Pobierz prezentację
This is a modal window.
1
Kryteria stabilności i jakość układów regulacji automatycznej
Automatyka Wykład 10 Kryteria stabilności i jakość układów regulacji automatycznej

2
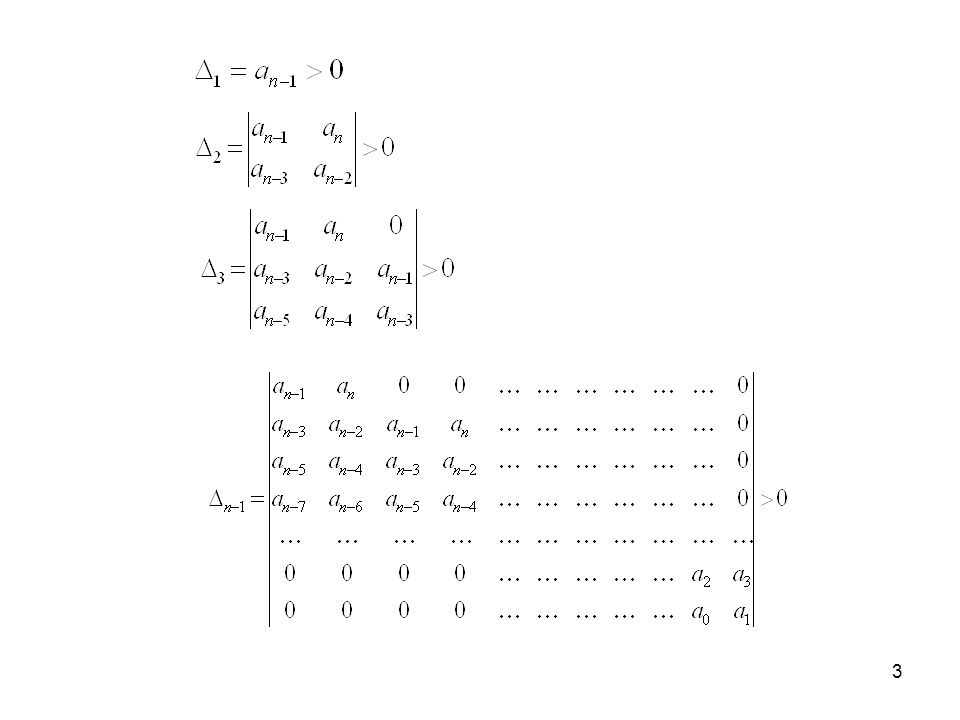
Kryterium stabilności Hurwitza

4
Równanie charakterystyczne układu ma postać
Przykład 1. Znaleźć na podstawie kryterium Hurwitza warunki stabilności dla układu trzeciego rzędu Rozwiązanie: Równanie charakterystyczne układu ma postać przy czym . Wyznacznik Hurwitza 3 musi być dodatni czyli

5
Z wyznacznika 3 wynikają następujące nierówności:
Warunek stabilności układu III rzędu

6
Kryterium stabilności Nyquista
_ G0(j) Układ zamknięty G0(j) Układ otwarty Warunek powstawania drgań
 Układ zamknięty. G0(j) Układ otwarty. Warunek powstawania drgań.")
7
Re [G0(j)] Im [G0(j)] = 0 = Układ zamknięty stabilny
niestabilny W układzie zamkniętym wystąpią drgania - = 0 = Re[G0] Im [G0] (-1,j0) g
![Re [G0(j)] Im [G0(j)] = 0 = Układ zamknięty stabilny](http://slideplayer.pl/slide/837748/2/images/7/Re+%5BG0%28j%EF%81%B7%29%5D+Im+%5BG0%28j%EF%81%B7%29%5D+%EF%81%B7+%3D+0+%EF%81%B7+%3D+%EF%82%A5+Uk%C5%82ad+zamkni%C4%99ty+stabilny.jpg "niestabilny. W układzie zamkniętym. wystąpią drgania. - = 0. = Re[G0] Im [G0] (-1,j0) g.")
8
Logarytmiczne kryterium Nyquista
- Lm0() 0() Lm g [dB] [ o]
 0() Lm. g. [dB] [ o]")
9
Lm = Lm0(-) = + 0(g) G0(j-π) 1 Im[G0] -π (–1, j0)
a) -π (–1, j0) 0 Re[G0] 1 g b) Lm0() [dB] g Lm Lm = Lm0(-) = + 0(g) 0() [ o]
![Lm = Lm0(-) = + 0(g) G0(j-π) 1 Im[G0] -π (–1, j0)](http://slideplayer.pl/slide/837748/2/images/9/%EF%81%84Lm+%3D+Lm0%28%EF%81%B7-%EF%81%B0%29+%EF%81%84%EF%81%AA+%3D+%EF%81%B0+%2B+%EF%81%AA0%28%EF%81%B7g%29+%EF%83%AAG0%28j%EF%81%B7-%CF%80%29+%EF%83%AA+%EF%81%84%EF%81%AA+1+Im%5BG0%5D+%EF%81%B7-%CF%80+%28%E2%80%931%2C+j0%29.jpg "a) -π. (–1, j0) 0. Re[G0] 1. g. b) Lm0() [dB] g. Lm. Lm = Lm0(-) = + 0(g) 0() [ o] ")
10
Jakość regulacji

11
Wskaźniki jakości regulacji
Dokładność statyczna (określona wartością uchybu ustalonego) Wskaźniki jakości związane z odpowiedzią skokową układu regulacji czas regulacji, czas narastania, maksymalne odchylenie dynamiczne, przeregulowanie. Wskaźniki jakości związane z charakterystyką częstotliwościową pasmo przenoszenia, zapas modułu, zapas fazy, Wskaźniki całkowe. zapas stabilności
 Wskaźniki jakości związane z odpowiedzią skokową układu regulacji. czas regulacji, czas narastania, maksymalne odchylenie dynamiczne, przeregulowanie. Wskaźniki jakości związane z charakterystyką częstotliwościową. pasmo przenoszenia, zapas modułu, zapas fazy, Wskaźniki całkowe. zapas stabilności.")
12
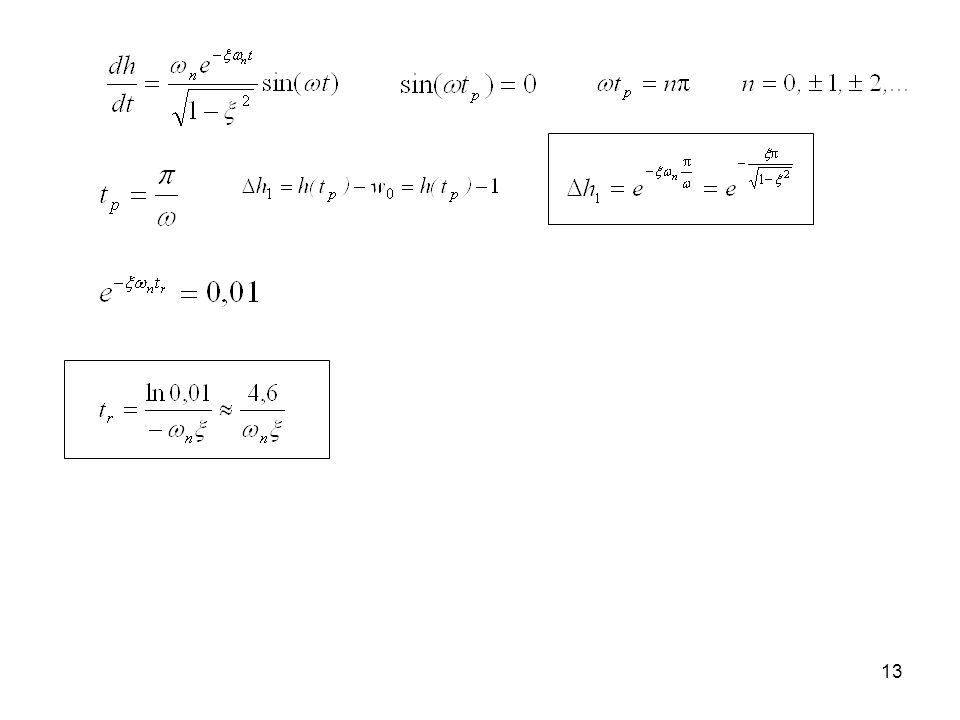
Przebieg oscylacyjny odpowiedzi skokowej
h h1 + w0=hust – t tp tr

14
Zapas stabilności (zapas modułu i zapas fazy) układu zamkniętego – wyznaczany na podstawie charakterystyki częstotliwościowej układu otwartego.
 układu zamkniętego – wyznaczany na podstawie charakterystyki częstotliwościowej układu otwartego.")
15
Schemat blokowy układu ze sprzężeniem zwrotnym
układ ze sprzężeniem zwrotnym układ bez sprzężenia zwrotnego [dB] Logarytmiczne charakterystyki amplitudowe: układu zamkniętego i układu bez sprzężenia zwrotnego _ + W(s) Y(s) ksp Schemat blokowy układu ze sprzężeniem zwrotnym Układ bez sprzężenia zwrotnego Układ ze sprzężeniem zwrotnym (układ zamknięty) Z charakterystyk przedstawionych na rysunku i obliczonych dla k = =104, ksp = 0,1 i T = 0,01 s wynika, że układ otwarty ma pasmo przenoszenia równe 100 rad/s i wzmocnienie w tym paśmie 104 (80 dB), natomiast układ zamknięty ma pasmo przenoszenia równe 105 rad/s i wzmocnienie równe 10 (20 dB). Dzięki wprowadzeniu sprzężenia zwrotnego uzyskujemy zwiększenie pasma przenoszenia i zmniejszenie wzmocnienia w porównaniu z układem bez sprzężenia zwrotnego.
 Y(s) ksp. Schemat blokowy układu ze sprzężeniem zwrotnym. Układ bez sprzężenia zwrotnego. Układ ze sprzężeniem zwrotnym (układ zamknięty) Z charakterystyk przedstawionych na rysunku i obliczonych dla k = =104, ksp = 0,1 i T = 0,01 s wynika, że układ otwarty ma pasmo przenoszenia równe 100 rad/s i wzmocnienie w tym paśmie 104 (80 dB), natomiast układ zamknięty ma pasmo przenoszenia równe 105 rad/s i wzmocnienie równe 10 (20 dB). Dzięki wprowadzeniu sprzężenia zwrotnego uzyskujemy zwiększenie pasma przenoszenia i zmniejszenie wzmocnienia w porównaniu z układem bez sprzężenia zwrotnego.")















 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")
 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")



