Pobierz prezentację
1
Koło ROBOTyki Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

6
Blok ruchu, dźwięku Blok pojedynczego ruchu, koloru Blok czekania, pętli i przełącznika Aby rozpocząć programowanie w środowisku Lego Mindstorms Software należy poznać kilka podstawowych bloków. Znajdują się one w buttonach zakładki Complete

7
Od niego rozpoczyna się każdy program, ma 3 wyjścia, co oznacza, że robot może mieć do wykonywania 3 różne algorytmy. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

8
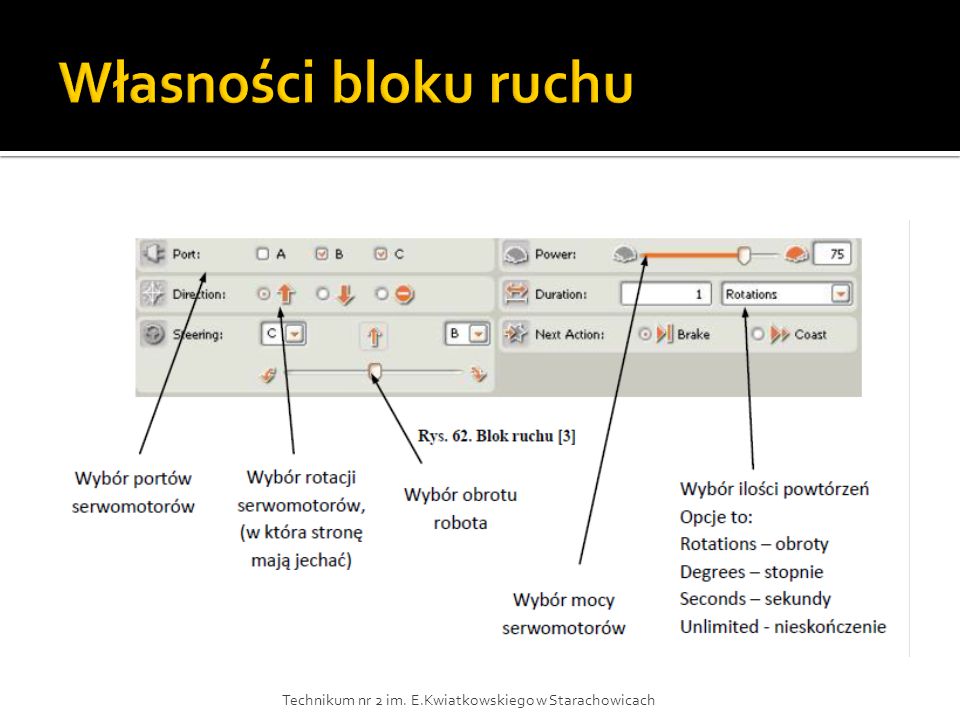
Blok sterujący serwomotorami. W nim możemy ustalić, które serwomotory mają wykonać pracę, z jaką mocą, z jakim podziałem mocy między 2 serwomotory, kierunek obrotu i ilość powtórzeń. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

9
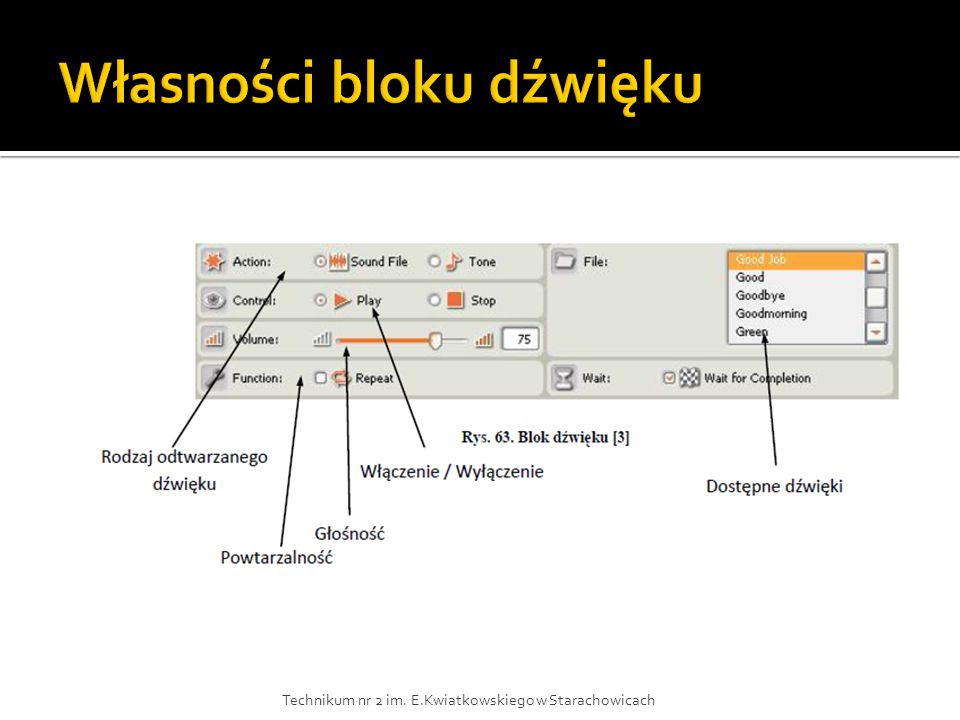
Blok odpowiadający za sterowanie dźwiękiem w robocie. W nim możemy ustawić rodzaj wydawanego dźwięku, ilość powtórzeń, głośność. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

10
Blok sterujący 1 serwomotorem, Ma takie same własności, co blok ruchu Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

11
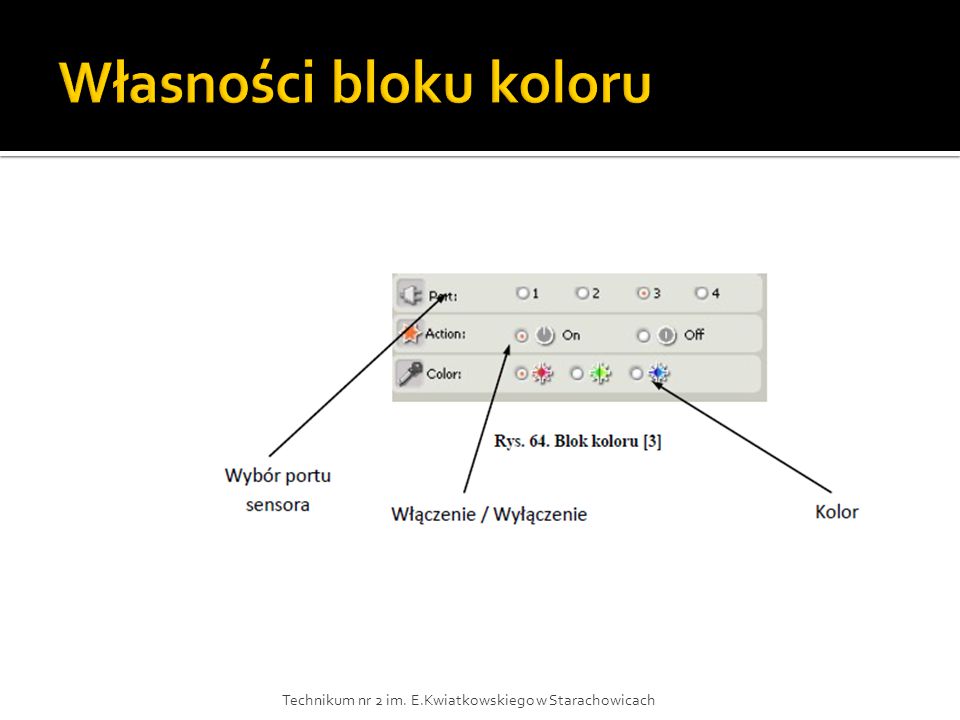
Blok sterujący sensorem koloru, może ustawić 1 z 3 kolorów (czerwony, niebieski, zielony). Należy w nim ustawić, do którego portu podłączyliśmy sensor. Możemy w nim ustalić czy sensor ma być włączony czy wyłączony Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

12
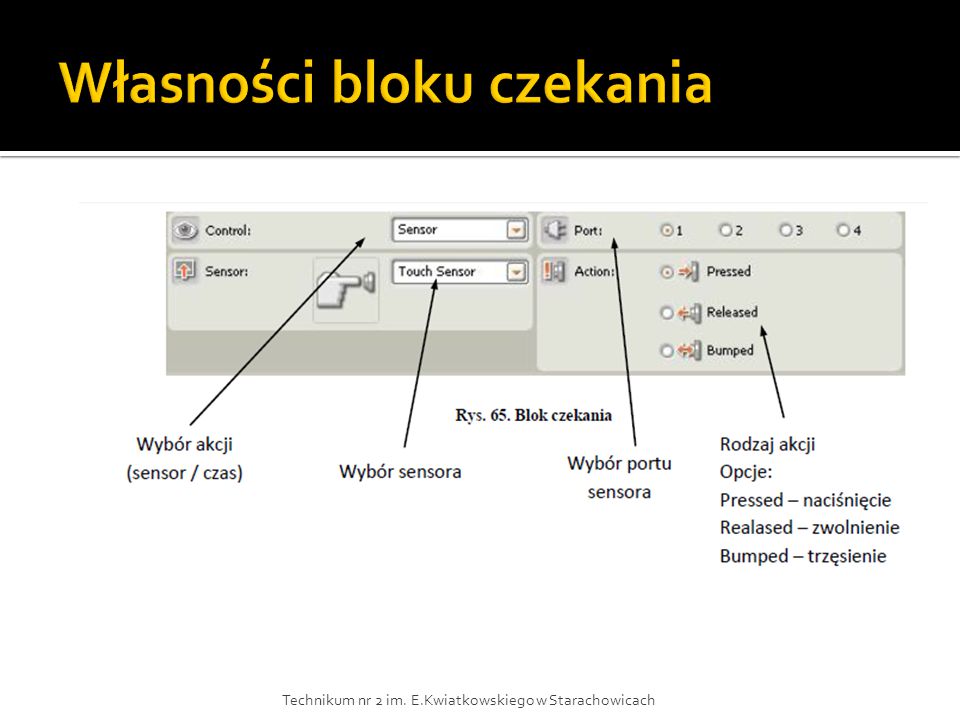
W nim ustalamy, do jakiej akcji ma być wykonywany blok wcześniejszy. Mamy do wyboru opcje czasową bądź aktywację sensorem. Jeżeli wybierzemy sensor należy ustalić, na którym porcie ma być pobierana wartość sensora. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

13
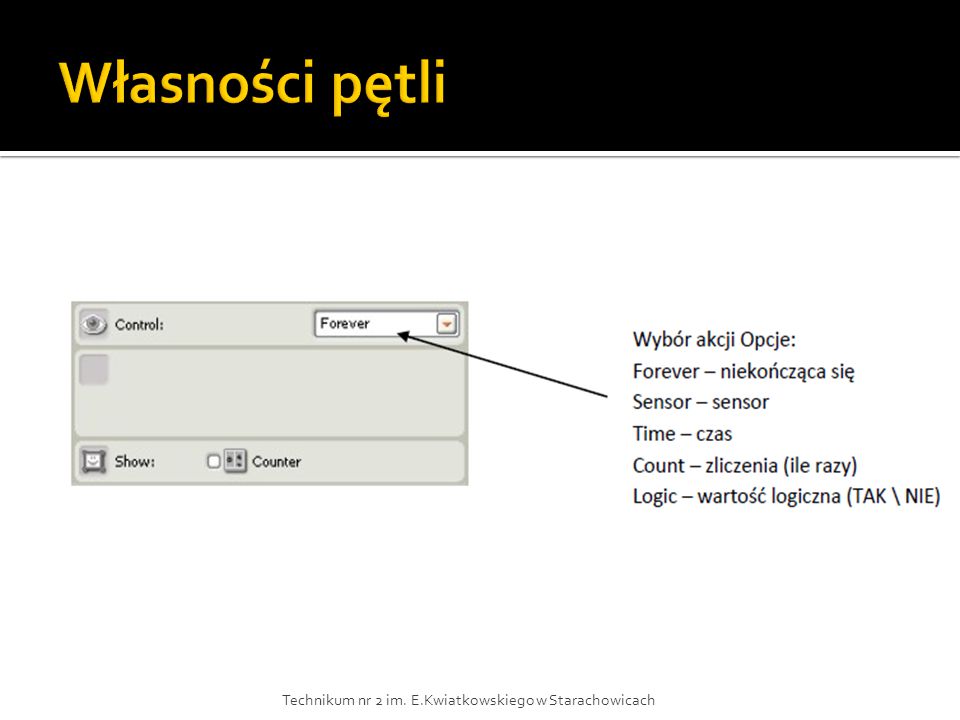
Pętla służy do powtarzania niektórych czynności, określoną ilość razy. Można w niej ustawić ile razy ma być wykonywana lub jaka akcja ma ją kończyć Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

14
Przełącznik służy do rozdzielania programu na 2 operacje ze względu na to, jaką wartość przyjmie parametr na początku przełącznika. Przy wyborze sensora należy pamiętać by ustawić odpowiedni port i czynności. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

15
To podstawowe bloczki niezbędne do tworzenia programów. Teraz należy zapoznać się z ich własnościami. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

21
Podłączyć kabel USB / skonfigurować połączenie bluetooth komputera z robotem. Teraz należy połączyć się kompilatorem z robotem: Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach Łączenie z kostką

22
Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach Połączenie Skanowanie w poszukiwaniu urządzenia

23
Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

25
Zaprogramuj robota tak, aby jechał do przodu 3s. Rozwiązanie: We właściwościach bloku ruchu ustawiamy Duration na Seconds i wpisujemy wartość 3. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

26
Zaprogramuj robota, aby jechał do tyłu 3s. Rozwiązanie: We właściwościach bloku ruchu ustawiamy Duration na Seconds i wpisujemy wartość 3. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

27
Zaprogramuj robota, aby jechał do przodu 5s, po czym cofną się do tyłu 3 obroty. Rozwiązanie: Opis ustawienia pierwszego nie powinien sprawiać problemów, natomiast w drugim w Duration wybieramy Rotations i ustawiamy na 3. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

28
Zaprogramuj robota, aby skręcił w lewo o 45 o. Rozwiązanie: We właściwościach ruchu należy ustawiamy Steering maksymalnie w lewo i ustawiamy Rotations na 2 obroty. Oczywiście robot, może nie wykonać pełnego ruchu bądź zrobić za duży obrót spowodowane jest różnością nawierzchni, na której robot wykonuje ruch. Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

29
Zaprogramuj robota, aby skręcił w prawo o 90 0. Rozwiązanie: Ustawiamy Steering maksymalnie w prawo i ustawiamy Rotations na 4 obroty Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

30
Czaplicki K., Kowalczuk K. „Poradnik programowania robota Lego Mindstorms”, Zespół Szkół Elektrycznych im. prof. Janusza Groszkowskiego w Białymstoku, Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach

31
Wykonał: Marcel Kopyś Technikum nr 2 im. E.Kwiatkowskiego w Starachowicach