Pobierz prezentację
1
Teoria sterowania Wykład 9 Transmitancja operatorowa i stabilność liniowych układu regulacji automatycznej

2
Transmitancja operatorowa układu regulacji automatycznej
Schemat blokowy układu regulacji Gr(s) Gob(s) z(t) w(t) y(t) u(t) e(t) _ + Gsp(s)
 Gob(s) z(t) w(t) y(t) u(t) e(t) _. + Gsp(s)")
3
Transmitancja operatorowa układu regulacji względem sygnału zadanego w(t)
Gr(s) Gob(s) w(t) u(t) e(t) _ + Gsp(s) y(t) y1(t)
 Gob(s) w(t) u(t) e(t) _. + Gsp(s) y(t) y1(t)")
4
Transmitancja operatorowa układu regulacji względem zakłócenia z(t)
Gr(s) Gob(s) z(t) u(t) -y1 Gsp(s) _ y(t) Gr(s) Gob(s) z(t) u(t) _ Gsp(s) y(t) u1(t) -y1(t)
 Gob(s) z(t) u(t) -y1. Gsp(s) _. y(t) Gr(s) Gob(s) z(t) u(t) _. Gsp(s) y(t) u1(t) -y1(t)")
5
(1) Zakładając i przekształcając równanie (1) wg. Laplace’a otrzymujemy (2) (3) (4)
 Zakładając i przekształcając równanie (1) wg. Laplace’a otrzymujemy (2) (3) (4)")
6
Transmitancja uchybowa układu regulacji
(5) Wielomian charakterystyczny (6)
 Wielomian charakterystyczny. (6)")
7
Stabilność liniowych układów regulacji automatycznej

8
(7) (8) (9) (10) (11) (12) Warunek stabilności: (13)
 (8) (9) (10) (11) (12) Warunek stabilności: (13)")
9
Metody wyznaczania odpowiedzi impulsowej i skokowej układu regulacji
Odpowiedzi skokowe

10
gw t gw t gw t

11
Badanie stabilności układu regulacji metodą przestrzeni fazowej

12
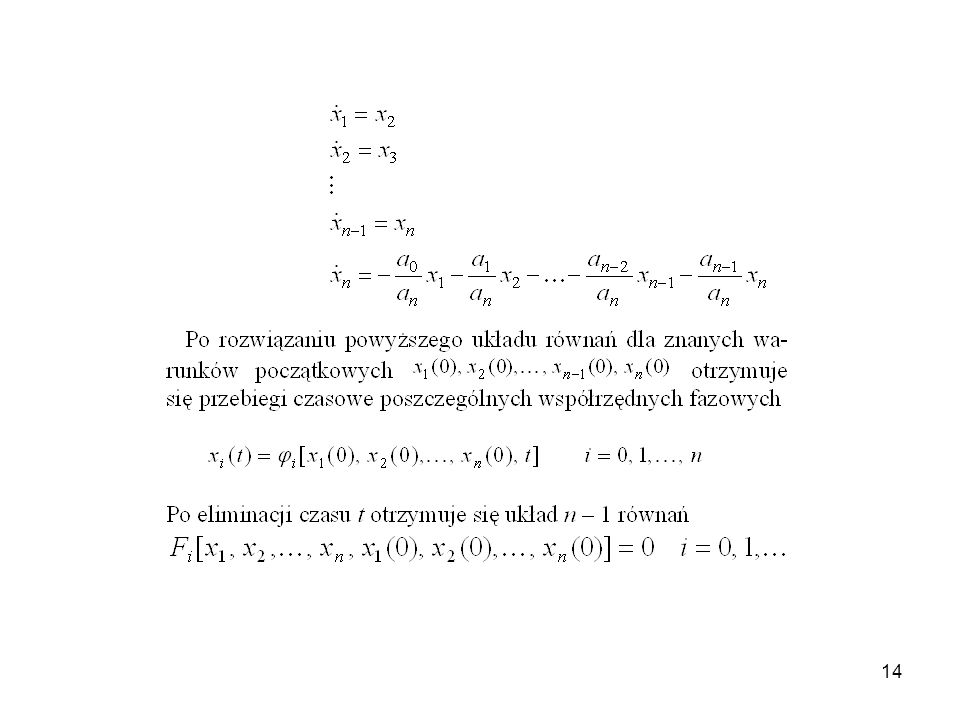
Jednowymiarowy nieliniowy układ w stanie swobodnym opisuje nieliniowe równanie różniczkowe:
(1) Wprowadzamy współrzędne fazowe: Stan dynamiczny układu w dowolnej chwili t określa wtedy wektor x(t) o składowych w przestrzeni zwanej przestrzenią fazową. Układ swobodny (1) znajduje się w stanie równowagi , jeżeli wszystkie pochodne są równe zeru. Odpowiadajacy temu punkt równowagi w przestrzeni fazowej umieszczamy w początku jej układu współrzędnych. Jeżeli , to początek układu współrzędnych nazywamy punktem stabilnym asymptotycznie. Jeżeli trajektoria x(t) przy t nie wychodzi poza pewien ograniczony obszar otaczający początek układu współrzędnych ,to układ jest stabilny w sensie Lapunowa.
 Wprowadzamy współrzędne fazowe: Stan dynamiczny układu w dowolnej chwili t określa wtedy wektor x(t) o składowych w przestrzeni zwanej przestrzenią fazową. Układ swobodny (1) znajduje się w stanie równowagi , jeżeli wszystkie pochodne są równe zeru. Odpowiadajacy temu punkt równowagi w przestrzeni fazowej umieszczamy w początku jej układu współrzędnych. Jeżeli. , to początek układu współrzędnych nazywamy punktem stabilnym asymptotycznie. Jeżeli trajektoria x(t) przy t nie wychodzi poza pewien ograniczony obszar otaczający początek układu współrzędnych ,to układ jest stabilny w sensie Lapunowa.")
16
Trajektoria fazowa przebiegu drgającego tłumionego (układ stabilny)
x1 = y x1 = y Trajektoria fazowa przebiegu drgającego z rosnącą amplitudą (układ niestabilny) Trajektoria fazowa przebiegu drgającego tłumionego (układ stabilny)
 Trajektoria fazowa przebiegu drgającego tłumionego (układ stabilny)")
17
Trajektoria fazowa przebiegu drgającego nietłumionego
x1 = y Trajektoria fazowa przebiegu drgającego nietłumionego Trajektorie fazowe przebiegów aperiodycznych: 1 – stabilnego, 2 – niestabilnego 1 2











 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji (c.d.)>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")



>")



