Pobierz prezentację
2
Równania nadokreślone Zastosowanie macierzy

3
Carl Friedrich Gauss (30 kwietnia 1777 - 23 lutego 1855), niemiecki matematyk, fizyk, astronom i geodeta. Uznawany jest za jednego z twórców geometrii nieeuklidesowej. Uważany jest, obok Archimedesa i I. Newtona, za jednego z największych matematyków, przez sobie współczesnych określany był mianem księcia matematyków.

4
Rezultaty swoich badań astronomicznych zebrał w książce Theoria Motus Corporum Coelestium in Sectionibus Conicus Solem Ambietium (Teoria ciał niebieskich obiegających Słońce po orbitach stożkowych, 1809). Zaprezentował w niej między innymi wymyśloną przez siebie, jeszcze w okresie nauki w Brunszwiku, metodę najmniejszych kwadratów.

5
Spostrzeżenia nadliczbowe k – liczba niewiadomych n – liczba wykonanych pomiarów (spostrzeżeń) Jeżeli n > k to n - k oznacza liczbę spostrzeżeń nadliczbowych. Liczba warunków jakie muszą spełnić wykonane spostrzeżenia jest równa: r = n – k. Wyrównanie spostrzeżeń, obliczenie wartości niewiadomych, obliczenia kontrolne oraz ocena dokładności – możliwe są tylko wtedy, kiedy n > k

6
Ponieważ liczba spostrzeżeń n jest większa od liczby niewiadomych k, czyli n > k należy rozwiązać układ równań nadokreślony czyli taki, w którym jest więcej równań niż niewiadomych. Przykładem tego może być wyrównanie punktu węzłowego w niwelacji: w trzech równaniach występuje jedna niewiadoma X - wysokość punktu węzłowego.

7
Układ równań nadokreślonych z jedną niewiadomą L 1 + v 1 = x p 1 L 2 + v 2 = x p 2 L 3 + v 3 = x p 3 [pvv] = p 1 v 1 2 + p 2 v 2 2 + p 3 v 3 2 [pvv] = min.
![Układ równań nadokreślonych z jedną niewiadomą L 1 + v 1 = x p 1 L 2 + v 2 = x p 2 L 3 + v 3 = x p 3 [pvv] = p 1 v p 2 v p 3 v 3 2 [pvv] = min.](http://images.slideplayer.pl/33/8767052/slides/slide_7.jpg "Układ równań nadokreślonych z jedną niewiadomą L 1 + v 1 = x p 1 L 2 + v 2 = x p 2 L 3 + v 3 = x p 3 [pvv] = p 1 v p 2 v p 3 v 3 2 [pvv] = min.")
8
dla spostrzeżeń niejednakowo dokładnych Jeżeli przyjmiemy, że wszystkie wagi są jednakowe i równe 1 – otrzymujemy: dla spostrzeżeń jednakowo dokładnych

9
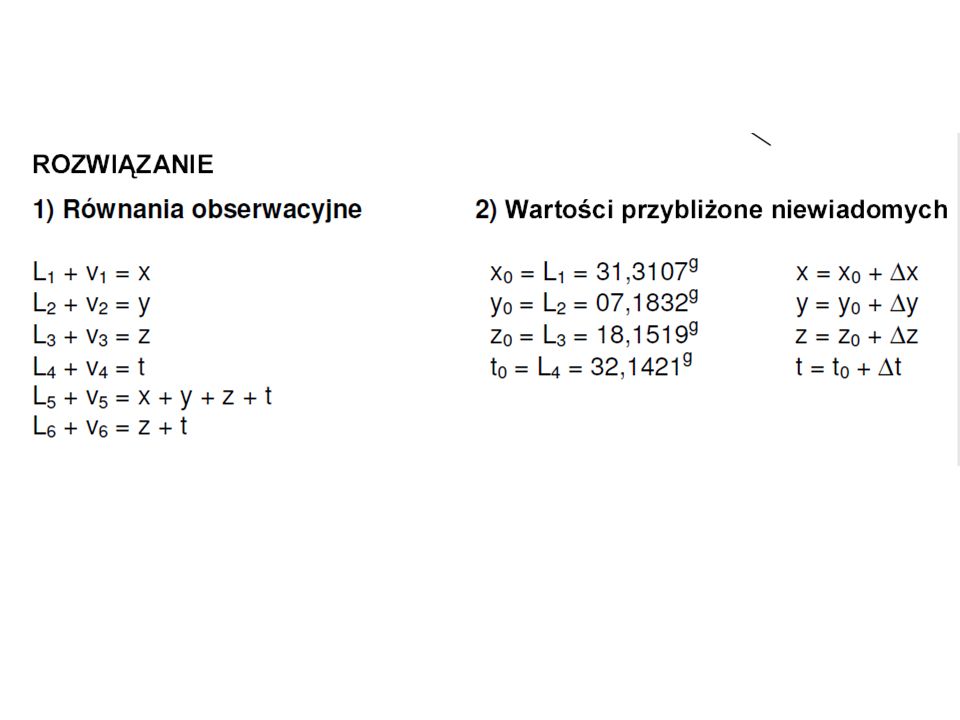
Równania obserwacyjne dla większej liczby niewiadomych:

10
Wyrównane niewiadome:

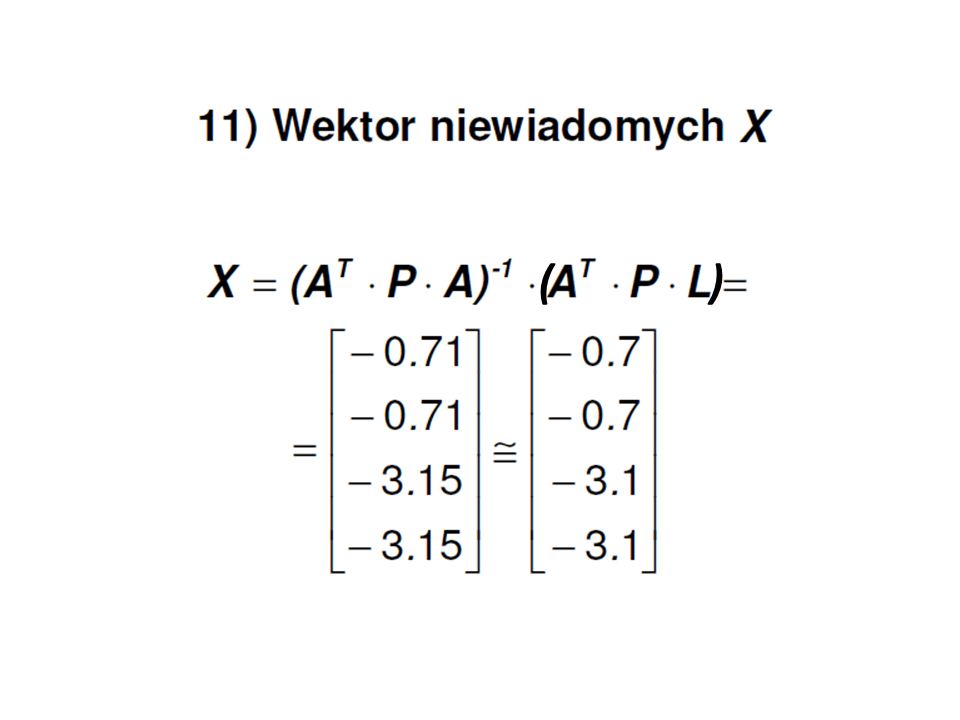
11
Rozwinięcie funkcji nieliniowej w szereg Taylora

12
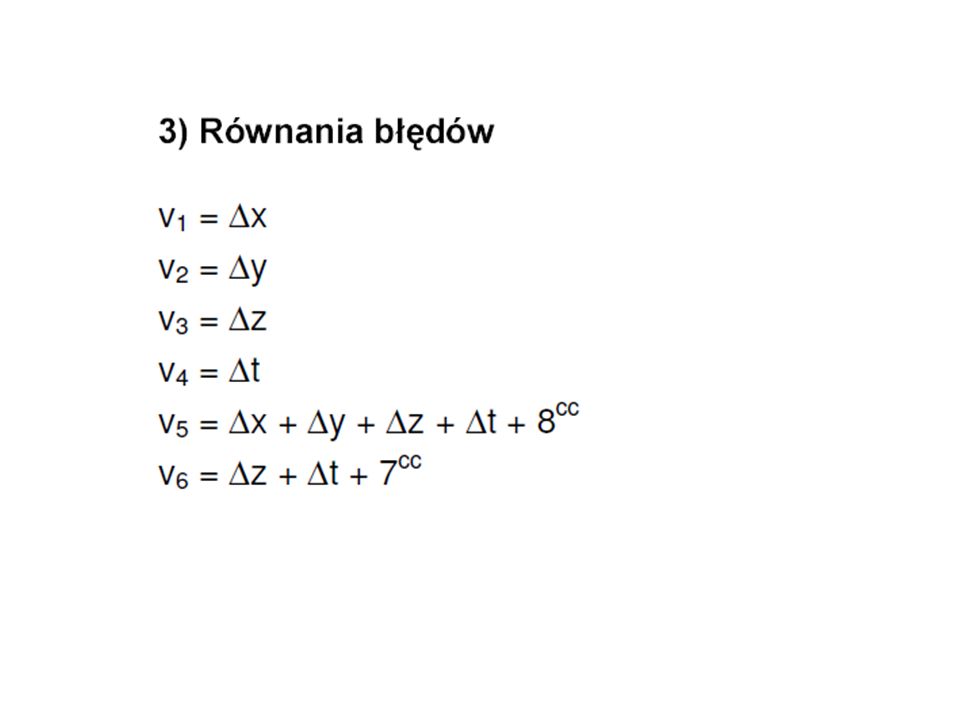
Równania błędów:

13
Wyprowadzenie wzorów dla metody najmniejszych kwadratów

14
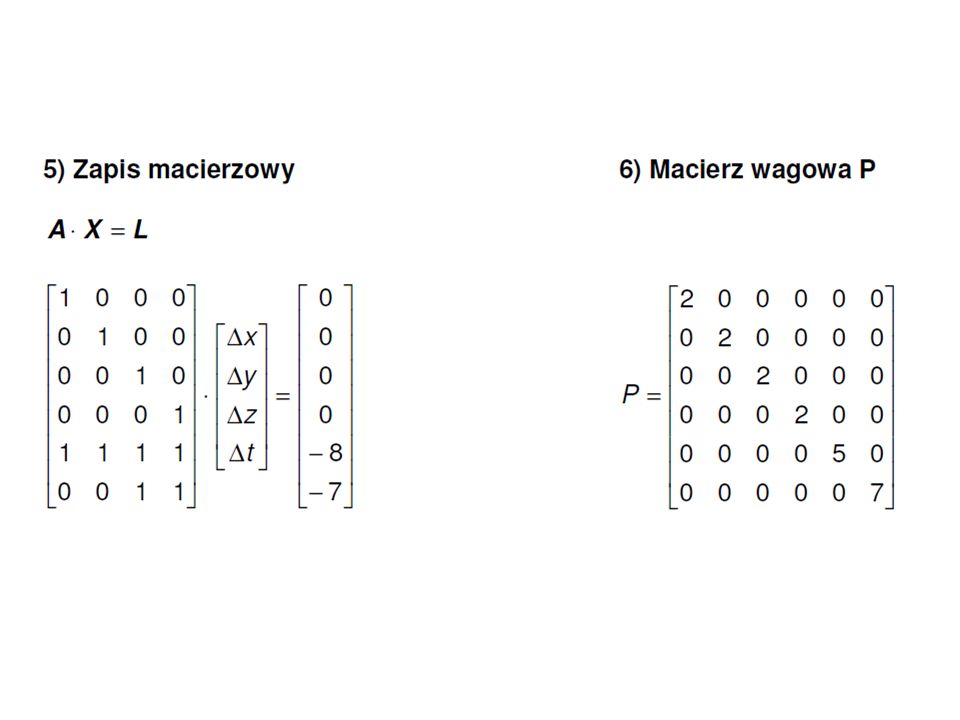
Zapis macierzowy: VA x L

15
Ausgleichungsrechnung I Gerhard Navratil v = Ax - l Dodatkowy warunek:

16
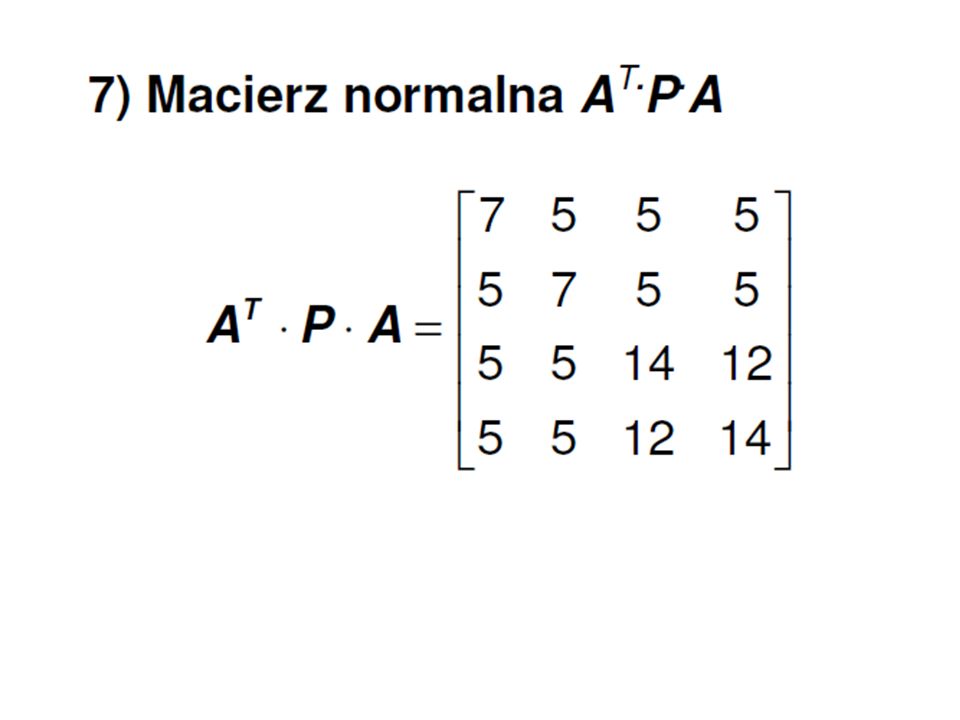
Macierzowy zapis równań:

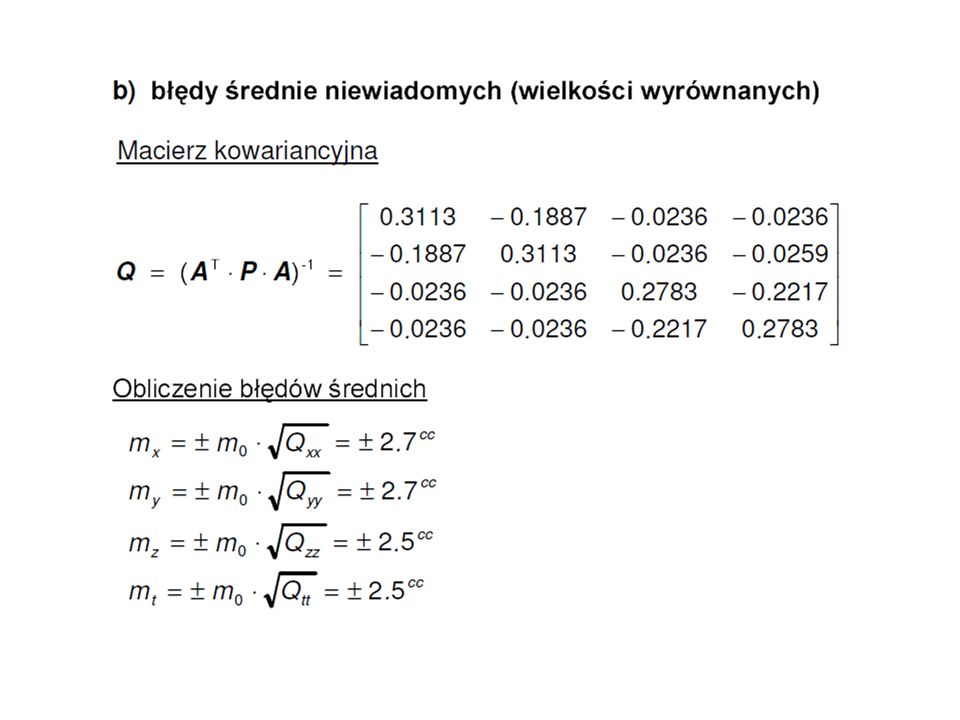
17
Rozwiązanie układu nadokreślonego

19
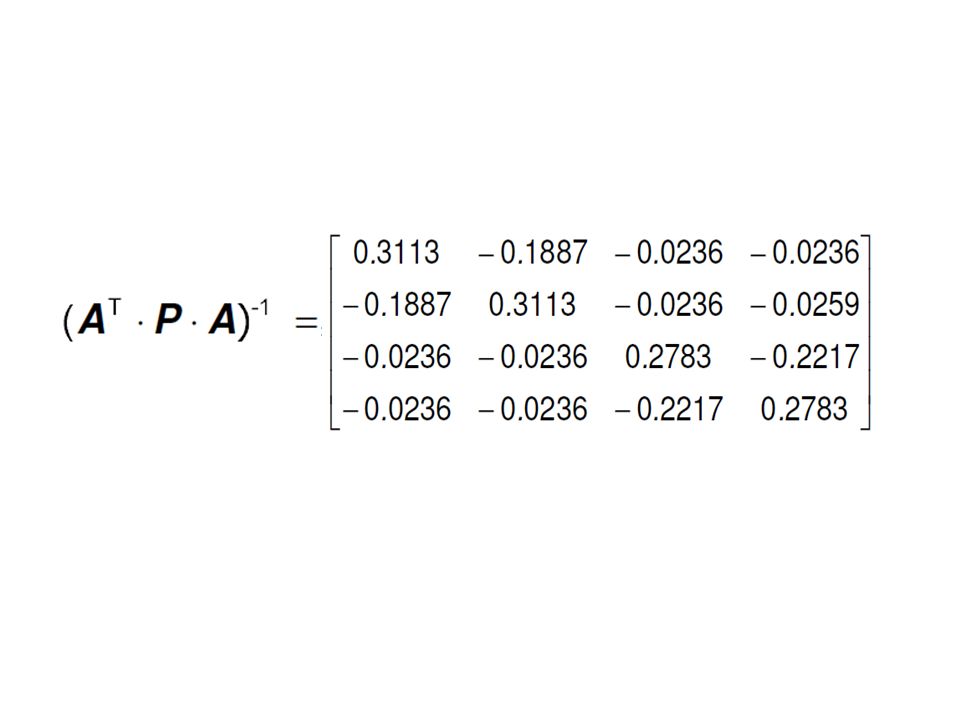
Obliczanie odwrotności macierzy normalnej: 1.Klasycznie – przez rozkład macierzy na czynniki trójkątne. 2.Wykorzystując funkcję MACIERZ.ODW z arkusza kalkulacyjnego. 3.W przypadku macierzy o wymiarach 2x2 – metodą uproszczoną

20
1. Rozkład macierzy na czynniki trójkątne

21
Obliczenie odwrotności macierzy trójkątnej

22
2. EXCEL: Obliczanie odwrotności macierzy: MACIERZ.ODW Macierz musi być kwadratowa żeby miała odwrotność. Macierz wynikowa ma takie same wymiary jak macierz odwracana.

23
Po zaznaczeniu obszaru wynikowego wywołujemy funkcję MACIERZ.ODW, wpisujemy nazwę macierzy odwracanej N, po czym naciskamy klawisze Ctrl+Shift+Enter

24
3. Obliczanie odwrotności macierzy o wymiarach 2 x 2

25
Przykład Nadokreślony układ równań: P1 P2 P3 P4 P5 P6 Nr X Y P1 2 2 P2 814 P3 8 2 P4 214 P5 1 7 P61311

26
Równanie prostej: P1-P2: -12x P + 6y P + 12=0 P3-P4: -12x P - 6y P +108=0 P5-P6: -4x P + 12y P - 80=0

27
-12x P + 6y P + 12=0 -12x P - 6y P +108=0 -4x P + 12y P - 80=0

35
()
")