Pobierz prezentację
1
Wykład 12 Regulator dyskretny PID. Regulacja dyskretna.
Teoria sterowania Wykład 12 Regulator dyskretny PID. Regulacja dyskretna.

2
Regulator dyskretny PID
regulator analogowy Algorytm pozycyjny PID

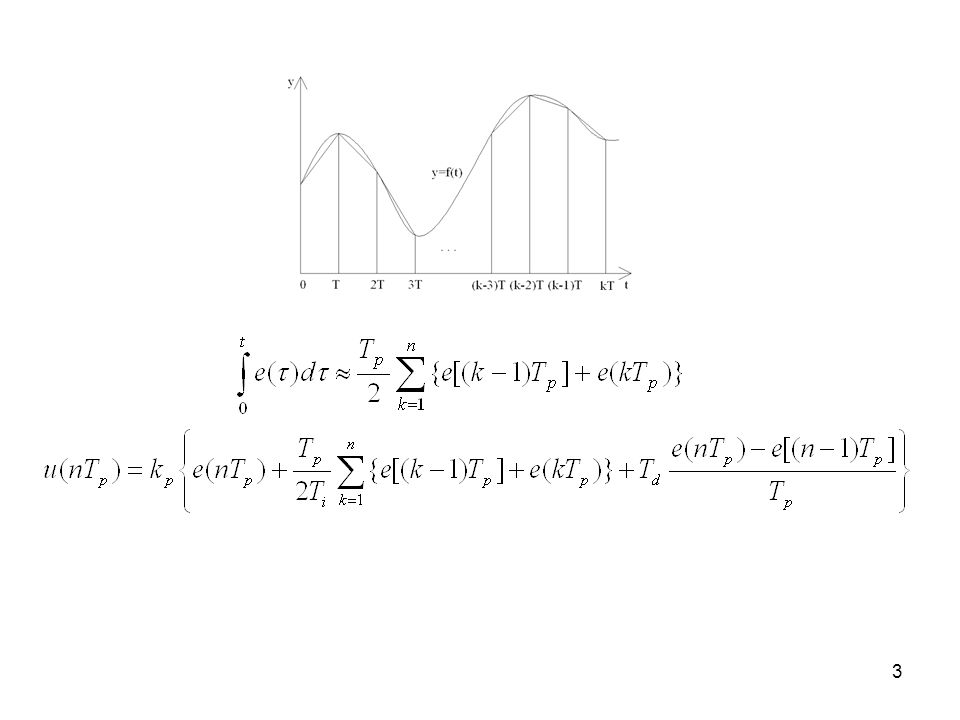
4
Algorytm przyrostowy PID

5
Schemat blokowy układu regulacji dyskretnej
Regulacja dyskretna Schemat blokowy układu regulacji dyskretnej Regulator wyznaczający ciąg sterujący u Przetwornik C/A Obiekt regulacji A/C w e –y u(n) u(t) y(t)
 u(t) y(t)")
6
Sygnały dyskretne: a) sygnał dyskretny w poziomie (skwantowany), b) sygnał dyskretny w czasie (spróbkowany), Tp – okres próbkowania. u t Tp 2Tp 3Tp 4Tp a) b) poziomy kwantowania
 b) poziomy kwantowania.")
7
Próbki błędu regulacji (a) i impulsy sterujące (b i c)
Tp 2Tp 3Tp u u(0) u(Tp) u(2Tp) u(3Tp) t e Tp 2Tp 3Tp e(0) e(Tp) e(2Tp) e(3Tp) a) b) c)
 u(Tp) u(2Tp) u(3Tp) t. e. 0 Tp 2Tp 3Tp. e(0) e(Tp) e(2Tp) e(3Tp) a) b) c)")
8
Skwantowany i spróbkowany sygnał błędu regulacji
Tp Tp Tp Tp Tp Tp t e(t) Poziomy kwantowania
 Poziomy. kwantowania.")
9
Zasady Zieglera - Nicholsa
W celu uzyskania w układzie automatycznej regulacji przebiegów z przeregulowaniem ok.20% i minimalnym czasem regulacji stosuje się przy doborze nastaw regulatora reguły podane przez Zieglera-Nicholsa. W myśl tych reguł należy najpierw niezależnie od typu regulatora uczynić z niego regulator typu P czyli w przypadku regulatora PID nastawić czas zdwojenia Ti = oraz czas wyprzedzenia Td = 0. Wzmocnienie regulatora kp należy nastawić na wartość minimalną a następnie zwiększać jego wartość, aż do chwili gdy w układzie pojawią się drgania o stałej amplitudzie. Należy odczytać wartość tego wzmocnienia kpkr zwanego wzmocnieniem krytycznym, przy którym wystąpiły drgania oraz okres tych drgań Tkr, zwany okresem krytycznym. Wg. reguł Zieglera-Nicholsa należy nastawić: dla regulatora PID dla regulatora PI dla regulatora P dla regulatora PI . dla regulatora P

10
h k t T0 tr 0,1k 0,9k Regulator P Regulator PI Regulator PID








>")





 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")




