Pobierz prezentację
1
Miernictwo przemysłowe 1 Tytuł 2 Czujniki parametryczne-rezystancyjny suwakowy, 3 -tensometryczny, 4 -bimetaliczny, -Burdona 5 -indukcyjnościowy transformatorowy 6 -chromatograficzny 7 Czujniki generacyjne: -termopara, 8 -piezoelektryczne 9 piezo- przyspieszenia 10 porównanie zakresów pracy przetw. przyspiszenia 11 firmowe przetworniki przyspieszenia 12 -Hallotronowe 13 Układy i przyrządy współpracujące z przetwornikami, 14 -mostki niezrównoważone prądu zminnego 15 -parametry pracy wybranych mostków 16 Niezrównoważony mostek Wiena i transformatorowy 17 Mostek niezrównoważony trójprzewodowy z ekranem 18 Funkcja przetwarzania mostka dla różnych sposobów włączenia generatora i woltomierza 19 Dwuparametrowy pomiar z modulacją kwadraturową w mostku Wiena 20 Dwuparametrowy mostek, błędy wzorów uproszczonych 21 Dwuparametrowy mostek, wzory uproszczone 22 Dwuparametrowy mostek – funkcja przetwarzania 23 układy x/f Andrzej Rylski Politechnika Rzeszowska Katedra Metrologii i Systemów Diagnostycznych ul. W. Pola 2 35-959 Rzeszów rylski@prz.rzeszow.pl http://rylski.sd.prz.edu.pl/

2
plug potentiomete r cursor spiral cell case Czujniki parametryczne. Rys.1. Czujnik rezystancyjny suwakowy

3
Rys.1. Czujnik rezystancyjny tensometryczny Czujniki parametryczne.

4
Rys.3. Czujnik bimetaliczny Czujniki parametryczne.

5
Principle of an inductive accelerometer Czujniki parametryczne.

6
Rys.. Czujnik chromatograficzny Czujniki parametryczne.

7
Termopary Termopara WoltomierzAmperomierz Gdzie: dE = generowane napięcie [V] dT = różnica temperatur [K] = współczynnik Thomson’a [V/°C] np.: Cu 2,2 V/°C Fe –8,4 V/°C Napięcie Thomson’a Efekt Peltier’a Efekt Seebeck’a Czujniki generacyjne.
![Termopary Termopara WoltomierzAmperomierz Gdzie: dE = generowane napięcie [V] dT = różnica temperatur [K] = współczynnik Thomson’a [V/°C] np.: Cu 2,2 V/°C Fe –8,4 V/°C Napięcie Thomson’a Efekt Peltier’a Efekt Seebeck’a Czujniki generacyjne.](http://images.slideplayer.pl/39/10945416/slides/slide_7.jpg "Termopary Termopara WoltomierzAmperomierz Gdzie: dE = generowane napięcie [V] dT = różnica temperatur [K] = współczynnik Thomson’a [V/°C] np.: Cu 2,2 V/°C Fe –8,4 V/°C Napięcie Thomson’a Efekt Peltier’a Efekt Seebeck’a Czujniki generacyjne.")
8
general principle of piezoelectric accelerometer piezo accelerometer with axial compression with screw Czujniki generacyjne.

9
F = m a (1) F = inertia force m = mass a = the accleration Fig 5.3: The principle of the accelerometer The equation of the movement is given by the equation (2) (2) k = the stiffness of the spring = the damping coefficient The damping coefficient of the moving element is due to the viscosity of the ambient conditions. In a stable state, the relation between displacement x and acceleration is (equation 3) (3) The sensitivity of the accelerometer x / is proportional to (m / k) The resonance frequency of the system is given by the equation (4): (4)
 (3) The sensitivity of the accelerometer x / is proportional to (m / k) The resonance frequency of the system is given by the equation (4): (4).")
10
Main Models of accelerometers Principles of détection Recommanded range of frequencies Hz 0,111010010001000 0 10000 0 With current of Foucault With resonator Servo –controlled (electrodynamic) Electromagnetic Electrostatic Optic Piezoélectric(quartz or céramics) Piezotransistor Capacitive bridge Bridge of Piezoresistive Gauges Bridge of resistives gauges
 Electromagnetic Electrostatic Optic Piezoélectric(quartz or céramics) Piezotransistor Capacitive bridge Bridge of Piezoresistive Gauges Bridge of resistives gauges")
11
INCLINAISON ECONOMIC INCLINOMETER MODEL ME 26400 APPLICATIONS: angle measure, deformation control, stabilization, regulation, safety. SPECIFICATIONS: 3 ranges : +/- 30°, +/- 70°, +/- 80° Accuracy : 0,2 % of the range Transversal error : < 1 % Small size,Low cost. MODELS Case ACase B SPECIFICATIONSME 26410ME 26420ME 26430 Range (deg.)+/- 30+/- 70+/- 80 Power supply (V/ma)5/1 Sensitivity (mV/deg.)53.24.3 Resolution (deg.)0.01 Non Linearity (% range)0.15 0.2 Offset (V)2.5 +/- 0.1 Transverse sensitivity (% range)< 1 Output impedance (KOhm)10 Time rise (sec)0.3 Thermal Zero shift (deg./°C)0.0050.0080.012 Thermal Span shift (deg./°C)- 0.1 - 0.04 Operating temperature-40 to +85°C Maximum Shock100 g ; 11 ms ProtectionIP 65 Weight (g)18.5 72 Main Models of accelerometers QAT160/T185 Q-Flex® Model 2412Three Axis Analog Accelero meter Module
+/- 30+/- 70+/- 80 Power supply (V/ma)5/1 Sensitivity (mV/deg.) Resolution (deg.)0.01 Non Linearity (% range) Offset (V)2.5 +/- 0.1 Transverse sensitivity (% range)< 1 Output impedance (KOhm)10 Time rise (sec)0.3 Thermal Zero shift (deg./°C) Thermal Span shift (deg./°C) Operating temperature-40 to +85°C Maximum Shock100 g ; 11 ms ProtectionIP 65 Weight (g) Main Models of accelerometers QAT160/T185 Q-Flex® Model 2412Three Axis Analog Accelero meter Module.")
12
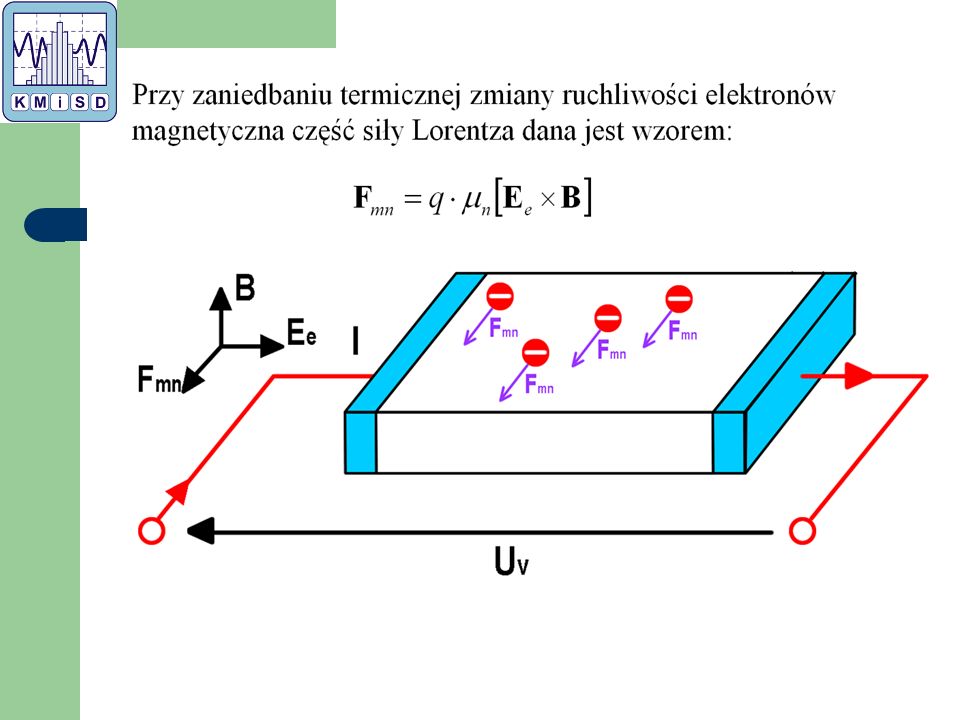
I t B VHVH Czujniki generacyjne.

13
Wyobraźmy sobie pasek półprzewodnika, do którego końców przyłączone zostają elektrody umożliwiające podłączenie go do obwodu elektrycznego

14
Pod wpływem przyłożonego U v przez płytkę przepływa prąd elektryczny o ustalonym natężeniu I.

15
Przyjmijmy, że płytka jest wykonana z mocno domieszkowanego półprzewodnika typu „n”. Obecność dziur możemy zaniedbać. Prąd przepływający przez półprzewodnik rozważać dalej będziemy jako uporządkowany ruch elektronów.

16
Trzeba przypomnieć sobie działanie pola magnetycznego na poruszający się ładunek. Otóż pole to oddziałuje na ładunek z siłą zwaną siłą Lorentza, której kierunek i zwrot można określić przy pomocy reguły lewej ręki. Kiedy wyciągniemy lewą dłoń w ten sposób, że wyprostowane cztery palce wskażą kierunek płynącego prądu a linie wektorów indukcji magnetycznej B wchodzą do wewnątrz dłoni to odchylony kciuk wskaże kierunek i zwrot działającej siły.

17
Napięcie stałe przyłożone do końców paska wywołuje pole elektryczne E e. Elektrony poruszają się wtedy wzdłuż płytki ze średnią prędkością dryftu: Gdziejest ruchliwością elektronów Gęstość prądu przepływającego przez płytkę dana jest wzorem: Gdzie q jest ładunkiem elementarnym.

19
Układy i przyrządy współpracujące z przetwornikami

20
Mostki niezrównoważone prądu przemiennego Rys.9.1 Schemat mostka niezrównoważonego prądu przemiennego Rys.9.2 Zależność napięcia nierównowagi mostka w funkcji zmian impedancji Z1 w mostku Z1[]Z1[] U[V] Z 1 = Z 2 = Z 3 = Z 4 =100[ ], U z =1[V] U z =U m sin t, Z v = (9.1) (9.2) Iz=Im sinwt Zv= (9.3) (9.4)
![Mostki niezrównoważone prądu przemiennego Rys.9.1 Schemat mostka niezrównoważonego prądu przemiennego Rys.9.2 Zależność napięcia nierównowagi mostka w funkcji zmian impedancji Z1 w mostku Z1[]Z1[] U[V] Z 1 = Z 2 = Z 3 = Z 4 =100[ ], U z =1[V] U z =U m sin t, Z v = (9.1) (9.2) Iz=Im sinwt Zv= (9.3) (9.4)](http://images.slideplayer.pl/39/10945416/slides/slide_20.jpg "Mostki niezrównoważone prądu przemiennego Rys.9.1 Schemat mostka niezrównoważonego prądu przemiennego Rys.9.2 Zależność napięcia nierównowagi mostka w funkcji zmian impedancji Z1 w mostku Z1[]Z1[] U[V] Z 1 = Z 2 = Z 3 = Z 4 =100[ ], U z =1[V] U z =U m sin t, Z v = (9.1) (9.2) Iz=Im sinwt Zv= (9.3) (9.4)")
21
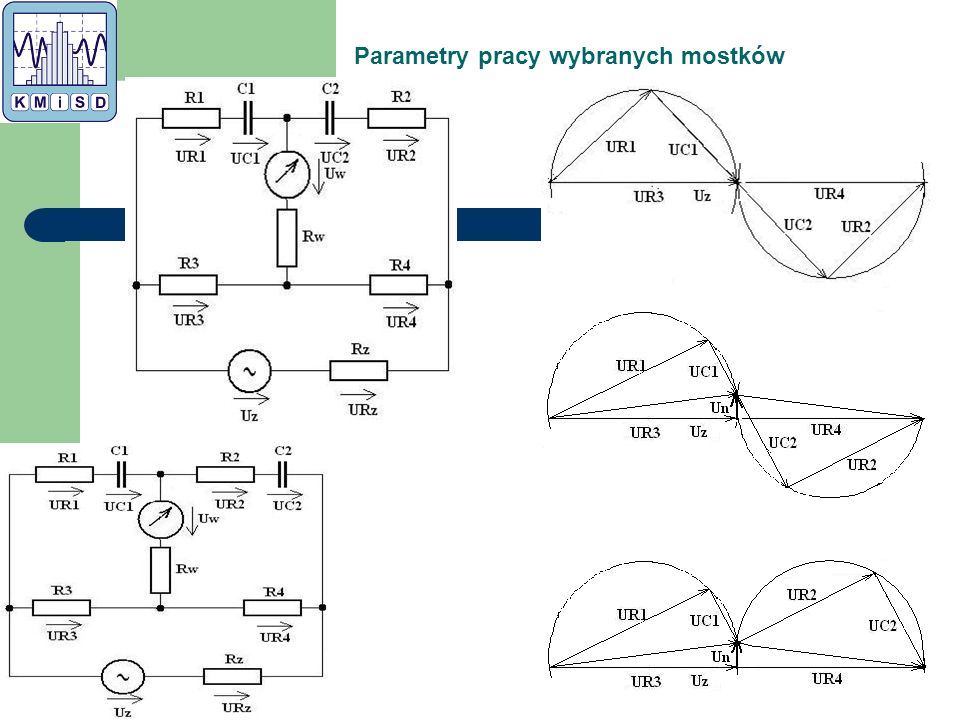
Parametry pracy wybranych mostków Tabela 9.A. Parametry pracy wybranych mostków impedancje zmiennekierunek zmian impedancjinapięcie nierównowagi mostka gdy Z 1 Z 2 Z 3 Z 4 Z1Z1 (+, -)+1 (9.5) Z2Z2 (+, -) [9.6) Z 1, Z 3 Z 1 (+, -), Z 3 (+, -)0 Z 1 (+, -), Z 3 (-,+)+2 (9.9) Z 1, Z 4 Z 1 (+, -), Z 4 (+, -)+2 (9.11) Z 1 (+, -), Z 4 (-,+)0 Z 1, Z 2, Z 3 Z 1 (+, -), Z 2 (+,-), Z 3 (+, -)+1+1 (9.13) Z 1, Z 2, Z 3 Z 1 (+, -), Z 2 (+,-), Z 3 (-,+)+3+3 (9.14) Z 1, Z 2, Z 3, Z 4 Z 1 (+,-), Z 2 (+,-), Z 3 (+,-), Z 4 (+,-)0 Z 1, Z 2, Z 3, Z 4 Z 1 (+,-), Z 2 (-,+), Z 3 (-,+), Z 4 (+,-)+4+4 (9.15)
+1 (9.5) Z2Z2 (+, -) [9.6) Z 1, Z 3 Z 1 (+, -), Z 3 (+, -)0 Z 1 (+, -), Z 3 (-,+)+2 (9.9) Z 1, Z 4 Z 1 (+, -), Z 4 (+, -)+2 (9.11) Z 1 (+, -), Z 4 (-,+)0 Z 1, Z 2, Z 3 Z 1 (+, -), Z 2 (+,-), Z 3 (+, -)+1+1 (9.13) Z 1, Z 2, Z 3 Z 1 (+, -), Z 2 (+,-), Z 3 (-,+)+3+3 (9.14) Z 1, Z 2, Z 3, Z 4 Z 1 (+,-), Z 2 (+,-), Z 3 (+,-), Z 4 (+,-)0 Z 1, Z 2, Z 3, Z 4 Z 1 (+,-), Z 2 (-,+), Z 3 (-,+), Z 4 (+,-)+4+4 (9.15).")
22
Parametry pracy wybranych mostków

24
Niezrównoważony mostek Wiena i transformatorowy Rys. 9.3. Układ pracy mostka impedancyjnego z woltomierzem wektorowym Rys. 9.4. Mostek niezrównoważony transformatorowy z pomiarem składowych R,X impedancji Zx=R+jX

25
Mostek niezrównoważony trójprzewodowy z ekranem Rys. 9.11. Mostek niezrównoważony trójprzewodowy z ekranem Z2Z4 Z1 Z3

26
Rys.1. Schemat mostka a. generator włączony w węzły A-C, woltomierz włączony w węzły B-D b. generator włączony w węzły B-D, woltomierz włączony w węzły A-C Wielowątkowa analizę warunków równowagi opisali Szadkowski np.[3], Miczulski w monografii [4 ] A B C D A B C D Funkcja przetwarzania mostka dla różnych sposobów włączenia generatora i woltomierza

27
a.b. A B C D A B C D Rys. 2 Mostek Wiena : a. generator włączony w węzeł połączenia dwóch gałęzi RC i węzeł połączenia dwóch gałęzi R - zasilanie symetrycznych par ramion mostka, woltomierz włączony w węzły połączenia gałęzi RC i R b. generator włączony w węzły połączenia gałęzi RC i R - zasilanie niesymetrycznych par ramion mostka, woltomierz włączony w węzeł połączenia dwóch gałęzi RC i węzeł połączenia dwóch gałęzi R Dwuparametrowy pomiar z modulacją kwadraturową w mostku Wiena

28
pod warunkami, że impedancje w gałęziach są w przybliżeniu sobie równe B A D C Rys. 3 Wykres niedokładności obliczeń wzorami przybliżonymi :1-UR [14] i UX [15] dla jednoczesnych odstrojeń rezystorów R1 i R3 w trzech przedziałach: a - (0,01 - 0,1) [%], b - (0,1 - 1)[%], c - (1 - 10) [%] R [%] U[%] Dwuparametrowy mostek, błędy wzorów uproszczonych
 [%], b - (0,1 - 1)[%], c - (1 - 10) [%] R [%] U[%] Dwuparametrowy mostek, błędy wzorów uproszczonych.")
29
Dwuparametrowy mostek, wzory uproszczone

30
Sposoby niezależnego jednoczesnego pomiaru dwóch rezystancji: Rezystory zmienne: R1 i R3, Ux=f( R1), UR=f( R3), Rezystory zmienne: R1 i R4, Ux=f( R1), UR=f( R4), Rezystory zmienne: R2 i R3, Ux=f( R2), UR=f( R3), Rezystory zmienne: R2 i R4, Ux=f( R2), UR=f( R4), Dwuparametrowy mostek – funkcja przetwarzania
, UR=f( R3), Rezystory zmienne: R1 i R4, Ux=f( R1), UR=f( R4), Rezystory zmienne: R2 i R3, Ux=f( R2), UR=f( R3), Rezystory zmienne: R2 i R4, Ux=f( R2), UR=f( R4), Dwuparametrowy mostek – funkcja przetwarzania")
31
+ R1R1 R2R2 R C R C U wy U we - k u =1(4.2) 1 + 2 =2n (4.3) Rys. 4.7. Schemat układu generatora z mostkiem Wiena zakres częstotliwości 0,1 Hz ¸ 1 MHz. współczynnikiem zniekształceń nieliniowych (poniżej 0,1%) dużą stabilnością częstotliwości (1,5 × 10-4 ¸2,5 ×10-3). Układy przetworników x/f Generator Hartleya. Układ został wynaleziony przez Ralpha Hartleya w 1915 roku.
 dużą stabilnością częstotliwości (1,5 × 10-4 ¸2,5 ×10-3). Układy przetworników x/f Generator Hartleya. Układ został wynaleziony przez Ralpha Hartleya w 1915 roku..")










 (1623-1662) Blaise Pascal Ciśnienie wywierane na ciecz rozchodzi się jednakowo we wszystkich.>")






 przekształcający prąd elektryczny w falę akustyczną. Idealny głośnik przekształca.>")


