Pobierz prezentację
1
ANALIZA KINEMATYCZNA MANIPULATORÓW ROBOTÓW METODĄ MACIERZOWĄ

2
Jeśli dane są: - współrzędne wxi , wyi , wzi wektora w związane z ogniwem i - współrzędne px , py , pz początku układu i związane z ogniwem j oraz kosinusy kierunkowe osi układu i względem osi układu j

4
to zależność pomiędzy współrzędnymi w układzie i oraz j można zapisać jako

5
{ lub w formie symbolicznej gdzie:
- macierz przekształcenia współrzędnych wektora z układu i do układu j Wyznacznik macierzy { 1, gdy obydwa układy są prawoskrętne -1, gdy jeden jest prawo- a drugi lewoskrętny

6
Macierz Tij przekształcenia złożonego z przesunięcia i obrotu można przedstawić w postaci iloczynu macierzy: - obrotu (rotacji) - przesunięcia (translacji) czyli gdzie:
 - przesunięcia (translacji) czyli. gdzie:")
7
Zastosowanie do opisu przekształceń w kinematyce i dynamice manipulatorów robotów macierzy 4x4 jest bardzo wygodne ponieważ umożliwia w zwartej formie zapisać zarówno obrót jak i przesunięcie oraz ułatwia mnożenie odpowiednich macierzy przy użyciu komputerów osobistych bez konieczności sprawdzania osobliwości.

8
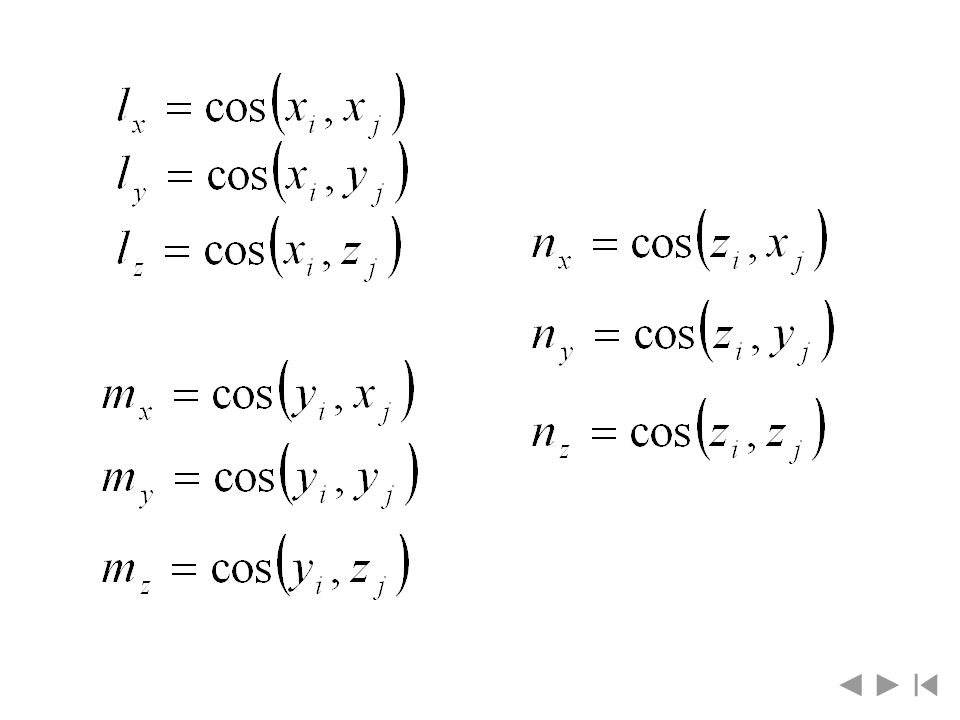
Z dziewięciu zmiennych wyrazów macierzy
- obrotu (rotacji) tylko trzy są niezależne, natomiast pozostałe sześć muszą spełniać równania
 tylko trzy są niezależne, natomiast pozostałe sześć muszą spełniać równania.")
9
przy czy kwadraty kosinusów kierunkowych (trzy pierwsze równania) są równe odpowiednim kwadratom współrzędnych wersorów osi, których długość jest równa 1; pozostałe trzy równania wynikają z warunków prostopadłości wersorów osi układu współrzędnych.
 są równe odpowiednim kwadratom współrzędnych wersorów osi, których długość jest równa 1; pozostałe trzy równania wynikają z warunków prostopadłości wersorów osi układu współrzędnych.")
10
współrzędnych przypadku przekształceń odwrotnych to znaczy przy przejściu z układu j do układu i stosuje się macierze odwrotne, czyli przy czym gdzie: E jest macierzą jednostkową, czyli

11
Hartenberga i Denavita
W celu uproszczenia analizy przestrzennego łańcucha kinematycznego wprowadza się specjalne usytuowanie układów współrzędnych poszczególnych członów tak, aby liczba parametrów wchodzących do macierzy przekształceń była minimalna, a postać tej macierzy była jednakowa tak w przypadku pary obrotowej, jak i pary przesuwnej. W dalszym ciągu przedstawiono najczęściej stosowany sposób usytuowania wzajemnego układów współrzędnych członów połączonych parami obrotowymi i przesuwnymi, który jest znany jako zapis Hartenberga i Denavita

12
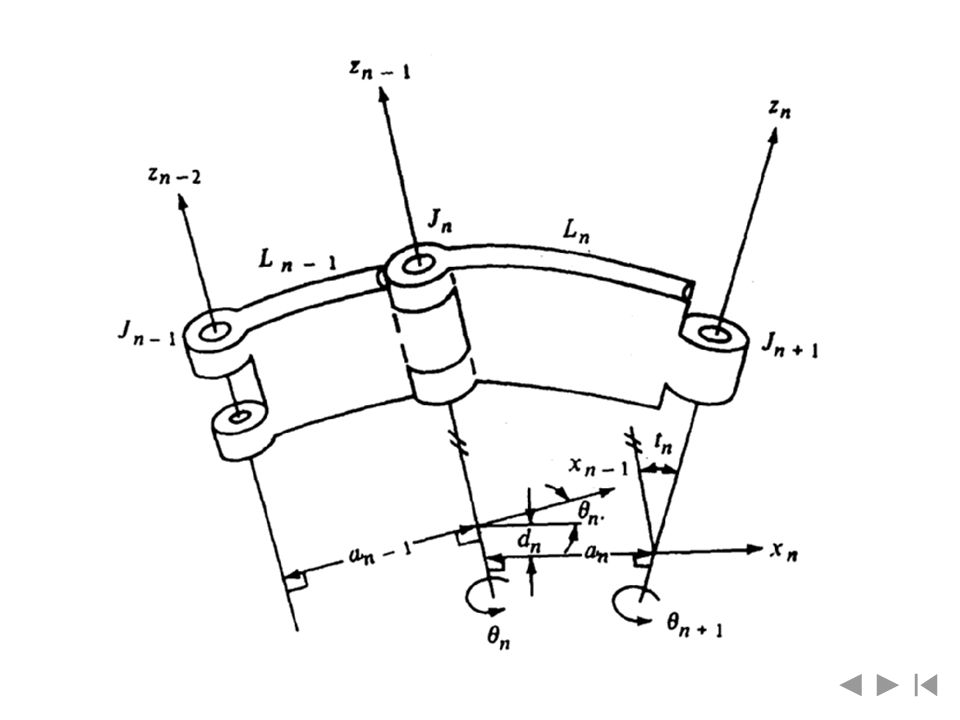
Na rysunku przedstawiono dwa układy współrzędnych związanych z członami i – 1 oraz i,

14
Figure 4-8 The variables in a link using the notation of Paul [9]
Figure 4-8 The variables in a link using the notation of Paul [9]. The rules used to define the notation are: (1) Axis zn-1 defines the position of the axis of rotation for joint Jn, zn, for joint Jn+1, and so forth. (2) Axis xn-1 is selected to be an extension for the common perpendicular line of length an-1 between consecutive joints zn-2 and zn-1. (3) The axis yn-1 – is selected to provide a right-hand coordinate system with the other axes. (4) Axis xn is an extension of the common perpendicular line of Iength an. Rys 4-8. Zapis zmiennych z użyciem notacji Paul’a [7]. Według zasad: (1) Oś zn-1 opisuje położenie osi rotacji dla ogniwa Jn, zaś oś zn dla ogniwa Jn+1 itd. (2) Oś xn-1 jest przedłużeniem linii znajdującej się pomiędzy osią zn-2 i zn-1 i prostopadłą do nich o długości an-1. (3) Oś yn-1 zapewnia prawoskrętny układ współrzędnych. (4) Oś xn jest przedłużeniem linii prostopadłej do osi zn-1 o długości an.
![Figure 4-8 The variables in a link using the notation of Paul [9]](http://slideplayer.pl/slide/1283788/3/images/14/Figure+4-8+The+variables+in+a+link+using+the+notation+of+Paul+%5B9%5D.jpg "Figure 4-8 The variables in a link using the notation of Paul [9]. The rules used to define the notation are: (1) Axis zn-1 defines the position of the axis of rotation for joint Jn, zn, for joint Jn+1, and so forth. (2) Axis xn-1 is selected to be an extension for the common perpendicular line of length an-1 between consecutive joints zn-2 and zn-1. (3) The axis yn-1 – is selected to provide a right-hand coordinate system with the other axes. (4) Axis xn is an extension of the common perpendicular line of Iength an. Rys 4-8. Zapis zmiennych z użyciem notacji Paul’a [7]. Według zasad: (1) Oś zn-1 opisuje położenie osi rotacji dla ogniwa Jn, zaś oś zn dla ogniwa Jn+1 itd. (2) Oś xn-1 jest przedłużeniem linii znajdującej się pomiędzy osią zn-2 i zn-1 i prostopadłą do nich o długości an-1. (3) Oś yn-1 zapewnia prawoskrętny układ współrzędnych. (4) Oś xn jest przedłużeniem linii prostopadłej do osi zn-1 o długości an.")
15
Usytuowanie układów współrzędnych

16
Usytuowanie układów współrzędnych

17
xi-1 zi-1 yi-1 i-1 przy czym oś
leży na wspólnej prostopadłej do osi par obrotowych członu i-1, oś zi-1 leży na osi pary obrotowej łączącej człony i z i oś yi-1 nie pokazana na rysunku stanowi uzupełnienie prawoskrętnego układu współrzędnych i-1

18
i xi i zi Układ współrzędnych jest związany z członem
w podobny sposób, to znaczy oś xi leży na wspólnej prostopadłej do osi par obrotowych członu i oś zi leży na osi pary obrotowej łączącej człon i z członem i + 1

19
Zaletą takiego usytuowania układów współrzędnych jest to, że tylko cztery parametry określają względne położenie dwóch sąsiednich układów, przy czym dwa z nich to znaczy li oraz αi są zawsze stałe, jeden z pozostałych jest zmienny w zależności od typu pary kinematycznej - w przypadku pary obrotowej zmienny jest kąt θi - w przypadku pary przesuwnej zmienne jest przesunięcie λi

20
i jeszcze jednego obrotu
Dwa sąsiednie układy współrzędnych i oraz i-1 mogą być przekształcone jeden w drugi za pomocą obrotu dwóch przesunięć i jeszcze jednego obrotu w następującej kolejności a) obrót wokół osi zi-1 o kąt θi tak, aż oś xi-1 stanie się równoległa do osi xi
 obrót wokół osi. zi-1 o kąt θi. tak, aż oś xi-1 stanie się równoległa do osi xi.")
21
b) przesunięcie wzdłuż osi
zi-1 o wielkość λi tak, aby oś xi-1 pokryła się z osią xi c) przesunięcie wzdłuż osi xi o wielkość li tak, aby początki obu układów pokryły się d) obrót wokół osi xi o kąt αi tak aż wszystkie osie będą pokrywać się
 przesunięcie wzdłuż osi. xi o wielkość li. tak, aby początki obu układów pokryły się. d) obrót wokół osi. xi o kąt αi. tak aż wszystkie osie będą pokrywać się.")
22
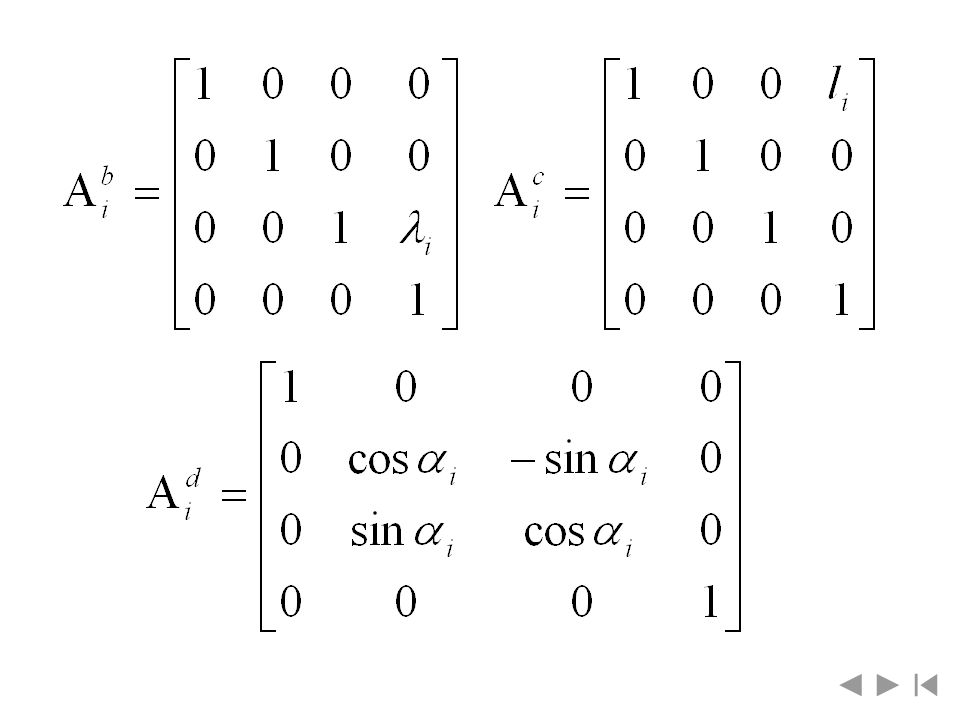
Ti,i-1 Ai Każdemu z tych elementarnych ruchów odpowiada macierz
Przekształcenia, którą tutaj oznaczono przez Ai przy czym

24
Macierz Ai opisująca przekształcenia z układu
i do układu i-1 będzie równa iloczynowi wyżej wymienionych macierzy ruchów elementarnych, czyli Zatem, po wykonaniu mnożeń macierzy zaczynając od prawej strony otrzymuje się

25
gdzie: li , αi - odległość i kąt pomiędzy osiami par obrotowych ogniwa i, λi , θi , - odległość i kąt obrotu pomiędzy ogniwami i-1 oraz i

26
Przypadku pary obrotowej kąt θi jest zmienny, a odległość λi jest stała; w przypadku pary przesuwnej zmienna jest długość λi a stały kąt θi Macierz przekształcenia odwrotnego, to znaczy układu współrzędnych członu i-1 do układu członu i otrzymuje się jako rozwiązanie równania macierzowego gdzie: E – macierz jednostkowa

27
stąd W przypadku otwartego łańcucha kinematycznego wprowadza się macierz położenia i orientacji układu związanego z członem n względem układu związanego z członem i jako iloczyn macierzy kolejnych przekształceń

28
przy czym W przypadku zamkniętego łańcucha kinematycznego, zbudowanego z n członów wprowadza się równanie zamknięcia w postaci Mnożąc z lewej strony powyższe równanie przez macierze odwrotne otrzymuje się równanie zamknięcia łańcucha kinematycznego w bardziej wygodnej postaci

29
………………….…………………… W przypadku, gdy dany jest wektor

30
opisujący położenie dowolnego punktu Pi należącego do członu i w układzie współrzędnych związanym z tym członem oraz dane są macierze kolejnych przekształceń, wtedy z równań oraz

31
można wyznaczyć wektor
opisujący położenie punktu Pi w układzie podstawy przy czym mnożenia macierzy trzeba zaczynać od prawej strony (!!!) Kolejność obliczeń jest zatem następująca
 Kolejność obliczeń jest zatem następująca.")
32
………….……………… (wzory na r)
")
33
Wektory prędkości i przyspieszenia punktu Pi otrzymuje się jako pierwszą i drugą pochodną względem czasu wektora A zatem

34
Różniczkując kolejno dwie ostatnie zależności przy założeniu, że
otrzymuje się algorytm wyznaczania prędkości jako ……………………………………………

35
(wzory na v) oraz algorytm wyznaczania przyśpieszenia jako ………………………………………………….
 oraz algorytm wyznaczania przyśpieszenia jako ………………………………………………….")
36
Aj (wzory na a) Pochodne względem czasu macierzy
oblicza się według następujących wzorów (wzory na A)
")
37
przy czym w przypadku pary obrotowej

38
natomiast w przypadku pary przesuwnej

39
Podstawiając (wzory na A) do (wzorów na v) i (wzorów na a) przy uwzględnieniu (wzorów na r) otrzymuje się …………………….…………………… (wzory na v)1
1.")
40
oraz …………………………………….. (wzory na a)1
1")
41
PRZYKŁAD Gdy i = 2 wtedy (wzory na r) przyjmą postać natomiast (wzory na v)1 są następujące
 przyjmą postać natomiast (wzory na v)1 są następujące")
42
natomiast ( wzory na a)1 przyjmą formę
Wektory prędkości kątowej i przyspieszenia kątowego członów można wyznaczyć z następujących równań:

43
(wzór na prędkość kątową członów)
………………………………………

44
(wzór na przyśpieszenia kątowe członów)
")
45
gdzie: