproszczenie sprzętu elektronicznego (gdyż sygnał reprezentowany jest tylko przez jeden z poziomów logicznych: 0 lub 1).")
30
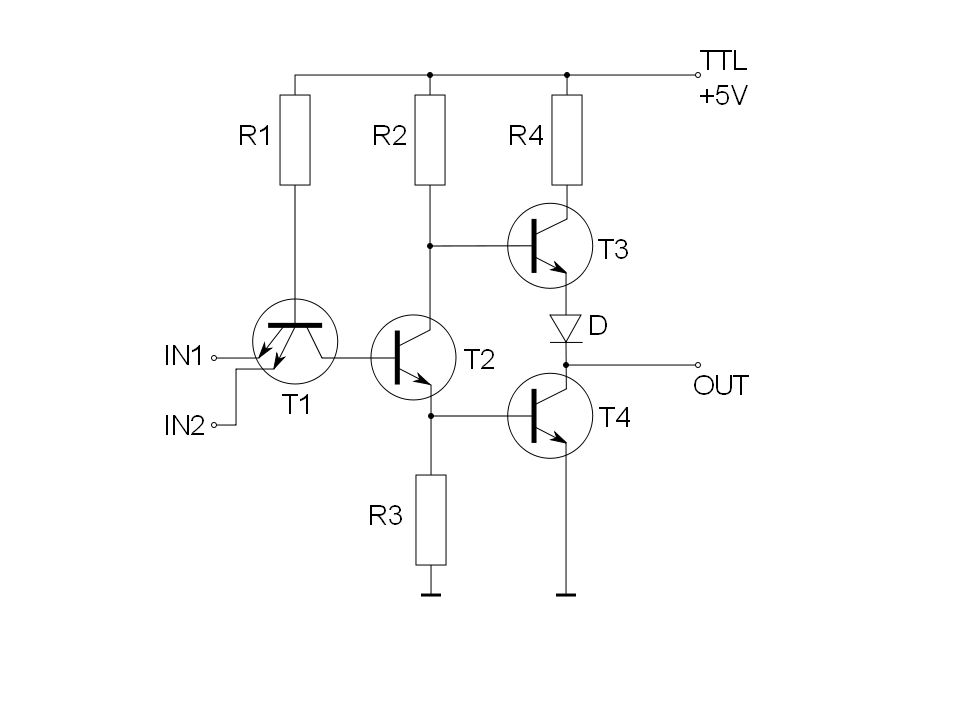
TTL Zapoczątkowana przez Texas Instruments w 1961 w rodzinie 7400 TTL była pierwszą techniką masowej produkcji układów scalonych, i nadal jest w szerokim użyciu. Układy TTL zbudowane są z tranzystorów bipolarnych i zasila się je napięciem stałym 5 V. Działają w logice dodatniej - sygnał TTL jest niski (logiczne "0"), gdy potencjał ma wartość od 0 V do 0,8 V w odniesieniu do masy, wysoki (logiczna "1") przy wartości potencjału między 2 V a 5 V. Wyróżnia się kilka odmian oznaczonych odpowiednio literami: * L (Low power) – wersja o małym poborze mocy (10 razy mniejszy niż TTL), ale wolniejsza od standardowej (10 MHz); nigdy nie zyskała popularności, gdyż została niemal natychmiast zastąpiona układami CMOS serii 4000. * H (High speed) – wersja szybsza od standardowej (58 MHz), ale o większym poborze mocy niż standardowa. Większą szybkość uzyskano przez zastosowanie 2x mniejszych rezystorów, co spowodowało szybsze przełączanie tranzystorów. * S (Schottky) – odmiana szybka (125 MHz), której tranzystory zawierają dodatkową diodę Schottky'ego włączoną równolegle do złącza kolektor-baza i zabezpieczającą tranzystor przed nasyceniem co powoduje dużo szybsze przechodzenie tranzystora ze stanu przewodzenia do zatkania. * AS (Advanced Schottky) – ulepszona seria S, charakteryzuje się jeszcze większą szybkością działania. * LS (Low power Schottky) – wersja S o znacznie niższym poborze prądu (40 MHz), zbliżonym do standardowej bramki; główna seria układów TTL, stosowana w większości zastosowań. * ALS (Advanced Low power Schottky) – unowocześniona seria LS, z mniejszym poborem mocy. * F (Fast) – nowoczesna, najszybsza seria TTL (125 MHz).
, gdy potencjał ma wartość od 0 V do 0,8 V w odniesieniu do masy, wysoki (logiczna 1 ) przy wartości potencjału między 2 V a 5 V. Wyróżnia się kilka odmian oznaczonych odpowiednio literami: * L (Low power) – wersja o małym poborze mocy (10 razy mniejszy niż TTL), ale wolniejsza od standardowej (10 MHz); nigdy nie zyskała popularności, gdyż została niemal natychmiast zastąpiona układami CMOS serii * H (High speed) – wersja szybsza od standardowej (58 MHz), ale o większym poborze mocy niż standardowa. Większą szybkość uzyskano przez zastosowanie 2x mniejszych rezystorów, co spowodowało szybsze przełączanie tranzystorów. * S (Schottky) – odmiana szybka (125 MHz), której tranzystory zawierają dodatkową diodę Schottky ego włączoną równolegle do złącza kolektor-baza i zabezpieczającą tranzystor przed nasyceniem co powoduje dużo szybsze przechodzenie tranzystora ze stanu przewodzenia do zatkania. * AS (Advanced Schottky) – ulepszona seria S, charakteryzuje się jeszcze większą szybkością działania. * LS (Low power Schottky) – wersja S o znacznie niższym poborze prądu (40 MHz), zbliżonym do standardowej bramki; główna seria układów TTL, stosowana w większości zastosowań. * ALS (Advanced Low power Schottky) – unowocześniona seria LS, z mniejszym poborem mocy. * F (Fast) – nowoczesna, najszybsza seria TTL (125 MHz).")
31
CMOS (ang. Complementary MOS) – technologia wytwarzania układów scalonych, głównie cyfrowych, składających się z tranzystorów MOS o przeciwnym typie przewodnictwa i połączonych w taki sposób, że w ustalonym stanie logicznym przewodzi tylko jeden z nich. Dzięki temu układ statystycznie nie pobiera żadnej mocy (pomijając niewielki prąd wyłączenia tranzystora), a prąd ze źródła zasilania płynie tylko w momencie przełączania – gdy przez bardzo krótką chwilę przewodzą jednocześnie oba tranzystory. Tracona w układach CMOS moc wzrasta wraz z częstotliwością przełączania, co wiąże się z przeładowywaniem wszystkich pojemności, szczególnie pojemności obciążających wyjścia. Układy CMOS są relatywnie proste i tanie w produkcji umożliwiając uzyskanie bardzo dużych gęstości upakowania tranzystorów na jednostce powierzchni płytki krzemu. Obwody CMOS zostały wynalezione w 1963 przez Franka Wanlassa z firmy Fairchild Semiconductor. Pierwszy układ scalony wykonany w technologii CMOS powstał w firmie RCA w 1968 pod okiem Alberta Medwina. Oryginalnie układy CMOS stanowiły oszczędną alternatywę do energochłonnych układów TTL. Znikomy pobór mocy układów CMOS przy małych częstotliwościach przełączania stanowił atut zwłaszcza w układach zegarów przemysłowych oraz wszędzie tam, gdzie czas pracy z baterii był istotniejszy niż szybkość działania. Z czasem poprawiono także parametry dynamiczne i po 25 latach układy CMOS zdominowały elektronikę cyfrową.

32
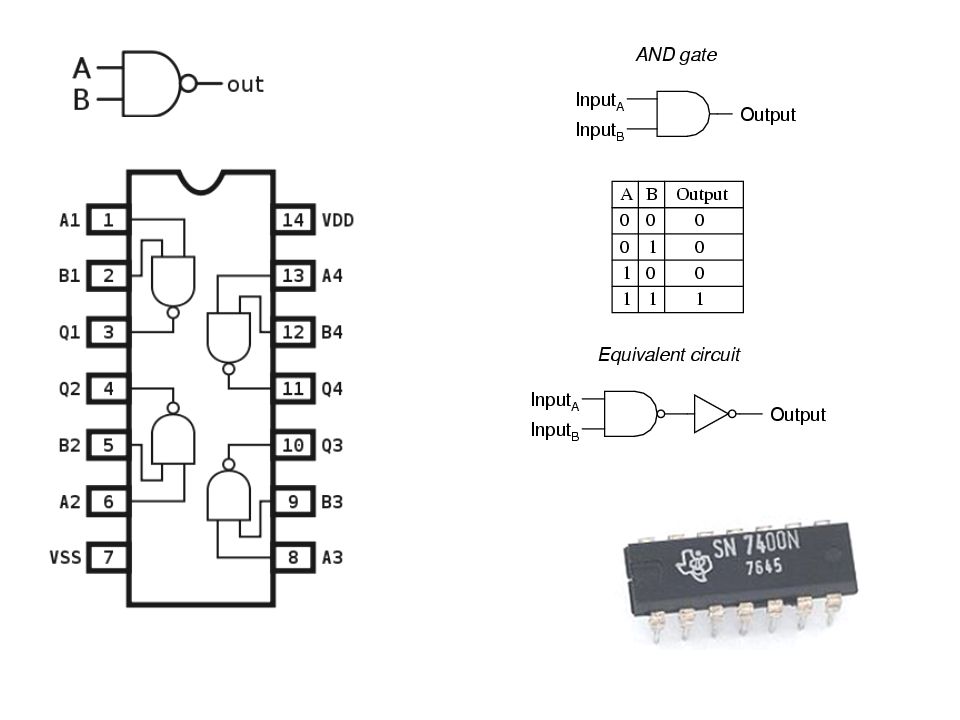
Bramka logiczna Bramka logiczna - element realizujący pewną prostą funkcję logiczną, której argumenty (zmienne logiczne) oraz sama funkcja mogą przybierać jedną z dwóch wartości, np. 0 lub 1.
 oraz sama funkcja mogą przybierać jedną z dwóch wartości, np. 0 lub 1.")
33
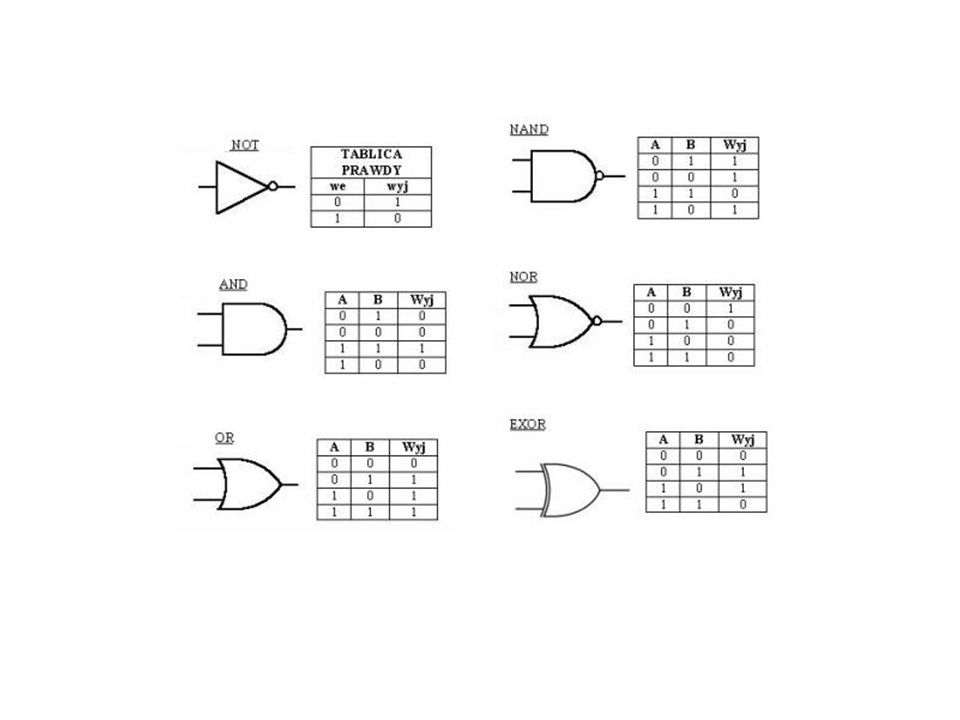
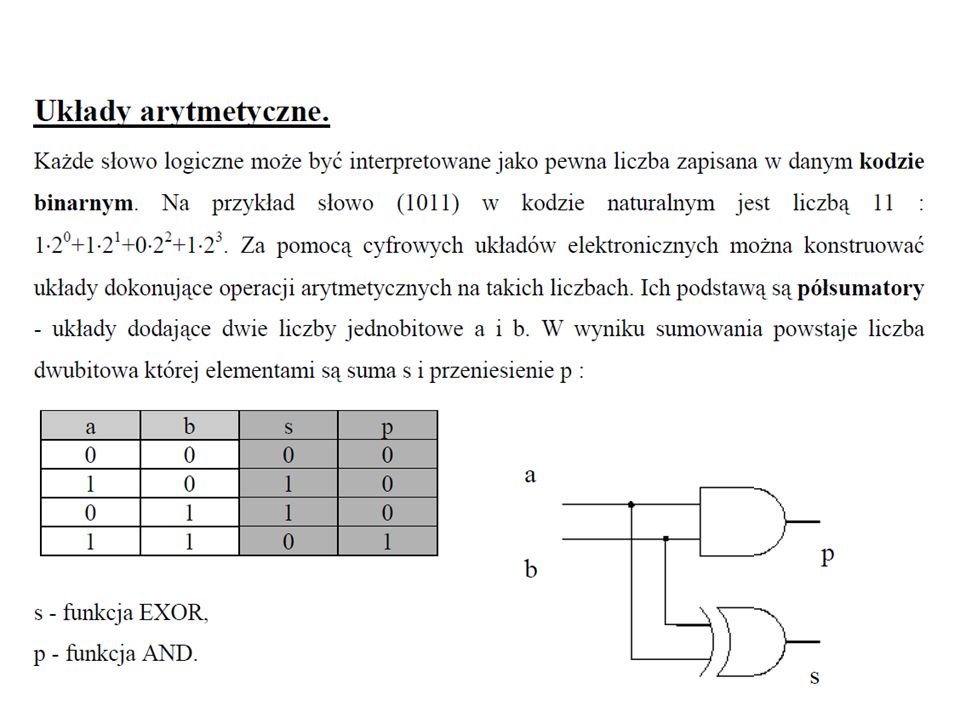
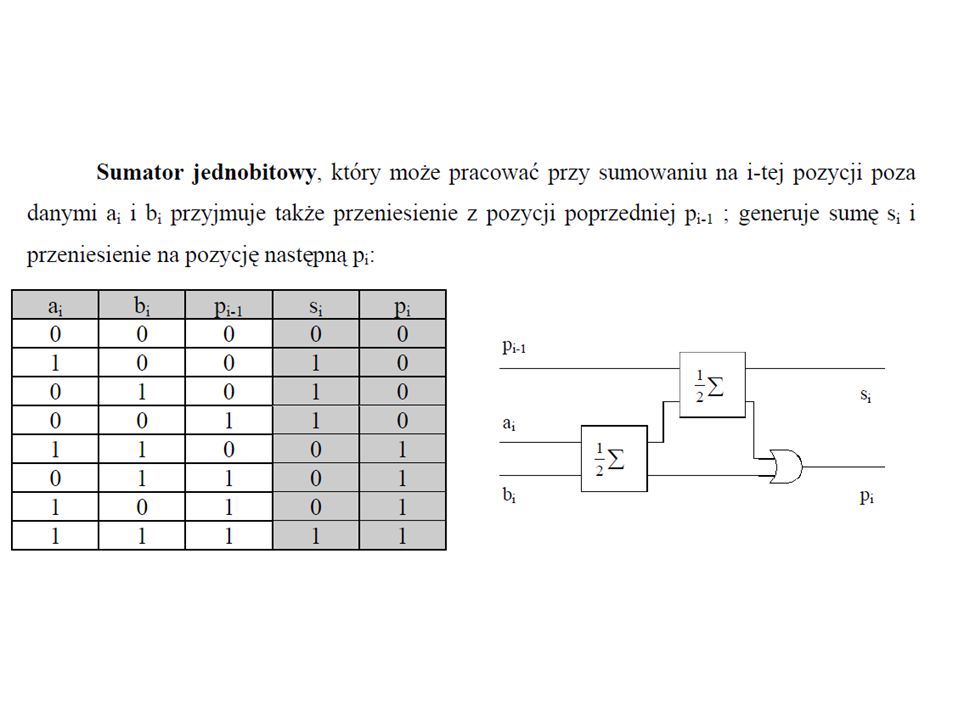
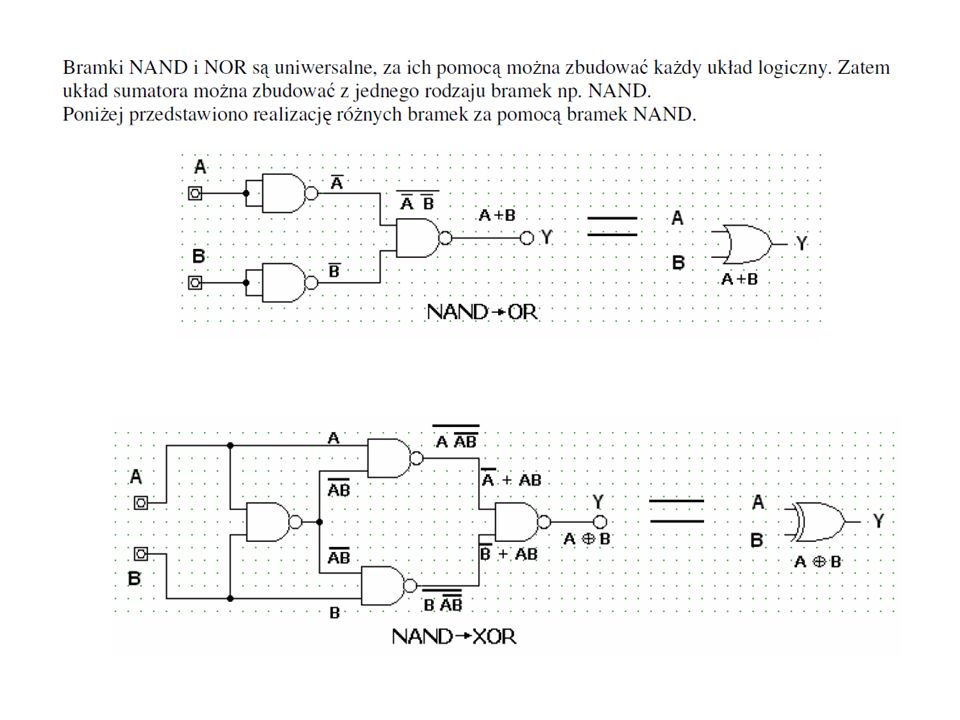
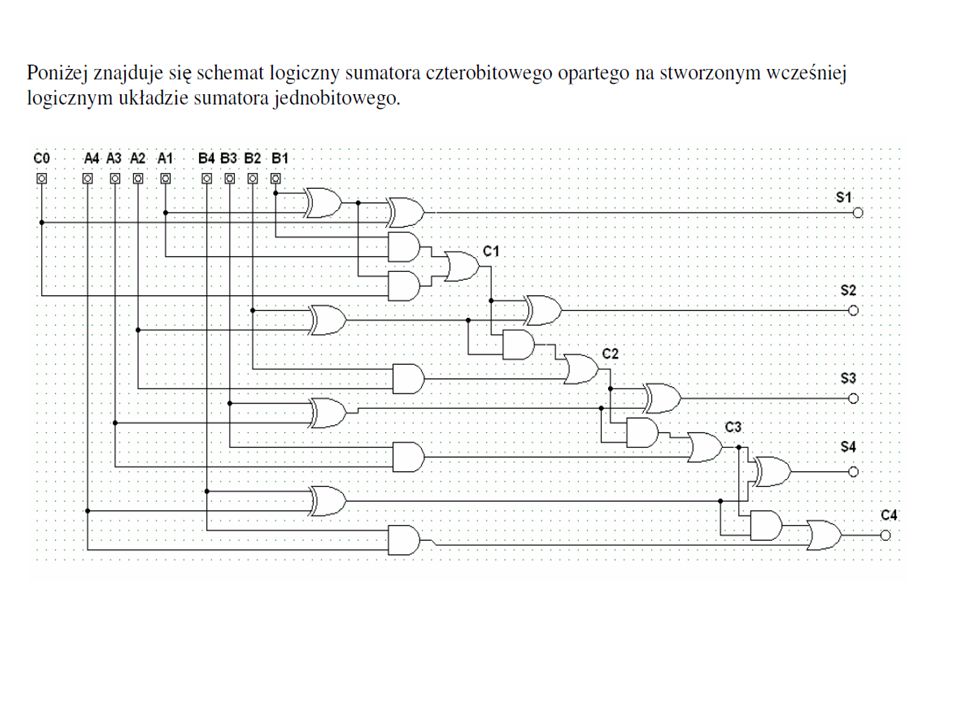
Podstawowymi elementami logicznymi, stosowanymi powszechnie w budowie układów logicznych, są elementy realizujące funkcje logiczne: sumy (alternatywy), iloczynu (koniunkcji) i negacji. Są to odpowiednio bramki OR, AND i NOT. Za pomocą dwóch takich bramek (np. OR i NOT lub AND i NOT) można zbudować układ, realizujący dowolną funkcję logiczną. Bramki NAND (negacja koniunkcji), oraz NOR (negacja sumy logicznej) nazywa się funkcjonalnie pełnymi ponieważ przy ich użyciu (tzn. samych NAND lub samych NOR) można zbudować układ realizujący dowolną funkcję logiczną. Dowolną bramkę logiczną można też skonstruować za pomocą pary bramek, np. za pomocą OR i NOT lub AND i NOT. Układy takie nazywamy układami zupełnymi. Bramkę logiczną XOR często wykorzystujemy w układach arytmetyki takich jak sumatory czy subtraktory.
, oraz NOR (negacja sumy logicznej) nazywa się funkcjonalnie pełnymi ponieważ przy ich użyciu (tzn. samych NAND lub samych NOR) można zbudować układ realizujący dowolną funkcję logiczną. Dowolną bramkę logiczną można też skonstruować za pomocą pary bramek, np. za pomocą OR i NOT lub AND i NOT. Układy takie nazywamy układami zupełnymi. Bramkę logiczną XOR często wykorzystujemy w układach arytmetyki takich jak sumatory czy subtraktory.")
37
Parametry układów

39
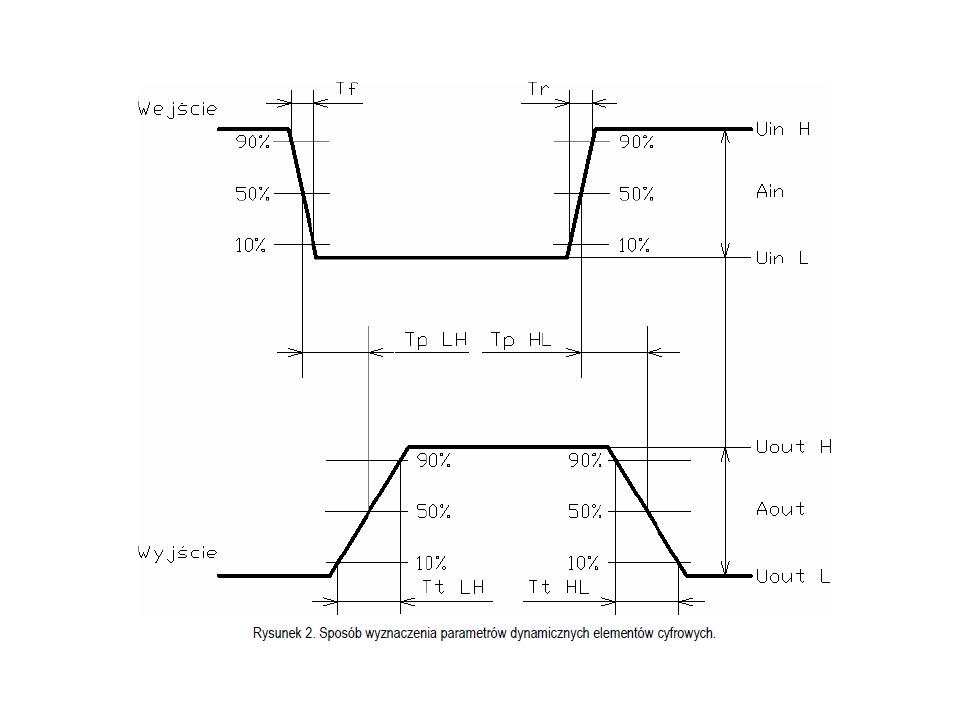
Parametry dynamiczne tpHL czas propagacji przy zmianie stanu logicznego na wyjściu z wysokiego (H) na niski (L), tj. czas upływający między występowaniem na wejściu i na wyjściu napięcia (UIHmin + UILmax)/2 przy zmianie stanu logicznego na wyjściu z H na L. tpLH czas propagacji przy zmianie stanu logicznego na wyjściu z niskiego (L) na wysoki (H), tj. czas upływający między występowaniem na wejściu i na wyjściu napięcia (UIHmin + UILmax)/2 przy zmianie stanu logicznego na wyjściu z L na H. tp czas propagacji, tj. średnia arytmetyczna czasów tpHL i tpLH lub niekiedy wartość większa spośród czasów tpHL i tpLH
 na niski (L), tj. czas upływający między występowaniem na wejściu i na wyjściu napięcia (UIHmin + UILmax)/2 przy zmianie stanu logicznego na wyjściu z H na L. tpLH czas propagacji przy zmianie stanu logicznego na wyjściu z niskiego (L) na wysoki (H), tj. czas upływający między występowaniem na wejściu i na wyjściu napięcia (UIHmin + UILmax)/2 przy zmianie stanu logicznego na wyjściu z L na H. tp czas propagacji, tj. średnia arytmetyczna czasów tpHL i tpLH lub niekiedy wartość większa spośród czasów tpHL i tpLH.")
40
D = tp Ps (wsp. dobroci) jest to iloczyn czasu propagacji tp i strat mocy Ps – dla danej klasy układów jest wielkością w przybliżeniu stałą. Służy do porównywania różnych serii układów cyfrowych. D = tp Ps jest to iloczyn czasu propagacji tp i strat mocy Ps – dla danej klasy układów jest wielkością w przybliżeniu stałą. Służy do porównywania różnych serii układów cyfrowych. Margines zakłóceń- Charakteryzuje odporność na zakłócenia. Jest to maksymalna wartość sygnału, która dodana do sygnału wejściowego elementu (pochodzącego z wyjścia poprzedniego elementu) nie spowoduje przekroczenia przez sygnał wyjściowy dopuszczanych granic. Obciążalność wyjścia układu cyfrowego jest to dopuszczalna liczba wejść innych elementów (tej samej lub określonej serii), które mogą być z tego wyjścia prawidłowo sterowane (tzn. bez przekroczenia katalogowych wartości prądów i napięć).
 nie spowoduje przekroczenia przez sygnał wyjściowy dopuszczanych granic. Obciążalność wyjścia układu cyfrowego jest to dopuszczalna liczba wejść innych elementów (tej samej lub określonej serii), które mogą być z tego wyjścia prawidłowo sterowane (tzn. bez przekroczenia katalogowych wartości prądów i napięć).")
42
TTL ECL PMOS NMOS CMOS Czas propagacji tp 3 – 33 1 – 2 35 – 300
ns 3 – 33 1 – 2 35 – 300 15 – 150 5 – 50 Straty mocy Ps mW 1 – 23 25 – 60 0,5 – 1,5 1 0, (f=1MHz) Współczynnik dobroci D = tpPs pJ 19 – 138 50 – 60 50 – 150 0, (f=1MHz) Margines zakłóceń DU V 0,2 0,7 – 1,5 0,3 UCC Częstotliwość fmax MHz 3 – 100 150 – 550 2 - 8 7 – 18 5 – 125 Liczba nap. zas. 2 – 3 1 – 3 2 – 6 Uzas 5 5% -5 – 2 3 - 18 Asortyment układowy bardzo duży średni mały LSI
 Współczynnik dobroci D = tpPs. pJ. 19 – – – , (f=1MHz) Margines zakłóceń DU. V. 0,2. 0,7 – 1,5. 0,3 UCC. Częstotliwość fmax. MHz. 3 – – – – 125. Liczba nap. zas. 2 – 3. 1 – 3. 2 – 6. Uzas. 5 5% -5 – Asortyment układowy. bardzo duży. średni. mały LSI.")
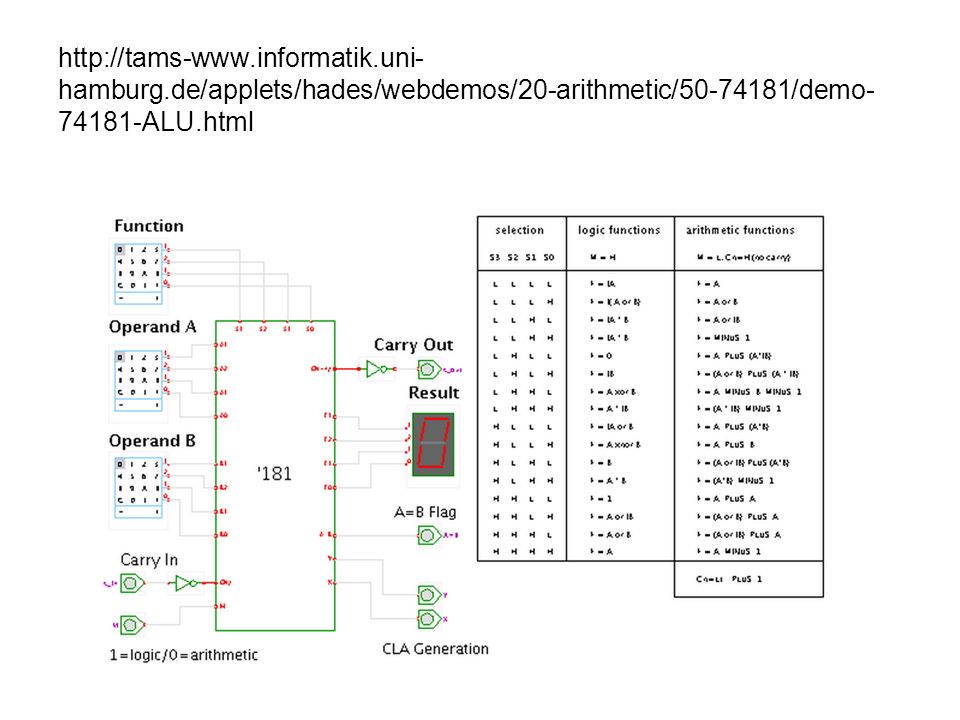
66
http://tams-www. informatik. uni-hamburg
73
Rejestr równoległy

74
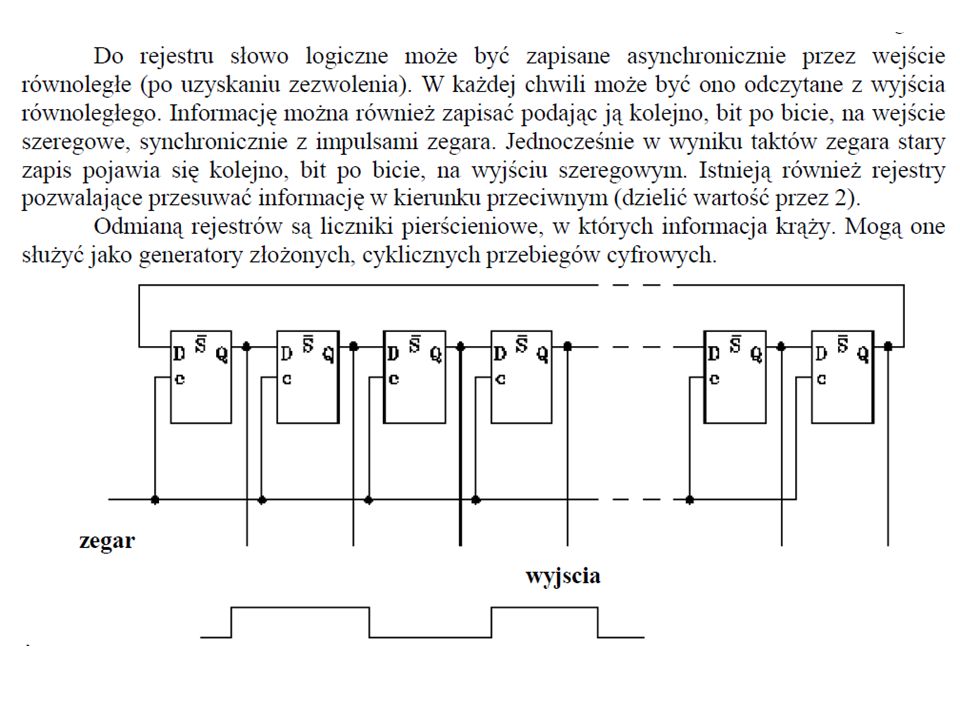
Rejestry podział Podział pod kątem odczytu/zapisu danych:
Równoległe – odczyt i zapis odbywa się równocześnie do wszystkich przerzutników rejestru, Szeregowe – informacje są wprowadzane kolejno do wejścia tylko jednego z przerzutników bit po bicie, odczyt analogiczny Szeregowo-równoległe – zapis odbywa się szeregowo, odczyt równolegle Równoległo-szeregowe – zapis równoległy, odczyt szeregowy Rejestry przesuwne

75
Stosowane oznaczenia rejestrów
PIPO – Paralel In Paralel Out SISO – Serial In Serial Out SIPO – Serial In Paralel Out PISO – Paralel In Serial Out

76
Parametry rejestrów Długość N – ilość przerzutników
Pojemność – 2N - ilość stanów Szybkość dla rej. równoległych czas zapisu/odczytu informacji dla rej. szeregowych szybkość powt. impulsów (max częstotliwość)
")
77
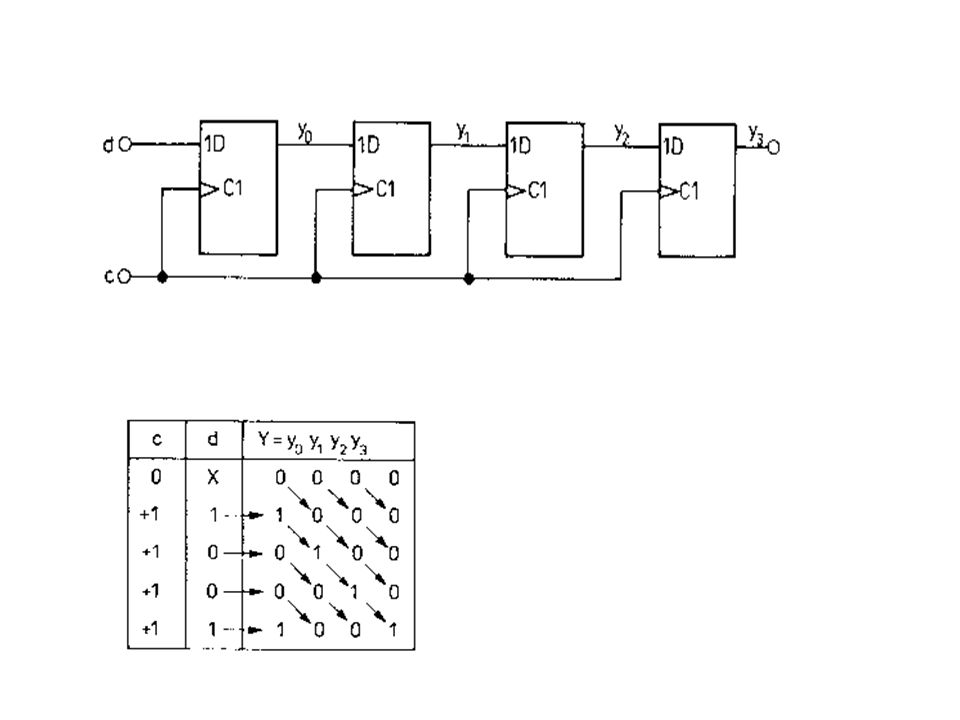
Rejestr szeregowy

79
Uniwersalny rejestr przesuwny 7495

80
Rejestry Zastosowania rejestrów: Dodatkowy podział rejestrów na
Komórki pamięciowe, buforowanie danych, Synchronizacja podsystemów pracujących z różnymi częstotliwościami zamiana sposobu przesyłu danych z równoległego na szeregowy i odwrotnie linie opóźniające Dodatkowy podział rejestrów na asynchroniczne synchroniczne (stosowane najczęściej)
")
81
Rejestr – bufor

82
Zastosowania w komp. PC Rejestry szeregowo-równoległe i równoległo-szeregowe wykorzystuje się w sterownikach USB, RS232, itp. Rejestry równoległe – port drukarki (Centronix)
")
83
Rejestry przesuwające - zastosowania
Układy mnożące/dzielące przez 2n n – o ile bitów nastąpiło przesunięcie Generowanie liczb pseudolosowych

84
Generator liczb losowych

85
Inne zastosowania Generowanie/sprawdzanie kontroli parzystości
Sumatory szeregowe Układy mnożące i dzielące przez 2N