Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Siły bezwładności Poznaliśmy kilka sił występujących w przyrodzie.
Wszystkie te siły nazywamy siłami rzeczywistymi, ponieważ możemy je zawsze związać z jakimś konkretnym ciałem, możemy podać ich pochodzenie.

2
o takich siłach, jakich działania "doznajemy" np. przy przyspieszaniu,
Czy to samo możemy powiedzieć o takich siłach, jakich działania "doznajemy" np. przy przyspieszaniu, hamowaniu czy zakręcaniu samochodu?

3
Siła bezwładności nie jest zwykłą siłą. Właściwie można nawet
powiedzieć, że w ogóle nie jest siłą, bo nie wynika ona z żadnego oddziaływania między ciałami (a przecież siłę można definiować jako miarę oddziaływania). Jeszcze inaczej można by powiedzieć, że jest ona siłą pozorną. Siła bezwładności jest efektem wynikającym z samego przyspieszenia układu odniesienia.
. Jeszcze inaczej można by powiedzieć, że jest ona siłą pozorną. Siła bezwładności jest efektem wynikającym z samego. przyspieszenia układu odniesienia.")
4
Jeżeli układ odniesienia porusza się ruchem przyspieszonym
względem otoczenia, wtedy z jego poziomu ciała w tym otoczeniu też poruszają się ruchem przyspieszonym (tylko skierowanym przeciwnie). Wygląda to tak samo jakby działała na nie jakaś siła. I właśnie sztucznie przypisana temu ruchowi siła jest siłą bezwładności.
. Wygląda to tak samo jakby działała na nie jakaś siła. I właśnie sztucznie przypisana temu ruchowi siła jest. siłą bezwładności.")
5
Siła bezwładności pojawia się tylko
w nieinercjalnych układach odniesienia.

6
Siła bezwładności podczas ruszania pojazdu - gdy samochód
rusza do przodu siła bezwładności wciska pasażerów w fotel Siła bezwładności podczas hamowania pojazdu - gdy samochód (lub inny pojazd) nagle hamuje, wtedy siła bezwładności rzuca pasażerem do przodu
 nagle hamuje, wtedy siła bezwładności rzuca pasażerem. do przodu.")
7
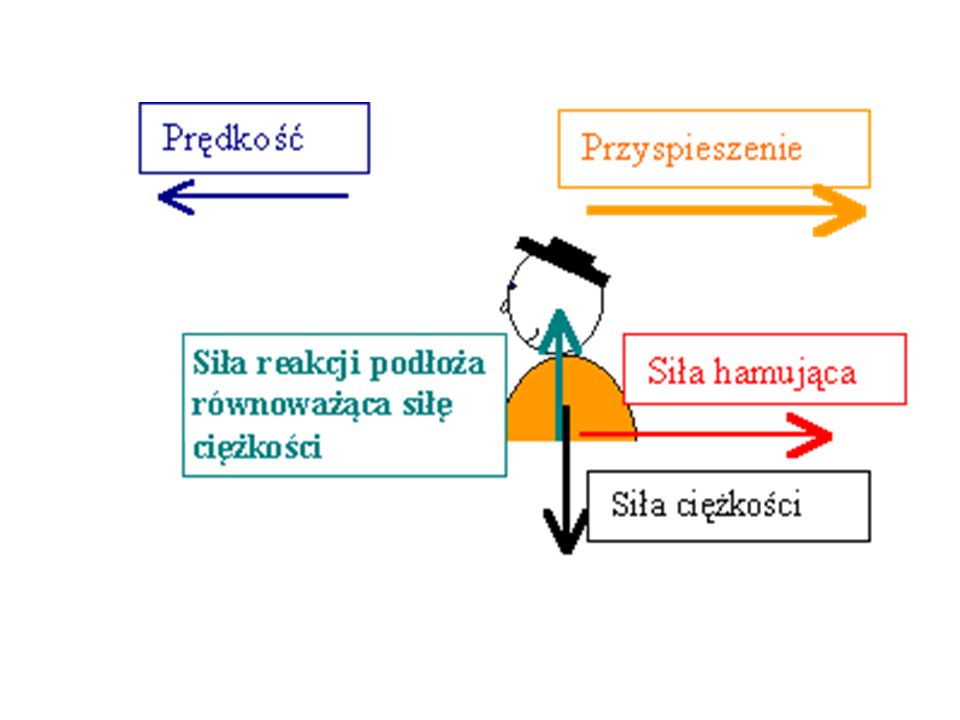
Przykład – hamujący samochód
Hamujący samochód podlega działaniu siły hamowania skierowanej przeciwnie do kierunku ruchu. W wyniku działania tej siły samochód uzyska przyspieszenie skierowane przeciwnie do prędkości.

8
W układzie inercjalnym widzimy sytuację z zewnątrz
(np. jako obserwator patrzący na samochód z chodnika). Widzimy, że samochód ma malejącą prędkość i przyspieszenie skierowane przeciwnie do tej prędkości. Można wyróżnić 3 siły działające na kierowcę: Siłę ciężkości Siłę reakcji podłoża równoważącą siłę ciężkości Siłę hamującą
. Widzimy, że samochód ma malejącą prędkość i przyspieszenie. skierowane przeciwnie do tej prędkości. Można wyróżnić 3 siły działające na kierowcę: Siłę ciężkości. Siłę reakcji podłoża równoważącą siłę ciężkości. Siłę hamującą.")
11
W układzie inercjalnym mamy siłę wypadkową równą
sile hamującej. Nadaje ona samochodowi i kierowcy opóźnienie (przyspieszenie skierowane przeciwnie do prędkości). II zasada dynamiki Newtona jest spełniona w tym układzie, bo różna od zera siła wypadkowa (F różne od zera), powoduje powstawanie różnego od zera przyspieszenia (opóźnienie hamowania - a jest różne od zera).
. II zasada dynamiki Newtona. jest spełniona w tym układzie, bo różna od zera siła wypadkowa (F różne od zera), powoduje. powstawanie różnego od zera przyspieszenia (opóźnienie. hamowania - a jest różne od zera).")
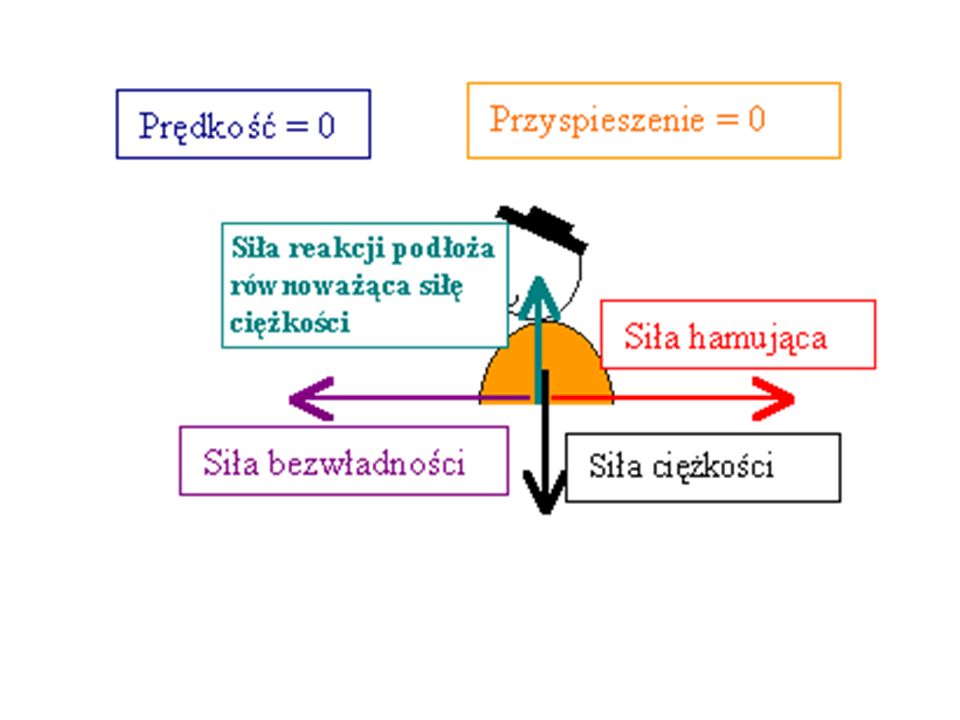
12
Opis tej samej sytuacji w układzie nieinercjalnym,
związanym z samochodem. W układzie nieinercjalnym związanym z samochodem sytuację widzimy jakby od środka (np. jako sam samochód). W tym układzie samochód i kierowca mają prędkość równą zero; przyspieszenie wypadkowe też wynosi zero (w końcu samochód nie porusza się względem jego kierowcy). Teraz mamy aż 4 siły działające na kierowcę – 3 siły wymienione poprzednio i jedna nowa – siła bezwładności: Siła ciężkości Siła reakcji podłoża równoważąca siłę ciężkości Siłę hamująca Dodatkowo występuje siła bezwładności równoważąca siłę hamującą
. W tym układzie. samochód i kierowca mają prędkość równą zero; przyspieszenie. wypadkowe też wynosi zero (w końcu samochód nie porusza się. względem jego kierowcy). Teraz mamy aż 4 siły działające na kierowcę – 3 siły wymienione. poprzednio i jedna nowa – siła bezwładności: Siła ciężkości. Siła reakcji podłoża równoważąca siłę ciężkości. Siłę hamująca. Dodatkowo występuje siła bezwładności równoważąca siłę. hamującą.")
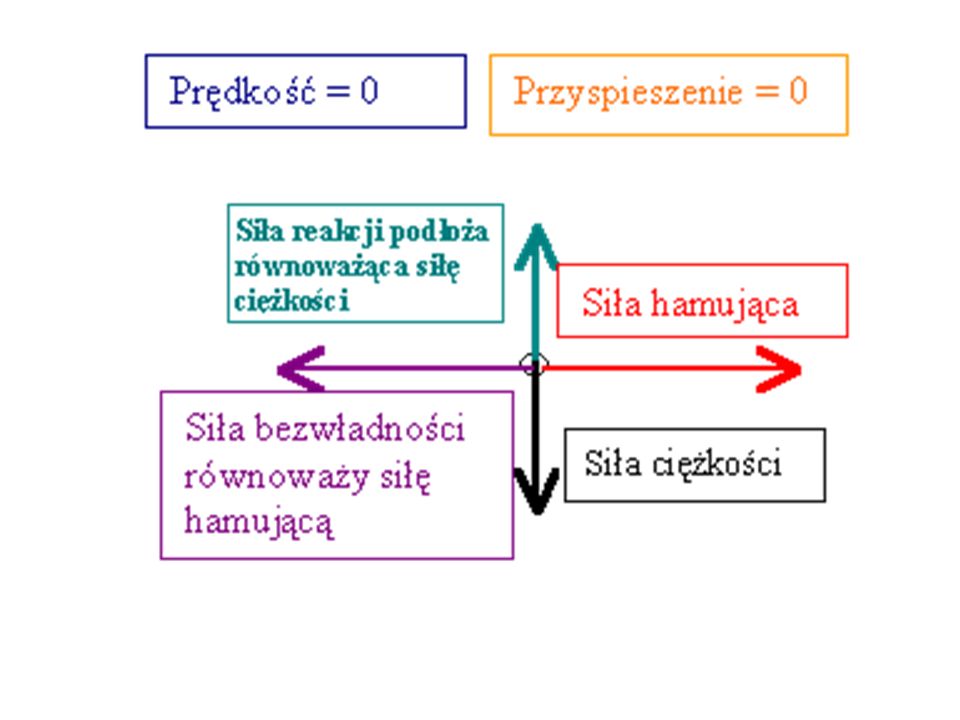
15
W układzie nieinercjalnym wszystkie działające siły
równoważą się. W szczególności siła bezwładności równoważy siłę hamującą. Mimo tego, że siły są inne niż poprzednio, to II zasada dynamiki dalej jest spełniona – bo wypadkowa siła jest równa zero, ale także przyspieszenie w układzie obserwatora jest równe zero. Czyli równanie II zasady dynamiki jest spełniona, jako że a = 0 i F = 0.

16
Dwaj obserwatorzy opisują ruch kulki w sytuacji pokazanej na rysunku.

17
Jeden z obserwatorów znajduje się w wózku
a drugi stoi na Ziemi. Wózek początkowo porusza się ze stałą prędkością po linii prostej (rys. 1), następnie hamuje ze stałym opóźnieniem a (rys. 2). Między kulką a wózkiem nie ma tarcia.
, następnie hamuje ze stałym. opóźnieniem a (rys. 2). Między kulką a wózkiem. nie ma tarcia.")
18
Gdy wózek jedzie ze stałą prędkością
To obydwaj obserwatorzy stwierdzają Zgodnie, na podstawie pierwszej zasady dynamiki, że na kulkę nie działa żadna siła. Zwróćmy uwagę, że obserwatorzy znajdują się w inercjalnych układach odniesienia.

19
Sytuacja zmienia się, gdy wózek zaczyna
hamować (rys. 2). Obserwator związany z Ziemią dalej twierdzi, że kulka porusza się ze stałą prędkością, a tylko podłoga wózka przesuwa się pod nim. Natomiast obserwator w wózku stwierdza, że kulka zaczyna się poruszać się z przyspieszeniem –a w stronę przedniej ściany wózka.
. Obserwator związany. z Ziemią dalej twierdzi, że kulka porusza. się ze stałą prędkością, a tylko podłoga wózka. przesuwa się pod nim. Natomiast obserwator. w wózku stwierdza, że kulka zaczyna. się poruszać się z przyspieszeniem –a. w stronę przedniej ściany wózka.")
20
Dochodzi do wniosku, że na kulkę o masie mk
Zaczęła działać siła F1 = ‑ mka ale nie może wskazać żadnego ciała, będącego źródłem tej siły.

21
Druga zasada dynamiki jest słuszna tylko
w inercjalnym układzie odniesienia, a obserwator w wózku znajduje się (2) w układzie nieinercjalnym, nie istnieje rzeczywista siła F1. Jest to tak zwana pozorna siła bezwładności.
 w układzie nieinercjalnym, nie istnieje. rzeczywista siła F1. Jest to tak zwana. pozorna siła bezwładności.")
22
Pytanie: jak postępować, gdy musimy rozwiązać
problem w układzie nieinercjalnym? W tym celu rozpatrzmy dalszy ruch kulki. Gdy dotrze ona do przedniej ścianki, wówczas według obserwatora na Ziemi (układ inercjalny) będzie poruszać się z przyspieszeniem a (takim jak wózek), bo działa na nią siła Fs sprężystości przedniej ściany wózka równa Fs = mka
 będzie poruszać się z przyspieszeniem a (takim. jak wózek), bo działa na nią siła Fs sprężystości. przedniej ściany wózka równa. Fs = mka.")
23
Natomiast obserwator w wózku stwierdza, że kulka
przestała się poruszać; spoczywa względem niego. Jego zdaniem siła sprężystości ściany Fs równoważy siłę F1, tak, że siła wypadkowa jest równa zeru i kulka nie porusza się Fs + F1 = 0 po podstawieniu F1 = ‑ mka otrzymujemy Fs = mka

24
Wynik otrzymany przez obserwatora w układzie
nieinercjalnym jest taki sam jak dla obserwatora związanego z Ziemią, ale przy uwzględnieniu sił pozornych.

25
Siły te "znikają", jeśli rozpatrujemy ruch
z punktu widzenia układu inercjalnego. Wprowadzenie ich pozwala po prostu na stosowanie mechaniki klasycznej do opisu zdarzeń w układach poruszających się z przyspieszeniem. W takim układzie uwzględniamy, że na każde ciało działa siła wprost proporcjonalna do masy tego ciała, do przyspieszenia układu a i jest skierowana przeciwnie do a.

26
Uwzględnienie sił bezwładności jest konieczne, jeżeli
chcemy stosować zasady dynamiki w układach nieinercjalnych.

27
F = ma Rozważmy ruch jednostajny po okręgu z punktu widzenia
dynamiki. Zgodnie z I zasadą dynamiki tylko ruch jednostajny prostoliniowy może istnieć bez działania sił. Ruch jednostajny po okręgu wymaga już istnienia siły. Według II zasady dynamiki wartość liczbowa tej siły wyraża się zależnością: F = ma

28
Po podstawieniu

29
Otrzymujemy F = ma = m

30
Siła bezwładności, która się pojawia, skierowana jest w stronę
przeciwną do kierunku przyspieszenia. Siła ta nosi nazwę siły odśrodkowej. W postaci skalarnej (pamiętając, że poprzeczna składowa promienia wodzącego w układzie obracającym się to po prostu odległość od osi obrotu, którą oznaczymy symbolem R), można zapisać
, można zapisać.")
31
Wartość siły odśrodkowej wynosi
. Siła ta występuje we wszystkich ruchach po okręgu i ruchach krzywoliniowych.

32
gdzie jest promieniem Ziemi, a jest szerokością geograficzną punktu na kuli ziemskiej

33
Siła Coriolisa Chodzenie po obracającej się tarczy nie jest zadaniem łatwym, bowiem w tym przypadku nie tylko znajdujemy się, ale także i poruszamy się w układzie nieinercjalnym. Nawet gdybyśmy się nie poruszali, działałaby na nas znana nam już siła odśrodkowa. Na ciało poruszające się względem wirującego układu odniesienia działa jednak jeszcze jedna siła zwana siłą Coriolisa.

34
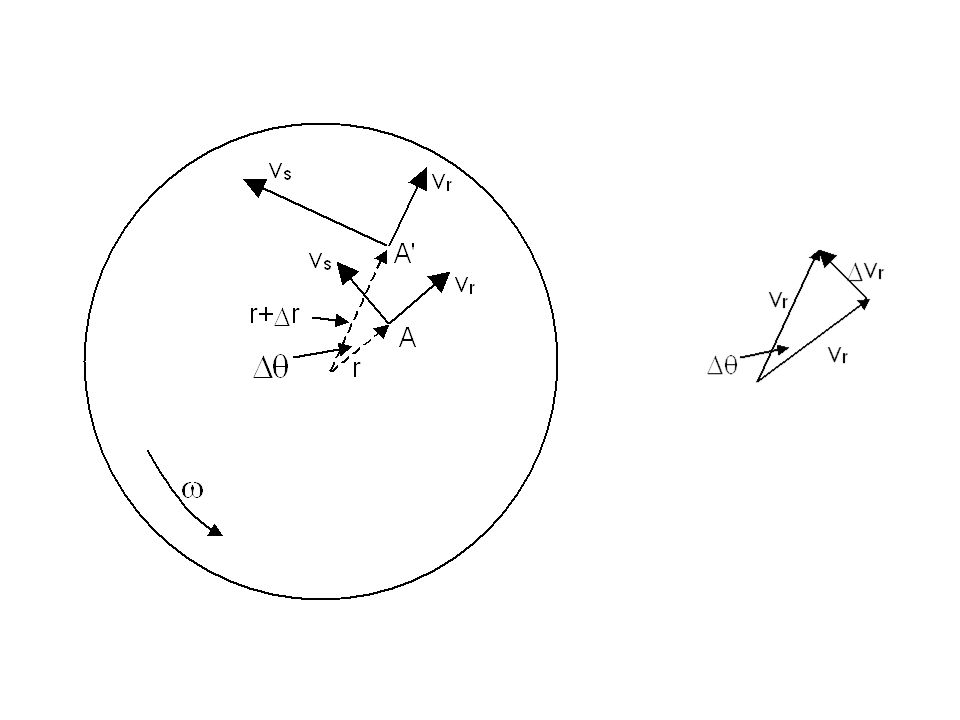
Rozpatrzmy ruch postępowy ciała w obracającym
się układzie odniesienia. Przykładem może być człowiek poruszający się po linii prostej (radialnie) od środka do brzegu karuzeli obracającej się z prędkością kątową w. Na rysunku poniżej pokazana jest zmiana prędkości człowieka.
 od środka do brzegu karuzeli obracającej się z prędkością. kątową w. Na rysunku poniżej pokazana jest zmiana prędkości. człowieka.")
36
Przyjmijmy, że układ nasz (na przykład tarcza) porusza się ruchem
jednostajnym po okręgu z prędkością kątową .W tym obracającym się układzie, w stałej odległości od osi obrotu porusza się ciało po obwodzie okręgu o promieniu z prędkością . Wzór na przyspieszenie w układzie nieruchomym ma zatem postać .

37
Składniki - pierwszy i trzeci po prawej stronie tego wzoru
są nam dobrze znane. Pierwszy pojawi się, jeśli ciało porusza się ruchem przyspieszonym w układzie ruchomym, trzeci jest przyspieszeniem dośrodkowym. Drugi człon jest dla nas nowy. Odpowiadająca mu siła bezwładności zwana siłą Coriolisa ma postać. Widać, że siła ta pojawia się jedynie, gdy ciało porusza się w układzie, który sam jest w ruchu obrotowym. Znak minus oznacza, jak i w poprzednich przypadkach, że siła ta jest skierowana przeciwnie do kierunku przyspieszania, jest bowiem siłą reakcji.

38
Przyspieszenie Coriolisa zależy od relacji pomiędzy kierunkiem
ruchu ciała w układzie ruchomym i kierunkiem prędkości kątowej układu ruchomego względem nieruchomego. Kiedy kierunki te są równoległe, siła Coriolisa wynosi zero, co wynika z własności iloczynu wektorowego.

39
Siła Coriolisa dla dwóch różnych kierunków prędkości w układzie ruchomym.

40
Siła Coriolisa na kuli ziemskiej.

41
Siła bezwładności – podsumowanie.
Siła bezwładności pojawia się zawsze, gdy przechodzimy z opisem do układu nieinercjalnego. Jest ona efektem ruchu samego układu odniesienia i, w odróżnieniu od pozostałych sił, nie wynika z jakiegoś nowego oddziaływania.

42
Siła bezwładności dołączona do równania II zasady dynamiki
powoduje zmianę opisu sytuacji – o ile w układzie inercjalnym ciało widziane było jako pozostające w ruchu, to w układzie nieinercjalnym będzie ono w spoczynku (możliwa jest również sytuacja odwrotna, jednak wtedy posługiwanie się układem nieinercjalnym jest mało celowe, ponieważ opis zamiast stawać się prostszym – komplikuje się).
.")
43
Posługiwanie się układami nieinercjalnymi ma sens wtedy,
gdy ruch ciał trzeba odnieść do obiektów będących w ruchu przyspieszonym – np. względem obracającej się Ziemi, względem karuzeli, czy pojazdu poruszającego się z przyspieszeniem.

Podobne prezentacje