Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

2
SYSTEMY ECHOLOKACYJNE1 ROMAN SALAMON KATEDRA SYTEMÓW ELEKTRONIKI MORSKIEJ Pokój 747 tel. 347-17-17 e-mail.: roman.salamon@eti.pg.gda.plroman.salamon@eti.pg.gda.pl Konsultacje: codziennie od 12-16

3
SYSTEMY ECHOLOKACYJNE2 SPRAWY ORGANIZACYJNE Układ przedmiotu: Wykład - 2 godz. Laboratorium terenowe - 1 godz. Stacja Badań Hydroakustycznych Katedry Systemów Elektroniki Morskiej nad Jeziorem Wdzydze. Dwudniowy wyjazd w grupach kilkunastoosobowych w maju. Prowadzący: dr J. Marszal, dr K. Zachariasz

4
SYSTEMY ECHOLOKACYJNE3 Stacja Badań Hydroakustycznych

5
SYSTEMY ECHOLOKACYJNE4 Forma zaliczenia: wykład - jedno lub dwa kolokwia laboratorium obecność (obowiązkowa) – ocena dostateczna, sprawozdanie (nieobowiązkowe) – lepsza ocena. Ocena łączna: 60% - wykład, 40% laboratorium Minimum punktów na zaliczenie 50% Materiały pomocnicze: Program wykładu i laboratorium – Serwis Programów Zajęć Dydaktycznych (www.ects.eti.pg.gda.pl) Literatura - tamże

6
SYSTEMY ECHOLOKACYJNE5 Literatura M. Skolnik: Radar Handbook, McGraw-Hill Professional, 2008 R. Salamon: Systemy hydrolokacyjne, Wyd. GTN, Gdańsk 2006 A. Nowicki: Ultradźwięki w medycynie, Wyd. IPPT PAN, Warszawa 2010

7
SYSTEMY ECHOLOKACYJNE6 OGÓLNA CHARAKTERYSTYKA SYSTEMÓW ECHOLOKACYJNYCH. Definicja systemu telekomunikacyjnego Systemem telekomunikacyjnym nazywamy system służący do przekazywania informacji na odległość przy użyciu sygnałów. Definicja systemu echolokacyjnego System echolokacyjny jest systemem (telekomunikacyjnym) służącym do pozyskiwania informacji o środowisku i znajdujących się w nim oddalonych obiektach przy użyciu sygnałów echa.
 służącym do pozyskiwania informacji o środowisku i znajdujących się w nim oddalonych obiektach przy użyciu sygnałów echa..")
8
SYSTEMY ECHOLOKACYJNE7 Zasada pracy systemu echolokacyjnego W impulsowych systemach echolokacyjnych celu określenia położenia celu : mierzy się czas t od momentu wysłania impulsu do momentu odbioru sygnału echa i oblicza się odległość obiektu R=ct/2 (c- prędkość propagacji fali) wykorzystuje się kierunkowość anteny aby określić namiar wiązka
 wykorzystuje się kierunkowość anteny aby określić namiar wiązka")
9
SYSTEMY ECHOLOKACYJNE8 Inne zasady pracy systemów echolokacyjnych Systemy z falą ciągłą CW FM Nadajnik emituje sygnał z liniową modulacją częstotliwości. Opóźniony sygnał echa jest porównywany z aktualnym sygnałem emitowanym. Wyznaczana jest różnica częstotliwości obu sygnałów, która jest proporcjonalna do odległości obiektu obserwowanego obiektu. fnfn fofo f n -f o =at o toto R=ct o /2

10
SYSTEMY ECHOLOKACYJNE9 Dopplerowskie systemy na fali ciągłej Przeznaczenie: pomiar prędkości ruchomych obiektów (samochodów, krwi itp.) Zasada pracy: Nadajnik emituje ciągły sygnał o stałej częstotliwości f n. Ze względu na efekt Dopplera odbierany sygnał echa ma inną częstotliwość f o, zależną do prędkości obiektu v. Wynosi ona: f o =f n (1+2v/c) gdzie c – prędkość propagacji fali Wyznacza się różnicę f n -f o, a stąd prędkość v. Systemy pasywne W systemach pasywnych nie ma nadajnika. Źródłem sygnału odbieranego są obiekty emitujące fale akustyczne (b.rzadko elektromagnetyczne). Wykorzystując kierunkowość anten system pasywny wyznacza tylko namiar.
 gdzie c – prędkość propagacji fali Wyznacza się różnicę f n -f o, a stąd prędkość v. Systemy pasywne W systemach pasywnych nie ma nadajnika. Źródłem sygnału odbieranego są obiekty emitujące fale akustyczne (b.rzadko elektromagnetyczne). Wykorzystując kierunkowość anten system pasywny wyznacza tylko namiar..")
11
SYSTEMY ECHOLOKACYJNE10 Struktura sytemu echolokacyjnego ŹRÓDŁO INFORMACJI NADAJNIK KANAŁ ODBIORNIK ODBIORCA INFORMACJI SYSTEM TELEKOMUNIKACYJNY SYSTEM ECHOLOKACYJNY NADAJNIK ODBIORNIK KANAŁ ŹRÓDŁO INFORMACJI ODBIORCA INFORMACJI sygnał echa sygnał sondujący

12
SYSTEMY ECHOLOKACYJNE11 Podstawowe cechy systemów echolokacyjnych Informacja o obiekcie przyporządkowywana jest sygnałowi echa, które powstaje w wyniku odbicia sygnału sondującego od obiektu. Nośnikiem sygnałów są zmodulowane fale elektromagnetyczne (w tym optyczne) lub akustyczne. W systemach echolokacyjnych stosuje się takie fale, które są najmniej tłumione w danym ośrodku (kanale). Nośnikiem informacji jest wyłącznie sygnał echa.
 lub akustyczne. W systemach echolokacyjnych stosuje się takie fale, które są najmniej tłumione w danym ośrodku (kanale). Nośnikiem informacji jest wyłącznie sygnał echa..")
13
SYSTEMY ECHOLOKACYJNE12 Zadania systemów echolokacyjnych Wykrycie obiektu (celu) – detekcja (wykrycie sygnału echa wśród zakłóceń) Określenie położenia obiektu – lokalizacja (pomiar czasu od wysłania impulsu sondującego do momentu odbioru sygnału echa, określenie namiaru przez wykorzystanie kierunkowości anten) Określenie parametrów celu (wielkości, prędkości) – estymacja parametrów (na podstawie analizy sygnałów echa) Klasyfikacja i identyfikacja obiektu.
 – detekcja (wykrycie sygnału echa wśród zakłóceń) Określenie położenia obiektu – lokalizacja (pomiar czasu od wysłania impulsu sondującego do momentu odbioru sygnału echa, określenie namiaru przez wykorzystanie kierunkowości anten) Określenie parametrów celu (wielkości, prędkości) – estymacja parametrów (na podstawie analizy sygnałów echa) Klasyfikacja i identyfikacja obiektu.")
14
SYSTEMY ECHOLOKACYJNE13 KLASYFIKACJA SYSTEMÓW ECHOLOKACYJNYCH SYSTEMY ECHOLOKACYJNE AKTYWNE, PASYWNE ELKTROMAGNETYCZNEAKUSTYCZNE HYDROAKUSTYCZNE AEROAKUSTYCZNE DIAGNOSTYCZNE RADIOLOKACYJNE OTYCZNE

15
SYSTEMY ECHOLOKACYJNE14 Klasyfikacja ze względu na przeznaczenie RADIOLOKACYJNEHYDROAKUSTYCZNEDIAGNOSTYCZNE RADARY LOTNICZE RADARY MORSKIE ECHOSONDY SONARY MEDYCZNE BADANIA NIENISZCZĄCE AEROAKUSTYCZNE SODARY SYSTEMY ALARMOWE

16
SYSTEMY ECHOLOKACYJNE15 Przykład klasyfikacji systemów hydrolokacyjnych według rozwiązań technicznych echosondy: jednowiązkowe, wielowiązkowe; sonary: jednowiązkowe, wielowiązkowe: czołowe (sektorowe), okrężne, boczne, -podkilowe, -opuszczane, -holowane, -stacjonarne.
, okrężne, boczne, -podkilowe, -opuszczane, -holowane, -stacjonarne.")
17
SYSTEMY ECHOLOKACYJNE16 Przykłady systemów echolokacyjnych Radar trójwspółrzędny dalekiego zasięgu Typowy radar morski

18
SYSTEMY ECHOLOKACYJNE17 Radar kontroli obszaru Policyjny radar dopplerowski

19
SYSTEMY ECHOLOKACYJNE18 Sonar aktywny dalekiego zasięgu

20
SYSTEMY ECHOLOKACYJNE19 Sonar pasywny z anteną holowaną

21
SYSTEMY ECHOLOKACYJNE20 Ultrasonografy

22
SYSTEMY ECHOLOKACYJNE21 Echolokacja u zwierząt Spektogram sygnału emitowanego przez nietoporza

23
SYSTEMY ECHOLOKACYJNE22 Spektogram sygnału emitowanego przez delfina

24
SYSTEMY ECHOLOKACYJNE23 Porównanie fal elektromagnetycznych i akustycznych Fale elektromagnetyczne : Prędkość propagacji c=300 000 km/s Tłumienie ( =0.1 m), 10 7 dB/km Fale akustyczne Woda Powietrze Prędkość propagacji c=1.5 km/s c=340 m/s Tłumienie ( =0.1 m) 1dB/km 15 –85 dB/km Dla wody 200 000 razy krótsza fala przy tej samej częstotliwości, 10 7 razy mniejsze tłumienie przy tej samej długości fali
, 10 7 dB/km Fale akustyczne Woda Powietrze Prędkość propagacji c=1.5 km/s c=340 m/s Tłumienie ( =0.1 m) 1dB/km 15 –85 dB/km Dla wody razy krótsza fala przy tej samej częstotliwości, 10 7 razy mniejsze tłumienie przy tej samej długości fali")
25
SYSTEMY ECHOLOKACYJNE24 Fala elektromagnetyczna Współczynnik tłumienia absorpcyjnego wody morskiej [dB/m]
![SYSTEMY ECHOLOKACYJNE24 Fala elektromagnetyczna Współczynnik tłumienia absorpcyjnego wody morskiej [dB/m]](http://images.slideplayer.pl/33/10235262/slides/slide_25.jpg "SYSTEMY ECHOLOKACYJNE24 Fala elektromagnetyczna Współczynnik tłumienia absorpcyjnego wody morskiej [dB/m]")
26
SYSTEMY ECHOLOKACYJNE25 wilgotność [%]
![SYSTEMY ECHOLOKACYJNE25 wilgotność [%]](http://images.slideplayer.pl/33/10235262/slides/slide_26.jpg "SYSTEMY ECHOLOKACYJNE25 wilgotność [%]")
27
SYSTEMY ECHOLOKACYJNE26 Metody określania położenia celu Systemy aktywne: namiar (kąt), odległość Systemy pasywne: dwa namiary, znana baza
, odległość Systemy pasywne: dwa namiary, znana baza")
28
SYSTEMY ECHOLOKACYJNE27 Metody przeszukiwania przestrzeni

29
SYSTEMY ECHOLOKACYJNE28 Schemat funkcjonalny systemu echolokacyjnego Nadajnik OdbiornikZobrazowanie wiązka nadawcza wiązka odbiorcza KANAŁ zakłócenia szumy

30
SYSTEMY ECHOLOKACYJNE29 Zobrazowanie

31
SYSTEMY ECHOLOKACYJNE30 Anteny radarowasonarowa

32
SYSTEMY ECHOLOKACYJNE31 PODSTAWOWE PARAMETRY EKSPLOATACYJNE SYSTEMÓW ECHOLOKACYJNYCH Zasięg Dokładność pomiaru odległości Dokładność określenia namiaru Rozdzielczość wgłębna (odległości) Rozdzielczość kątowa Sektor kątowy obserwacji Czas przeszukiwania Parametry eksploatacyjne charakteryzują system z punktu widzenia jego użytkownika.
 Rozdzielczość kątowa Sektor kątowy obserwacji Czas przeszukiwania Parametry eksploatacyjne charakteryzują system z punktu widzenia jego użytkownika.")
33
SYSTEMY ECHOLOKACYJNE32 Zasięg Zasięgiem systemu nazywamy maksymalną od- ległość, z której system wykrywa z założonym prawdopodobieństwem określony cel w istnieją- cych warunkach propagacyjnych. Zasięg zależy od: parametrów technicznych systemu, parametrów wykrywanego obiektu (siły celu), warunków propagacji fal w ośrodku, prawdopodobieństwa detekcji i fałszywego alarmu.
, warunków propagacji fal w ośrodku, prawdopodobieństwa detekcji i fałszywego alarmu..")
34
SYSTEMY ECHOLOKACYJNE33 Dokładność pomiaru odległości Pomiar odległości R c – prędkość fali w ośrodku, [m/s] T – czas między momentem emisji impulsu sondującego i momentem odbioru sygnału echa t T próg Impuls sondującyImpuls echa
![SYSTEMY ECHOLOKACYJNE33 Dokładność pomiaru odległości Pomiar odległości R c – prędkość fali w ośrodku, [m/s] T – czas między momentem emisji impulsu sondującego i momentem odbioru sygnału echa t T próg Impuls sondującyImpuls echa](http://images.slideplayer.pl/33/10235262/slides/slide_34.jpg "SYSTEMY ECHOLOKACYJNE33 Dokładność pomiaru odległości Pomiar odległości R c – prędkość fali w ośrodku, [m/s] T – czas między momentem emisji impulsu sondującego i momentem odbioru sygnału echa t T próg Impuls sondującyImpuls echa")
35
SYSTEMY ECHOLOKACYJNE34 Błąd pomiaru odległości c – błąd określenia prędkości fali T – błąd pomiaru czasu Przyczyny błędów: dynamiczne i lokalne zmiany prędkości w ośrodku, rozchodzenie się fal po liniach krzywych niejednoznaczność w ocenie momentu przyjścia impulsu echa

36
SYSTEMY ECHOLOKACYJNE35 Dokładność określenia namiaru Dokładność określenia namiaru zależy przede wszystkim od szerokości charakterystyki kierunkowej; jest tym lepsza im charakterystyka kierunkowa (wiązka) jest węższa. -3dB -3dB

37
SYSTEMY ECHOLOKACYJNE36 Szerokości wiązki w dwóch przekrojach

38
SYSTEMY ECHOLOKACYJNE37 Rozdzielczość wgłębna Rozdzielczością wgłębną nazywamy najmniejszą odległość celów (punktowych) obserwowanych pod tym samym kątem, przy której sygnały echa są rozróżnialne. Ujęcie podstawowe: - efektywny czas trwania impulsu echa na wyjściu odbiornika

39
SYSTEMY ECHOLOKACYJNE38 Rozdzielczość kątowa Rozdzielczością kątową nazywamy najmniejszy kąt między celami punktowymi, przy którym na wyjściu odbiornika możemy rozróżnić dwa oddzielne echa. Przyjmuje się zwykle, że rozdzielczość kątowa jest równa szerokości wiązki

40
SYSTEMY ECHOLOKACYJNE39 Czas przeszukiwania sektora obserwacji Przeszukiwanie pełnej przestrzeni jedną wiązką

41
SYSTEMY ECHOLOKACYJNE40 SYGNAŁY ECHOLOKACYJNE W aktywnych systemach echolokacyjnych stosuje się: sygnały wąskopasmowe – sygnały sinusoidalne o obwiedni prostokątnej lub podobnej, sygnały szerokopasmowe – sygnały z modulacją bądź kluczowaniem częstotliwości, sygnały kodowe, pseudolosowe. sygnały szerokopasmowe – sygnały sinusoidalne o bardzo krótkim czasie trwania. W systemach pasywnych odbierane są: sygnały wąskopasmowe, sygnały szerokopasmowe, losowe. Zasadnicza różnica między systemami aktywnymi i pasywnymi polega na tym, że sygnały w systemach aktywnych są znane, a w systemach pasywnych – nieznane.

42
SYSTEMY ECHOLOKACYJNE41 Sygnał wąskopasmowy Warunek: szerokość widma obwiedni A(t) dużo mniejsza od częstotliwości nośnej f o Widmo sygnału
 dużo mniejsza od częstotliwości nośnej f o Widmo sygnału")
43
SYSTEMY ECHOLOKACYJNE42 Sygnał o obwiedni prostokątnej (t/ ) t s(t) Widmo sygnału
 t s(t) Widmo sygnału")
44
SYSTEMY ECHOLOKACYJNE43 Funkcja autokorelacji Definicja funkcji korelacji:: Definicja funkcji autokorelacji Widmo funkcji autokorelacjiEnergia sygnału

45
SYSTEMY ECHOLOKACYJNE44 Przykład 0

46
SYSTEMY ECHOLOKACYJNE45 Wyznaczanie funkcji autokorelacji sygnału sinusoidalnego o obwiedni prostokątnej

47
SYSTEMY ECHOLOKACYJNE46 Sygnał z liniową modulacją częstotliwości LFM 0<t< Częstotliwość chwilowa fcfc t ff -f-f f0f0

48
SYSTEMY ECHOLOKACYJNE47 B=2 f Szerokość widma B >>1 Widmo sygnału LFM

49
SYSTEMY ECHOLOKACYJNE48 Funkcja autokorelacji sygnału z liniową modulacją częstotliwości B T=1/B

50
SYSTEMY ECHOLOKACYJNE49 Sygnał z hiperboliczną modulacją częstotliwości HFM Sygnał HFM jest bardziej odporny na efekt Dopplera niż sygnał LFM Widmo sygnału HFM

51
SYSTEMY ECHOLOKACYJNE50

52
SYSTEMY ECHOLOKACYJNE51 PRÓBKOWANIE SYGNAŁÓW ECHOLOKACYJNYCH Cel próbkowania: zamiana sygnału analogowego na sygnał cyfrowy. Etapy konwersji analogowo-cyfrowej: Sygnał analogowy Sygnał dyskretny Sygnał cyfrowy Metody próbkowania: próbkowanie bezpośrednie, próbkowanie kwadraturowe, próbkowanie bezpośrednie sygnałów dolnopasmowych po detekcji kwadraturowej. Warunek dobrego próbkowania: Zachowanie w sygnale dyskretnym pełnej informacji o sygnale analogowym.

53
SYSTEMY ECHOLOKACYJNE52 Próbkowanie bezpośrednie Widmo sygnału dyskretnego jest ciągłe i okresowe. Pełna informacja o sygnale jest zawarta w każdym okresie widma.

54
SYSTEMY ECHOLOKACYJNE53 Widmo sygnału po próbkowaniu analogowego sygnału o ograniczonym widmie Widmo sygnału po próbkowaniu analogowego sygnału o nieograniczonym widmie. Warunki dobrego próbkowania: widmo sygnału musi być ograniczone okres próbkowania musi spełniać kryterium Nyquista

55
SYSTEMY ECHOLOKACYJNE54 Próbkowanie kwadraturowe sygnałów wąskopasmowych Warunek stosowania próbkowania kwadraturowego: znajomość częstotliwości nośnej sygnału wąskopasmowego

56
SYSTEMY ECHOLOKACYJNE55 Widmo sygnału po próbkowaniu kwadraturowym Sygnał po próbkowaniu w zapisie zespolonym Widmo sygnału po próbkowaniu kwadraturowym Oszczędność przy próbkowaniu kwadraturowym Okres próbkowania kwadraturowego bezpośredniego Zysk Wynikiem próbkowania kwadraturowego jest sygnał dolnopasmowy

57
SYSTEMY ECHOLOKACYJNE56 'Próbkowanie kwadraturowe' clear close all %Dane fo=1000; %Częstotliwość nośna ti=100/fo; %Czas trwania impulsu fs=4*fo; %Częstotliwość próbkowania %Obliczenia N=ti*fs; n=0:N-1; %Próbkowanie zwykłe z częstotliwością fs=4fo x=cos(2*pi*fo*n/fs+pi/6); %Próbki sygnału o=zeros(1,4*N); %Próbki zerowe s=[x o]; %Próbki sygnału S=abs(fft(s)); %Moduł widma sygnału %Próbkowanie kwadraturowe %Pobieramy próbki "zespolone" co 5 okresów sygnału nośneg, oczyli co 20 próbek, for n=1:5*N/20; sc(n)=s(1+(n-1)*20); %próbki kosinusowe ss(n)=s(2+(n-1)*20); %próbki sinusowe end z=sc+i*ss; %próbki zespolone Z=abs(fft(z)); %moduł widma sygnału po próbkowaniu kwadraturowym
![SYSTEMY ECHOLOKACYJNE56 Próbkowanie kwadraturowe clear close all %Dane fo=1000; %Częstotliwość nośna ti=100/fo; %Czas trwania impulsu fs=4*fo; %Częstotliwość próbkowania %Obliczenia N=ti*fs; n=0:N-1; %Próbkowanie zwykłe z częstotliwością fs=4fo x=cos(2*pi*fo*n/fs+pi/6); %Próbki sygnału o=zeros(1,4*N); %Próbki zerowe s=[x o]; %Próbki sygnału S=abs(fft(s)); %Moduł widma sygnału %Próbkowanie kwadraturowe %Pobieramy próbki zespolone co 5 okresów sygnału nośneg, oczyli co 20 próbek, for n=1:5*N/20; sc(n)=s(1+(n-1)*20); %próbki kosinusowe ss(n)=s(2+(n-1)*20); %próbki sinusowe end z=sc+i*ss; %próbki zespolone Z=abs(fft(z)); %moduł widma sygnału po próbkowaniu kwadraturowym](http://images.slideplayer.pl/33/10235262/slides/slide_57.jpg "SYSTEMY ECHOLOKACYJNE56 Próbkowanie kwadraturowe clear close all %Dane fo=1000; %Częstotliwość nośna ti=100/fo; %Czas trwania impulsu fs=4*fo; %Częstotliwość próbkowania %Obliczenia N=ti*fs; n=0:N-1; %Próbkowanie zwykłe z częstotliwością fs=4fo x=cos(2*pi*fo*n/fs+pi/6); %Próbki sygnału o=zeros(1,4*N); %Próbki zerowe s=[x o]; %Próbki sygnału S=abs(fft(s)); %Moduł widma sygnału %Próbkowanie kwadraturowe %Pobieramy próbki zespolone co 5 okresów sygnału nośneg, oczyli co 20 próbek, for n=1:5*N/20; sc(n)=s(1+(n-1)*20); %próbki kosinusowe ss(n)=s(2+(n-1)*20); %próbki sinusowe end z=sc+i*ss; %próbki zespolone Z=abs(fft(z)); %moduł widma sygnału po próbkowaniu kwadraturowym")
58
SYSTEMY ECHOLOKACYJNE57 Sygnał wąskopasmowy o f o =1000 Hz i czasie trwania obwiedni prostokątnej t i =0.1 s

59
SYSTEMY ECHOLOKACYJNE58 Sygnał po próbkowaniu kwadraturowym i jego widmo. Częstotliwość próbkowania zmniejszono 20-krotnie

60
SYSTEMY ECHOLOKACYJNE59 Próbki „rzeczywiste” i „urojone” po próbkowaniu kwadraturowym. Przesunięcie fazy -30 deg.

61
SYSTEMY ECHOLOKACYJNE60 Próbki sygnału sinusoidalnego z odchyłką dopplerowską a– sygnał bez odchyłki dopplerowskiej Sygnał z odchyłką dopplerowską b - pobierane próbki c - próbki rzeczywiste d – próbki urojone

62
SYSTEMY ECHOLOKACYJNE61 Widmo sygnału sinusoidalnego o obwiedni prostokątnej z odchyłką dopplerowską po próbkowaniu kwadraturowym a – bez odchyłki dopplerowskiej b – z odchyłką dopplerowską

63
SYSTEMY ECHOLOKACYJNE62 Efekt opóźnienia sygnału Opóźniony sygnał po próbkowaniu kwadraturowym Widmo sygnału opóźnionego

64
SYSTEMY ECHOLOKACYJNE63 DETEKCJA SYGNAŁÓW ECHOLOKACYJNYCH Cel detekcji: Wykrycie znanego sygnału użytecznego s(t) w sygnale echa x(t). ODBIORNIK n(t) s(t) x(t)y(t) x(t)=s(t)+n(t) y(t)=T{x(t)} n(t) – szum, zakłócenia y(t) – sygnał na wyjściu odbiornika
 s(t) x(t)y(t) x(t)=s(t)+n(t) y(t)=T{x(t)} n(t) – szum, zakłócenia y(t) – sygnał na wyjściu odbiornika.")
65
SYSTEMY ECHOLOKACYJNE64 Warunki detekcji s(t) – użyteczny sygnał echa – deterministyczny wariant 1 skrajny – sygnał w pełni znany wariant pośrednie – sygnał częściowo znany wariant 2 skrajny– sygnał całkowicie nieznany n(t) – zakłócenia niedeterministyczne (stochastyczne) - szumy, rewerberacje x(t) – sygnał na wejściu odbiornika – stochastyczny y(t) – sygnał na wyjściu odbiornika - stochastyczny Detekcja binarna – 1 – odebrano sygnał użyteczny 0 – odebrano tylko zakłócenia Suma sygnału deterministycznego i stochastycznego jest stochastyczna
 – użyteczny sygnał echa – deterministyczny wariant 1 skrajny – sygnał w pełni znany wariant pośrednie – sygnał częściowo znany wariant 2 skrajny– sygnał całkowicie nieznany n(t) – zakłócenia niedeterministyczne (stochastyczne) - szumy, rewerberacje x(t) – sygnał na wejściu odbiornika – stochastyczny y(t) – sygnał na wyjściu odbiornika - stochastyczny Detekcja binarna – 1 – odebrano sygnał użyteczny 0 – odebrano tylko zakłócenia Suma sygnału deterministycznego i stochastycznego jest stochastyczna")
66
SYSTEMY ECHOLOKACYJNE65 Decyzje podejmowane na wyjściu odbiornika i ich prawdopodobieństwa sn DecyzjaPrwadopo- dobieństwo DecyzjaPrwadopo- dobieństwo 111PDPD 01-P D 011P FA 01-P FA P D – prawdopodobieństwo detekcji P FA – prawdopodobieństwo fałszywego alarmu Nadrzędny cel systemu: zapewnienie maksymalnej wartości P D i minimalnej wartości P FA. Cele te są z natury sprzeczne – konieczny jest kompromis (optymalizacja)
.")
67
SYSTEMY ECHOLOKACYJNE66 Detekcja sygnału stałego na tle szumu gaussowskiego Kryterium Neymana-Pearsona p 1 (y) –rozkład prawdopodobieństwa sygnału na wyjściu odbiornika, gdy na wejściu pojawia się sygnał echa p 0 (y) –rozkład prawdopodobieństwa sygnału na wyjściu odbiornika, gdy na wejściu istnieje tylko szum - wartość stałego sygnału użytecznego Detekcja polega na decyzji, czy w sygnale odebranym jest stały sygnał użyteczny. y= - próg detekcji

68
SYSTEMY ECHOLOKACYJNE67 Stosunek sygnału do szumu na wyjściu odbiornika SNR y = 2 / 2 Można tak ustawić próg detekcji , aby kryterium N-P miało założoną wartość. Stosunek sygnału do szumu jest równy ilorazowi mocy sygnału użytecznego do wariancji szumu. Definicja ogólna Definicja w typowym przypadku szczególnym

69
SYSTEMY ECHOLOKACYJNE68 Prawdopodobieństwo detekcji i fałszywego alarmu

70
SYSTEMY ECHOLOKACYJNE69 Krzywe operacyjne odbiornika Prawdopodobieństwo fałszywego alarmu Prawdopodobieństwo detekcji d=SNR y Znormalizowany próg detekcji

71
SYSTEMY ECHOLOKACYJNE70 Odbiór sygnału stochastycznego na tle szumu gaussowskiego p 0 – rozkład szumu p s – rozkład sygnału p 1 – rozkład sygnału z szumem 12=o2+s2.12=o2+s2. Przykład: szum i sygnał są gaussowskie Porównanie detekcji sygnału o stałej wartości (poprzedni przypadek) i sygnału stochastycznego o wartości średniej równej wartości stałej poprzedniego sygnału. Szum w obu wypadkach jest jednakowy. Czym nasza wiedza o sygnale jest mniejsza, tym jego detekcja jest trudniejsza.
 i sygnału stochastycznego o wartości średniej równej wartości stałej poprzedniego sygnału. Szum w obu wypadkach jest jednakowy. Czym nasza wiedza o sygnale jest mniejsza, tym jego detekcja jest trudniejsza..")
72
SYSTEMY ECHOLOKACYJNE71 p FA =p 0 *p s Wniosek: Prawdopodobieństwo detekcji sygnału stochastycznego jest mniejsze, a prawdopodobieństwa fałszywego alarmu są jednakowe.

73
SYSTEMY ECHOLOKACYJNE72 Detekcja znanego sygnału na tle szumu gaussowskiego x 1 (t)=s(t)+n(t) x 0 (t)=n(t) Struktura odbiornika optymalnego Odbiornik korelacyjny 1 - Znany sygnał użyteczny s(t) + szum gaussowski 0 - Odbiór tylko szumu Funkcja autokorelacji x(t)=s(t)
=s(t)+n(t) x 0 (t)=n(t) Struktura odbiornika optymalnego Odbiornik korelacyjny 1 - Znany sygnał użyteczny s(t) + szum gaussowski 0 - Odbiór tylko szumu Funkcja autokorelacji x(t)=s(t)")
74
SYSTEMY ECHOLOKACYJNE73 Odbiór impulsu prostokątnego

75
SYSTEMY ECHOLOKACYJNE74 Własności statystyczne sygnału na wyjściu odbiornika korelacyjnego Próbki sygnału odebranego Histogram – rozkład gęstości prawdopodobieństwa krzywa Gaussa Wniosek: Można oszacować prawdopodobieństwa detekcji i fałszywego alarmu podaną wyżej metodą.

76
SYSTEMY ECHOLOKACYJNE75 Stosunek sygnału do szumu na wejściu i wyjściu odbiornika – „wzmocnienie przetwarzania” E( )-energia sygnału w momencie czasu N – widmowa gęstość mocy szumów Stosunek sygnału do szumu na wyjściu odbiornika korelacyjnego jest równy ilorazowi energii sygnału i widmowej gęstości mocy szumów.
-energia sygnału w momencie czasu N – widmowa gęstość mocy szumów Stosunek sygnału do szumu na wyjściu odbiornika korelacyjnego jest równy ilorazowi energii sygnału i widmowej gęstości mocy szumów.")
77
SYSTEMY ECHOLOKACYJNE76 Stosunek sygnału do szumu na wejściu odbiornika E( )=P s Wniosek: Korzystne jest stosowanie sygnałów o dużym iloczynie czasu trwania i szerokości widma. Iloczyn ten należy zwiększać przez wydłużanie czasu trwania sygnału, gdyż wówczas rośnie jego energia. Szerokość widma jest zwykle ograniczona ze względów technicznych. Odbiornik korelacyjny zwiększa wejściowy stosunek sygnału do szumu proporcjonalnie do iloczyny szerokości widma sygnału i jego czasu trwania.

78
SYSTEMY ECHOLOKACYJNE77 Odbiornik dopasowany do sygnału użytecznego k(t) x(t) y(t) k(t) – odpowiedź impulsowa filtru dopasowanego Równoważność z odbiornikiem korelacyjnym Jest to wersja teoretyczna, gdyż wymaga zmian położenia odpowiedzi impulsowej w funkcji czasu lub znajomości czasu pojawienia się sygnału na wejściu odbiornika.
 x(t) y(t) k(t) – odpowiedź impulsowa filtru dopasowanego Równoważność z odbiornikiem korelacyjnym Jest to wersja teoretyczna, gdyż wymaga zmian położenia odpowiedzi impulsowej w funkcji czasu lub znajomości czasu pojawienia się sygnału na wejściu odbiornika.")
79
SYSTEMY ECHOLOKACYJNE78 Odpowiedź impulsowa filtru dopasowanego Funkcja przenoszenia filtru dopasowanego Realizacja filtru dopasowanego w dziedzinie częstotliwości

80
SYSTEMY ECHOLOKACYJNE79 sygnał szum Wariancja szumu Sygnał użyteczny na wyjściu filtru dopasowanego Stosunek sygnału do szumu na wyjściu filtru dopasowanego

81
SYSTEMY ECHOLOKACYJNE80 Detekcja sygnałów o nieznanych parametrach Sygnał o nieznanym momencie pojawienia się na wejściu odbiornika k(t)=s(-t) Odpowiedź impulsowa filtru dopasowanego Sygnał na wyjściu filtru Widmo Opóźniona funkcja autokorelacji plus szum.
=s(-t) Odpowiedź impulsowa filtru dopasowanego Sygnał na wyjściu filtru Widmo Opóźniona funkcja autokorelacji plus szum.")
82
SYSTEMY ECHOLOKACYJNE81 Filtracja dopasowana dla opóźnionego impulsu prostokątnego (dwie realizacje szumów)
")
83
SYSTEMY ECHOLOKACYJNE82 Prawdopodobieństwa detekcji i fałszywego alarmu przy nieznanym momencie pojawienia się sygnału użytecznego 0 T t Sygnał obserwujemy przez długi czas T. Czas trwania sygnału na wyjściu odbiornika wynosi . Prawdopodobieństwo detekcji nie zależy od czasu obserwacji T. Prawdopodobieństwo fałszywego alarmu obliczamy następująco: Przykład: Dopuszczamy jeden fałszywy alarm w ciągu 1 godz. obserwacji. Czas trwania sygnału użytecznego wynosi 3 ms. Prawdopodobieństwo fałszywego alarmu według podanych kryteriów detekcji wynosi:

84
SYSTEMY ECHOLOKACYJNE83 Odbiór sygnałów sinusoidalnych o nieznanych parametrach Znane wszystkie parametry

85
SYSTEMY ECHOLOKACYJNE84 Nieznana faza Wniosek: Detekcja progowa jest niemożliwa

86
SYSTEMY ECHOLOKACYJNE85 Transformacja Fouriera jako realizacja filtracji dopasowanej do sygnału sinusoidalnego Odbieramy sygnał sinusoidalnych o nieznanej amplitudzie A, częstotliwości f o i fazie . Pobieramy N próbek sygnału z częstotliwością f s i obliczamy numerycznie widmo. Mamy: Prawy, maksymalny prążek widma występuje dla k o równego:

87
Dla tego prążka mamy: Kwadrat modułu prążka (wartość periodogramu dla k 0 ): Wynik jest proporcjonalny do energii odebranego sygnału, co jest charakterystyczne dla odbioru korelacyjnego.
: Wynik jest proporcjonalny do energii odebranego sygnału, co jest charakterystyczne dla odbioru korelacyjnego.")
88
SYSTEMY ECHOLOKACYJNE87

89
SYSTEMY ECHOLOKACYJNE88 Rozrzut wysokości prążka widma spowodowany szumem

90
SYSTEMY ECHOLOKACYJNE89 Rozkład gęstości prawdopodobieństwa wysokości prążka widma sygnału sinusoidalnego i szumu gaussowskiego

91
SYSTEMY ECHOLOKACYJNE90 Rozkład gęstości prawdopodobieństwa prążka periodogramu

92
Fale akustyczne Falą akustyczną nazywamy zachodzące w czasie i w przestrzeni zmiany stanu równowagi ośrodka sprężystego. Cechy ośrodka warunkujące rozchodzenie się fal akustycznych to: bezwładność i sprężystość. Fale akustyczne opisują: - ciśnienie akustyczne [Pa] - prędkość akustyczna [m/s] - potencjał akustyczny [m 2 /s]

93
Podstawowe równania Równanie ciągłości - gęstość [kg/m 3 ] Równanie Eulera Równanie stanu Równanie falowe
![Podstawowe równania Równanie ciągłości - gęstość [kg/m 3 ] Równanie Eulera Równanie stanu Równanie falowe](http://images.slideplayer.pl/33/10235262/slides/slide_93.jpg "Podstawowe równania Równanie ciągłości - gęstość [kg/m 3 ] Równanie Eulera Równanie stanu Równanie falowe")
94
Fale płaskie, cylindryczne i sferyczne Fala płaska Fala cylindryczna Fala sferyczna Charakterystyczna impedancja akustyczna Natężenia fali akustycznej [W/m 2 ] Moc fali akustycznej [W]
![Fale płaskie, cylindryczne i sferyczne Fala płaska Fala cylindryczna Fala sferyczna Charakterystyczna impedancja akustyczna Natężenia fali akustycznej [W/m 2 ] Moc fali akustycznej [W]](http://images.slideplayer.pl/33/10235262/slides/slide_94.jpg "Fale płaskie, cylindryczne i sferyczne Fala płaska Fala cylindryczna Fala sferyczna Charakterystyczna impedancja akustyczna Natężenia fali akustycznej [W/m 2 ] Moc fali akustycznej [W]")
95
Fale sinusoidalne Fala płaska Liczba falowa Zapis zespolony Równanie Helmholtza

96
Płaskie anteny hydroakustyczne Wzór Kirchhoffa

97
Wzór Rayleigha dla płaskich powierzchni promieniujących w nieskończonej, sztywnej odgrodzie.

98
Pole bliskie i dalekie

99
Numeryczne wyznaczanie rozkładu ciśnienia w polu bliski.

100
W polu bliskim główna część promieniowanej mocy zawarta jest w graniastosłupie o przekroju w kształcie powierzchni promieniującej Granica pola bliskiego Kwadratowa powierzchnia promieniująca o bokach 0, 3 0 i 9 0 i stałej amplitudzie prędkości V n. Kwadratowa powierzchnia promieniująca o bokach 2 0, 4 0 i 5 0 i stałej amplitudzie prędkości V n.

101
Pole dalekie

102
Charakterystyka kierunkowa Definicja Ciśnienie na osi akustycznej anteny Wzór do wyznaczanie charakterystyki kierunkowej

103
Charakterystyka kierunkowa powierzchni prostokątnej o stałym rozkładzie prędkości drgań l x =2a długość boku prostokąta l y =2b długość boku prostokąta

104
l x =2a=3 0 l y =2b=2 0.

105
Przekroje charakterystyki kierunkowej

106
Technika obliczania przekrojów charakterystyk kierunkowych Zmiana układu współrzędnych

107
Charakterystyka kierunkowa w obróconym układzie współrzędnych Liniowy rozkład prędkości drgań Przekrój charakterystyki kierunkowej

108
Sposób wyznaczania rozkładu V’(x’) przy stałym rozkładzie prędkości
 przy stałym rozkładzie prędkości")
109
Charakterystyka kierunkowa powierzchni kołowej Szerokość wiązki

110
Zastosowanie przekształcenia Fouriera do wyznaczanie charakterystyk kierunkowych Podstawowy wzór do obliczania jednowymiarowej charakterystyki kierunkowej Normalizacja wymiaru x względem długości fali Nowe zmienne znormalizowana długość częstotliwość przestrzenna pulsacja przestrzenna

111
Przykłady zastosowania przekształcenia Fouriera do wyznaczania charakterystyk kierunkowych powierzchni płaskich Powierzchni prostokątna – V(x,y)=const rozkład widmo przestrzenne charakterystyka kierunkowa
=const rozkład widmo przestrzenne charakterystyka kierunkowa")
112
Widmo przestrzenne

113
Parametry charakterystyki kierunkowej 3-decybelowa szerokość wiązki Zera widma przestrzennego Maksima widma przestrzennego Poziom listków bocznych Liczba listków bocznych

114
Wykres logarytmiczny charakterystyki kierunkowej

115
Charakterystyka kierunkowa dla rozkładu trójkątnego Długość podstawy trójkąta Rozkład trójkątny jako splot rozkładów prostokątnych Widmo przestrzenne

116
Charakterystyka kierunkowa dla rozkładu trapezowego Rozkład drgań Widmo przestrzenne

117
Twierdzenie o przesunięciu Widmo przestrzenne- postać końcowa Zależności trygonometryczne Charakterystyka kierunkowa

118
Wieloelementowe anteny płaskie Rozkład prędkości na powierzchni anteny

119
Przykładowe rozkłady V n ’(x’) dla anteny kwadratowej a)Przekrój wzdłuż symetralnych b)Przekrój wzdłuż przekątnych c)Wybrany przekrój specjalny
 dla anteny kwadratowej a)Przekrój wzdłuż symetralnych b)Przekrój wzdłuż przekątnych c)Wybrany przekrój specjalny")
120
Rozkład wzdłuż dowolnego przekroju z wyjątkiem charakterystycznych

121
Charakterystyki kierunkowe dla rozkładów równomiernych Rozkład drgań d x’ – odległość impulsów Diraca Rozkład zapisany w konwencji przekształcenia Fouriera Widmo przestrzenne s =2 /d

122
Widmo przestrzenne źródeł punktowych Charakterystyka kierunkowa

123
Zasada mnożenia charakterystyk kierunkowych Warunek braku listków dyfrakcyjnych w zakresie kątów widzialnych s =2 /d 4 d 1/2d x /2 Łagodny warunek braku listków dyfrakcyjnych w zakresie kątów widzialnych d x

124
Antena wieloelementowa, której dotyczy zasada wymnażania charakterystyk kierunkowych

126
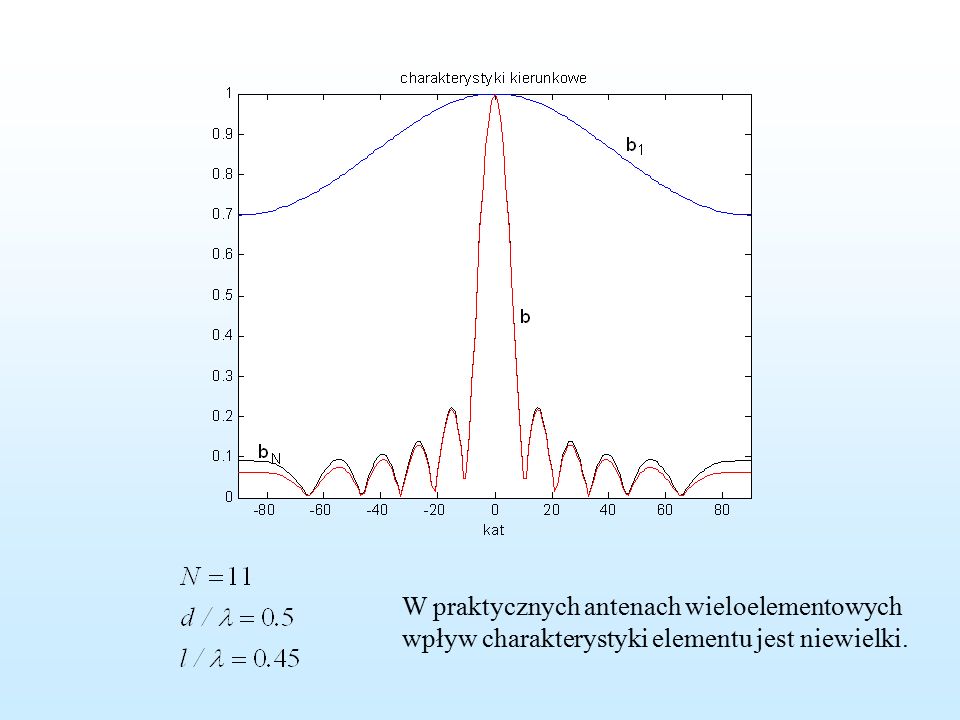
W praktycznych antenach wieloelementowych wpływ charakterystyki elementu jest niewielki.

127
Ważenie amplitudowe Ważenie amplitudowe stosuje się w celu redukcji poziomu listków bocznych. w(n) – współczynniki ważenia amplitudowego (<=1) realizowane we wzmacniaczach, tłumikach lub cyfrowo w(n) – dyskretna funkcja okna, często w formie „cosinus na piedestale”
 – współczynniki ważenia amplitudowego (<=1) realizowane we wzmacniaczach, tłumikach lub cyfrowo w(n) – dyskretna funkcja okna, często w formie „cosinus na piedestale .")
129
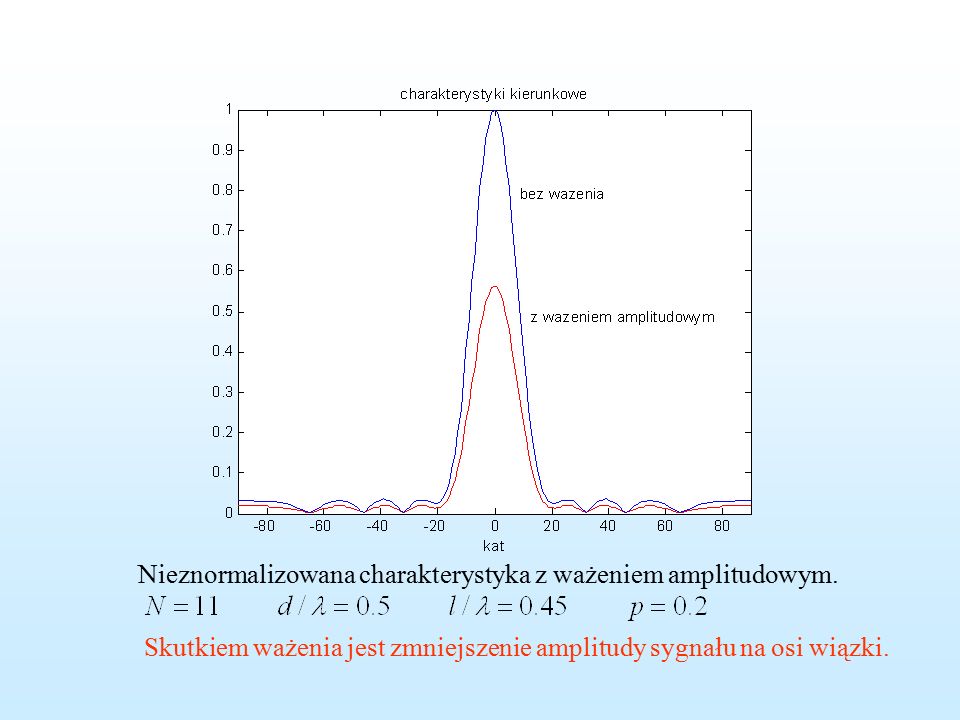
Nieznormalizowana charakterystyka z ważeniem amplitudowym. Skutkiem ważenia jest zmniejszenie amplitudy sygnału na osi wiązki.

130
Skutki ważenia amplitudowego: -redukcja poziomu listków bocznych (pozytywny) -zwiększenie szerokości wiązki (negatywny)
 -zwiększenie szerokości wiązki (negatywny)")
131
Wykres logarytmiczny (20log(b)) charakterystyk z poprzedniej strony. Uwaga: Aby powrócić do szerokości wiązki bez ważenia, należy zwiększyć długość anteny (zwiększyć liczbę elementów).
..")
132
Elektroniczne odchylanie wiązki

133
Zasada elektronicznego odchylania wiązki Sygnał na wyjściu n-tego elementu anteny Opóźnienie „geometryczne” Opóźnienie w liniach opóźniających Sygnał na wyjściu sumatora

134
SYSTEMY ECHOLOKACYJNE Charakterystyka kierunkowa z odchyloną wiązką Charakterystyka kierunkowa z ważeniem amplitudowym i odchyloną wiązką gdzie Wartość ta jest mniejsza od N, gdyż maksymalna wartość sygnału na osi wiązki jest mniejsza od N (dla sygnału o jednostkowej amplitudzie.

135
SYSTEMY ECHOLOKACYJNE134 Charakterystyka kierunkowa z odchyloną wiązką bez ważenia amplitudowego.

136
SYSTEMY ECHOLOKACYJNE135 Funkcja ważenia amplitudowego p=0.4 Charakterystyka z odchy- loną wiązką i ważeniem

137
SYSTEMY ECHOLOKACYJNE136 Charakterystyki kierunkowe z ważeniem i bez ważenia Odchylenie wiązki powoduje wzrost jej szerokości, tym większy, im większy jest kąt odchylenia. W przykładzie z rysunku szerokość wzrosła z 7 deg do 9 deg.

138
SYSTEMY ECHOLOKACYJNE137 Przykłady źle zaprojektowanych anten Antena o zbyt dużej odległości elementów Pojawia się listek dyfrakcyjny

139
SYSTEMY ECHOLOKACYJNE138 Zbyt duży kąt odchylenia wiązki Szerokość wiązki wzrosła z 7 deg do 16 deg Uwaga: Ważenie amplitudowe nie wpływa na redukcję listków dyfrakcyjnych

140
Uwagi o technicznej realizacji odchylenia wiązki SYSTEMY ECHOLOKACYJNE139 W systemach analogowych, przy nadawaniu i odbiorze sygnałów wąskopasmowych można zastąpić opóźnienia przez przesunięcia fazy: Potrzebne przesunięcia fazy zawierają się w zakresie od O do 360 deg, co jest trudne do zrealizowania w przesuwnikach fazy. W systemach cyfrowych łatwo realizuje się opóźnienie pod warunkiem, że jest ono wielokrotnością okresu próbkowania. W celu zapewnienia wystarczającej dokładności potrzebnych opóźnień, konieczna jest bardzo duża częstotliwość próbkowania. Z tego względu stosuje się różne inne techniki, o których będzie mowa przy omawianiu systemów wielowiązkowych.

141
ECHOLOKACYJNE SYSTEMY WIELOWIĄZKOWE SYSTEMY ECHOLOKACYJNE140 Systemy wielowiązkowe wytwarzają jednocześnie liczne wąskie, odchylone wiązki pokrywające szeroki sektor obserwacji. Stosowane są w celu skrócenia czasu obserwacji. W stosunku do systemów z poje- dynczą wiązką czas obserwacji skraca się co najmniej tyle razy ile wytwarzanych jest jednocześnie wiązek. Są stosowane przede wszystkim w hydrolokacji ze względu na duże zasięgi i małą prędkość propagacji fali akustycznej. Ogólna zasada pracy systemów wielowiązkowych polega na równoległym podłączeniu do elementów anteny opisanych wyżej układów odchylania wiązki. Każdy z takich układów odchyla wiązkę o inny, zadany kąt. Wiązki przylegają do siebie i pokrywają cały założony kątowy sektor obserwacji. Pojedyncze wiązki są wąskie, co zapewnia pożądaną, dobrą rozdzielczość kątową systemu.

142
SYSTEMY ECHOLOKACYJNE141 Istotnymi blokami całego systemu wielowiązkowego są antena wieloelementowa i wielowiązkowy filtr przestrzenny – beamformer, których ogólną idee funkcjonowania pokazuje rysunek. Beamformer pokazany na rysunku wytwarza zespół wiązek w „płaszczyźnie” prostopadłej do anteny i przechodzącej przez jedną z jej symetralnych. W „płaszczyźnie” przechodzącej przez drugą symetralną mamy praktycznie jedną wąską wiązkę o szerokości wynikającej z odpowiedniego przekroju anteny.

143
SYSTEMY ECHOLOKACYJNE142 Płaska antena wieloelementowa systemów wielowiązkowych Elementy w kolumnach są zwarte. Beamformer wytwarza zespół wiązek w płaszczyźnie przechodzącej przez oś X i prostopadłej do powierzchni anteny. Szerokość wiązek w przekroju Y wynika z długości tego przekroju.

144
Układ wiązek wielowiązkowej echosondy SYSTEMY ECHOLOKACYJNE143

145
SYSTEMY ECHOLOKACYJNE144 Budowa odbiornika dwuwymiarowego systemu wielowiązkowego Beamformer pokazany na rysunku może wytwarzać zespołu wiązek w obu przekrojach. Pokrywają one wtedy dwuwymiarowy, katowy sektor obserwacji. Są bardzo rzadko stosowane ze ze względu na duże koszty. Liczba niezależnych kanałów BOA i beamformera jest równa liczbie niezależnych elementów anteny. Gdy beamformer wytwarza odchylone wiązki tylko w płaszczyźnie poziomej lub tylko w płaszczyźnie pionowej, wówczas liczba kanałów jest równa odpowiednio liczbie kolumn lub liczbie wierszy anteny. W beamformerze wytwarzającym wiązki w jednej płaszczyźnie liczba opóźnień L (przesunięć fazy) jest iloczynem liczby wiązek W i liczby niezależnych elementów anteny N: L=WN (zwykle kilkaset).
 jest iloczynem liczby wiązek W i liczby niezależnych elementów anteny N: L=WN (zwykle kilkaset)..")
146
SYSTEMY ECHOLOKACYJNE145 Wpływ skończonych wymiarów elementów anteny na charakterystyki kierunkowe beamformera Wiązki są tym szersze im są bardziej odchylone od wiązki centralnej

147
SYSTEMY ECHOLOKACYJNE146 Wpływ ważenia amplitudowego na charakterystyki kierunkowe beamformera Ważenie amplitudowe nie redukuje poziomu listków dyfrakcyjnych

148
SYSTEMY ECHOLOKACYJNE147 Klasyfikacja beamformerów Tablica 9.1. Rodzaje beamformerów Ze względu na metodę : opóźnieniowo-sumacyjne, z estymacją widma przestrzennego. Ze względu na technikę realizacji: analogowe, cyfrowe. Ze względu na rodzaj odbieranych sygnałów: wąskopasmowe, szerokopasmowe. Ze względu na dziedzinę przetwarzania sygnałów: pracujące w dziedzinie czasu, pracujące w dziedzinie częstotliwości.

149
SYSTEMY ECHOLOKACYJNE148 Bemformery cyfrowe Podział: Bemformery pracujące w dziedzinie czasu: - z nadpróbkowaniem, - interpolacyjne. Bemformery pracujące w dziedzinie częstotliwości: - wąskopasmowe, - szerokopasmowe. Beamformery z estymacją widma przestrzennego

150
SYSTEMY ECHOLOKACYJNE149 Bemformery cyfrowe pracujące w dziedzinie czasu Sygnał analogowy na wyjściu n-tego elementu anteny Próbkowanie sygn ału i – numer próbki Opóźnienie geometryczne sygnału wyrażone liczbą próbek. Opóźnienie musi być liczbą naturalną, aby je można było skompensować w beamformerze cyfrowym. W tych beamformerach jest realizowane cyfrowo opóźnienie odbieranych sygnałów, w związku z czym nadają się do sygnałów dolnopasmowych i szerokopasmowych.

151
SYSTEMY ECHOLOKACYJNE150 Zgodnie z twierdzeniem Nyquista częstotliwość próbkowania co najmniej równa podwojonej częstotliwości górnej widma sygnału. Dla sygnałów o bardzo wąskim widmie można w przybliżeniu przyjąć, że F sN = 2 f 0 i wtedy: f 0 – częstotliwość nośna sygnału echa F s – częstotliwość próbkowania Ze względu na funkcję sinus liczba próbek nie może być liczbą naturalną. Należy zwiększyć częstotliwość próbkowania. W beamformerach k =k 1 i dla niedużych odchyleń mamy:

152
SYSTEMY ECHOLOKACYJNE151 Żeby liczba próbek była naturalna musi być spełniona równość: Przykładowo, przy wiązce o szerokości 1 = 2 0, częstotliwość próbkowania musi być około 30 – krotnie wyższa od częstotliwości Nyquista. W konsekwencji tyle razy musi wzrosnąć pojemność pamięci komputera realizującego beamforming w stosunku do pamięci potrzebnej przy zwykłym próbkowaniu.

153
SYSTEMY ECHOLOKACYJNE152 Bemformer interpolacyjny Można sygnał próbkować z częstotliwością Nyquista i stosować interpolację. Interpolacja polega na: wstawianiu zer między fizycznymi próbkami cyfrowej filtracja dolnopasmowej Stosuje się filtry FIR ze względu na brak przesuwania fazy. Zapotrzebowanie na pamięć nie maleje.

154
SYSTEMY ECHOLOKACYJNE153 Cyfrowe beamformery wąskopasmowe Próbki poddawane są transformacji Hilberta, w wyniku czego otrzym ujemy W cyfrowych beamformerach wąskopasmowych opóźnienia zastąpione są przesunięciami fazy. Analogowy sygnał odebrany przez n-ty element anteny Próbki sygnału pobierane z częstotliwością f s Algorytm wyznaczania sygnału w k-tej wiązce

155
SYSTEMY ECHOLOKACYJNE154 Jeżeli przyjmiemy, że wszystkie amplitudy sygnałów są jednakowe i zaniedbamy opóźnienia obwiedni, to ze znanej tożsamości trygonometrycznej mamy: Fazy są skompensowane dla kątów o numerach k, gdyż Amplituda sygnału jest proporcjonalna do charakterystyki kierunkowej wiązki odchylonej o kąt k. Ekspozycja sygnałów wymaga detekcji obwiedni.

156
SYSTEMY ECHOLOKACYJNE155 Schemat funkcjonalny cyfrowego beamformera fazowego

157
SYSTEMY ECHOLOKACYJNE156 Wąskopasmowy beamformer cyfrowy z detekcją kwadraturową Próbki sygnału po detekcji kwadraturowej Beamformery takie stosuje się w celu obniżenia częstotliwości próbkowania a tym – zmniejszenia potrzebnej pamięci w komputerze i przyspieszenia obliczeń. Analogowy sygnał odebrany przez n-ty element anteny Tworzymy próbki zespolone

158
SYSTEMY ECHOLOKACYJNE157 Po wstawieniu otrzymujemy : Algorytm wyznaczania sygnału w k-tej wiązce Oznaczamy: Dla każdej i-tej próbki mamy: n=1,2,3,…,N numer wiązki k=1,2,3,…,K n – numery elementów anteny

159
SYSTEMY ECHOLOKACYJNE158 S=ws Zapis macierzowy algorytmu beamformera Liczba operacji arytmetycznych na liczbach zespolonych przypadających na jeden cykl próbkowania i. Liczba mnożeń = NK Liczba sumowań = (N-1)K Liczba operacji arytmetycznych na liczbach rzeczywistych Liczba mnożeń = 4NK Liczba sumowań =3NK+2(N-1)K=5NK-2K W celu dokonania detekcji i ekspozycji wyników należy obliczyć moduł każdej próbki S(k) (lub kwadrat modułu).
K Liczba operacji arytmetycznych na liczbach rzeczywistych Liczba mnożeń = 4NK Liczba sumowań =3NK+2(N-1)K=5NK-2K W celu dokonania detekcji i ekspozycji wyników należy obliczyć moduł każdej próbki S(k) (lub kwadrat modułu)..")
160
SYSTEMY ECHOLOKACYJNE159 Liczba operacji = 7K + pierwiastkowanie Przykład: Częstotliwość nośna f 0 =50 kHz Szerokość pasma B=5 kHz Liczba elementów anteny N=30 Liczba wiązek K=30 Liczba operacji dla jednego cyklu próbkowania L=9NK=9x900=8100 Częstotliwość próbkowania F=4xB=20 kHz Liczba operacji w czasie sekundy LxF=160 MHz Czas na jedną operację t=1/160 MHz=6 ns

161
SYSTEMY ECHOLOKACYJNE160 Estymacja widma przestrzennego Podstawy metody Ciśnienie akustyczne na linii prostej X 0 kk kk x Rozkład ciśnienia w chwili czasu t=t 0 ( 0 t 0 = 0 ) Zmienna (odpowiednik czasu) - iloraz x/ 0,. Częstotliwość rozkładu ciśnienia jest równa F k =sin k - częstotliwość przestrzenna, Pulsacja k =2 F k.– pulsacja przestrzenna

162
SYSTEMY ECHOLOKACYJNE161 Próbkowanie przestrzenne – pobieranie próbek przez elementy anteny w pewnym momencie czasu. Wartości próbek Kryterium Nyquista w odniesieniu do przestrzeni

163
SYSTEMY ECHOLOKACYJNE162 t=t 0 t=t 0 +T 0 /4 Postać zespolona próbek Pobieramy parę próbek co ćwierć okresu sygnału sinusoidalnego Dysponując tylko próbkami z dwóch elementów anteny można wyznaczyć amplitudę sygnału i kąt padania fali (częstotliwość przestrzenną).
.")
164
SYSTEMY ECHOLOKACYJNE163 Przypadek ogólny K fal o tej samej częstotliwości padających po różnymi kątami Widmo ciągłe ciągu próbek Kąt padania fali (namiar na cel) obliczamy jako: Widmo takie można wyznaczyć analitycznie. Odnosi się ono do anteny dyskretnej o nieskończonej długości. Ma zatem tylko charakter poglądowy wyjaśniający istotę problemu.

165
SYSTEMY ECHOLOKACYJNE164 Widmo przestrzenne dla trzech źródeł (celów)
")
166
SYSTEMY ECHOLOKACYJNE165 Dla dyskretnych anten o skończonej liczbie elementów M otrzymujemy widmo opisane poniższym wzorem i pokazane na rysunku. Skutkiem skończonej długości anteny jest rozmycie prążków widma. Widmo ma kształt odchylonych charakterystyk kierunkowych – takich jak w beamformerze. Rozdzielczość widma przestrzennego jest podobna do rozdzielczości kątowej w beamformerze, jeżeli antena jest taka sama.

167
SYSTEMY ECHOLOKACYJNE166 Realizacja cyfrowa estymacji widma przestrzennego dyskretną transformację Fouriera: (M=32, d/ 0 =0.5, p 1 =1 Pa, 1 = -30 0, p 2 =1 Pa, 2 = 32 0 ) Granica opłacalności stosowania transformaty Fouriera zamiast beamformingu N 32 W praktyce widmo przestrzenne obliczmy wykorzystując
 Granica opłacalności stosowania transformaty Fouriera zamiast beamformingu N 32 W praktyce widmo przestrzenne obliczmy wykorzystując")
168
SYSTEMY ECHOLOKACYJNE167 Wysokorozdzielcze metody estymacji widma przestrzennego Podstawowa idea – metoda predykcji liniowej Hipoteza idealistyczna s(n-p) – próbki znane (zmierzone) s(n) – próbka wyznaczana jest równa próbce rzeczywistej (zmierzonej ) Hipoteza realistyczna błąd Wysokorozdzielcze metody estymacji widma przestrzennego stosuje się w celu poprawy rozdzielczości kątowej w stosunku do beamformerów i metody Fouriera.
 – próbki znane (zmierzone) s(n) – próbka wyznaczana jest równa próbce rzeczywistej (zmierzonej ) Hipoteza realistyczna błąd Wysokorozdzielcze metody estymacji widma przestrzennego stosuje się w celu poprawy rozdzielczości kątowej w stosunku do beamformerów i metody Fouriera.")
169
SYSTEMY ECHOLOKACYJNE168 Widmo (dla szumu białego) Widmo gęstości mocy (energii) Bieguny |S(k)| 2 określają częstotliwości przestrzenne (sinusy kątów padania fali) Przebieg widma gęstości mocy jest całkowicie określony wyłącznie przez współczynniki a p. Metody estymacji widma sprowadzają się do wyznaczania współczynników a p ze zmierzonych próbek s(n-p).
..")
170
SYSTEMY ECHOLOKACYJNE169 %Program oblicza PSD metodą Burga dla trzech sygnałów sinusidalnych pobranych kwadraturowo z 32 elementów anteny % Model 8 rzędu % SNR=12 dB dla największej sinusoidy C=zeros(10,256); for m=1:100; x=1:32; s1=1.4*exp(i*(pi*x*sin(pi*30/180))); s2=1*exp(i*(pi*x*sin(pi*60/180))); s3=0.7*exp(i*(-pi*x*sin(+pi*45/180))); s=s1+s2+s3+0.25*randn(1,32)+i*0.25*randn(1,32); P=pburg(s,8)'; A=P(1:128); B=P(129:256); C(m,:)=[B A]; end Y=sum(C); YA=Y.^0.5; MY=max(YA); skala=-1+1/128:1/128:1; plot(skala,YA/MY,'k')
![SYSTEMY ECHOLOKACYJNE169 %Program oblicza PSD metodą Burga dla trzech sygnałów sinusidalnych pobranych kwadraturowo z 32 elementów anteny % Model 8 rzędu % SNR=12 dB dla największej sinusoidy C=zeros(10,256); for m=1:100; x=1:32; s1=1.4*exp(i*(pi*x*sin(pi*30/180))); s2=1*exp(i*(pi*x*sin(pi*60/180))); s3=0.7*exp(i*(-pi*x*sin(+pi*45/180))); s=s1+s2+s3+0.25*randn(1,32)+i*0.25*randn(1,32); P=pburg(s,8) ; A=P(1:128); B=P(129:256); C(m,:)=[B A]; end Y=sum(C); YA=Y.^0.5; MY=max(YA); skala=-1+1/128:1/128:1; plot(skala,YA/MY, k )](http://images.slideplayer.pl/33/10235262/slides/slide_170.jpg "SYSTEMY ECHOLOKACYJNE169 %Program oblicza PSD metodą Burga dla trzech sygnałów sinusidalnych pobranych kwadraturowo z 32 elementów anteny % Model 8 rzędu % SNR=12 dB dla największej sinusoidy C=zeros(10,256); for m=1:100; x=1:32; s1=1.4*exp(i*(pi*x*sin(pi*30/180))); s2=1*exp(i*(pi*x*sin(pi*60/180))); s3=0.7*exp(i*(-pi*x*sin(+pi*45/180))); s=s1+s2+s3+0.25*randn(1,32)+i*0.25*randn(1,32); P=pburg(s,8) ; A=P(1:128); B=P(129:256); C(m,:)=[B A]; end Y=sum(C); YA=Y.^0.5; MY=max(YA); skala=-1+1/128:1/128:1; plot(skala,YA/MY, k )")
171
SYSTEMY ECHOLOKACYJNE170 Zaleta metody estymacji widma: znaczna poprawa rozdzielczości kątowej Główne wady: mała odporność na szumy generacja fałszywych biegunów liczba biegunów zależna od rzędu modelu P trudności z dobraniem właściwego rzędu modelu Zbyt niski rząd modelu – zlewanie się prążków, zbyt duży – pojawianie się fałszywych prążków.

172
SYSTEMY ECHOLOKACYJNE171 Równanie zasięgu Cel równania zasięgu: Określenie parametrów technicznych systemu, które zapewnią wykrycie danego obiektu z założonym prawdopodobieństwami P D i P FA. Model systemu echolokacyjnego W radiolokacji stosowana jest algebraiczna forma równania zasięgu, a hydrolokacji – forma logarytmiczna wprowadzona przez R. Uricka.

173
SYSTEMY ECHOLOKACYJNE172 Logarytmiczna forma równania zasięgu Równanie wyjściowe I o - natężenie sygnału echa - fali padającej prostopadle na powierzchnię anteny odbiorczej I n – natężenie szumów na wejściu odbiornika w jego paśmie przenoszenia

174
SYSTEMY ECHOLOKACYJNE173 I 1 = 0.67 10 -18 W/m 2 Poziom echa Poziom szumów Próg detekcji EL-NL=DT Podstawowa forma logarytmiczna równania zasięgu Natężenie odniesienia odpowiadające ciśnieniu p=1 Pa w wodzie

175
SYSTEMY ECHOLOKACYJNE174 Definicje Poziomem echa EL nazywamy wyrażone w decybelach natężenie użytecznej fali płaskiej padającej prostopadle na powierzchnię przetwornika odbiorczego. Poziomem zakłóceń NL nazywamy wyrażone w decybelach równoważne natężenie płaskiej fali zakłóceń padającej prostopadle na powierzchnię przetwornika odbiorczego, która daje na wyjściu odbiornika taki sam poziom sygnału, jaki obserwuje się na jego wyjściu odbierając rzeczywiste zakłócenia akustyczne i elektryczne występujące w systemie. Progiem detekcji DT nazywamy wyrażony w decybelach stosunek natężeń płaskiej fali użytecznej i płaskiej fali zakłóceń padających prostopadle na powierzchnię przetwornika odbiorczego, który zapewnia na wyjściu odbiornika spełnienie założonych kryteriów detekcji.

176
SYSTEMY ECHOLOKACYJNE175 Wyznaczanie poziomu echa Logarytmujemy obustronnie powyższe równanie Jednostronne strat transmisyjne Siła celuPoziom źródła

177
SYSTEMY ECHOLOKACYJNE176 Poziomem źródła SL nazywamy, wyrażoną w decybelach, znormalizowaną wartość natężenia fali akustycznej w odległości jednego metra od powierzchni promieniującej przetwornika na jego osi akustycznej. Wyrażony w decybelach stosunek natężenia fali promieniowanej przez przetwornik nadawczy, występującego na jego osi akustycznej w odległości jednego metra od powierzchni przetwornika, do natężenia fali płaskiej padającej prostopadle na powierzchnię przetwornika odbiorczego nazywamy jednostronnymi stratami transmisyjnymi TL.

178
SYSTEMY ECHOLOKACYJNE177 Siłą celu nazywamy, wyrażony w decybelach, iloraz natężenia fali odbitej od celu w kierunku odbiornika w odległości 1 m od jego środka i natężenia płaskiej fali akustycznej padającej na cel z kierunku nadajnika. Równoważna definicja stosowana w radiolokacji - skuteczna powierzchnia rozproszenia Związek pomiędzy oboma definicjami Zakładamy, że zgodnie z prawem zachowania mocy P r =P i. Skuteczna powierzchnia rozproszenia ma takie pole, żeby powyższa równość zachodziła.

179
SYSTEMY ECHOLOKACYJNE178 Wzory na obliczanie parametrów równania zasięgu Poziom źródła nadajnika systemu hydrolokacyjnego pracującego w wodzie [dB] P t - moc elektryczna nadajnika, P 1 =1W - sprawność elektro-akustyczna anteny Di t – indeks kierunkowości anteny nadawczej Przykład: P t =1kW, =0.5, a=b=10 DI t= =10log(400 )=31 dB SL=171+30-3+31=229 dB
![SYSTEMY ECHOLOKACYJNE178 Wzory na obliczanie parametrów równania zasięgu Poziom źródła nadajnika systemu hydrolokacyjnego pracującego w wodzie [dB] P t - moc elektryczna nadajnika, P 1 =1W - sprawność elektro-akustyczna anteny Di t – indeks kierunkowości anteny nadawczej Przykład: P t =1kW, =0.5, a=b=10 DI t= =10log(400 )=31 dB SL= =229 dB](http://images.slideplayer.pl/33/10235262/slides/slide_179.jpg "SYSTEMY ECHOLOKACYJNE178 Wzory na obliczanie parametrów równania zasięgu Poziom źródła nadajnika systemu hydrolokacyjnego pracującego w wodzie [dB] P t - moc elektryczna nadajnika, P 1 =1W - sprawność elektro-akustyczna anteny Di t – indeks kierunkowości anteny nadawczej Przykład: P t =1kW, =0.5, a=b=10 DI t= =10log(400 )=31 dB SL= =229 dB")
180
SYSTEMY ECHOLOKACYJNE179 Straty transmisji TL Straty transmisji zależą od sposobu rozchodzenia się fali: fala płaska TL=0 + R[dB] fala cylindryczna TL=10logR/R 1 + R fala sferycznaTL=20logR/R 1 + R R – odległość celu od anteny, R 1 =1m - współczynnik tłumienia absorpcyjnego [dB/m] Przykład: R=1km, =0.01 dB/m, rozprzestrzenianie sferyczne TL=20log1000+0.01·1000=60+10=70 dB Tłumienie fali akustycznej zależy od składu chemicznego wody, częstotliwości, temperatury i innych czynników (patrz wcześniejszy wykład) Tłumienie fal e-m w radiolokacji jest na ogół bardzo małe i jest często pomijane. Dla fal o długości mniejszej od 1 cm tłumienie nie przekracza 0.01 dB/km. Dla fal krótszych bardzo szybko rośnie. Para wodna i deszcz zwiększają tłumienie w wąskim paśmie częstotliwości (dla długości fal około 1 cm).
![SYSTEMY ECHOLOKACYJNE179 Straty transmisji TL Straty transmisji zależą od sposobu rozchodzenia się fali: fala płaska TL=0 + R[dB] fala cylindryczna TL=10logR/R 1 + R fala sferycznaTL=20logR/R 1 + R R – odległość celu od anteny, R 1 =1m - współczynnik tłumienia absorpcyjnego [dB/m] Przykład: R=1km, =0.01 dB/m, rozprzestrzenianie sferyczne TL=20log ·1000=60+10=70 dB Tłumienie fali akustycznej zależy od składu chemicznego wody, częstotliwości, temperatury i innych czynników (patrz wcześniejszy wykład) Tłumienie fal e-m w radiolokacji jest na ogół bardzo małe i jest często pomijane.](http://images.slideplayer.pl/33/10235262/slides/slide_180.jpg "Dla fal o długości mniejszej od 1 cm tłumienie nie przekracza 0.01 dB/km. Dla fal krótszych bardzo szybko rośnie. Para wodna i deszcz zwiększają tłumienie w wąskim paśmie częstotliwości (dla długości fal około 1 cm)..")
181
SYSTEMY ECHOLOKACYJNE180 Siła celu Siła celu zależy od wielkości obiektu, jego kształtu, materiału, usytuowania względem kierunku padania i odbicia fali, własności rozpraszających itp.. Przykładowe wielkości siły celu w hydrolokacji: ryby L=30 cm, f=30 kHz, TS= - 35.1 dB (śledź) Okręty podwodne TS= 10 - 45 dB Okręty nawodne TS= 15 –25 dB MinyTS= 10 – 15 dB TorpedyTS= -20 dB (od dziobu) Kula doskonale odbijająca falę TS=10log[r(m)/2]
 Okręty podwodne TS= dB Okręty nawodne TS= 15 –25 dB MinyTS= 10 – 15 dB TorpedyTS= -20 dB (od dziobu) Kula doskonale odbijająca falę TS=10log[r(m)/2].")
182
SYSTEMY ECHOLOKACYJNE181 Poziom szumów NL=SPL+10log(B/B 1 )-DI o SPL – spektralny poziom szumów SPL=10log(I n1 /I 1 ) B – szerokość pasma [Hz], B 1 =1 Hz DI o – indeks kierunkowości anteny odbiorczej Próg detekcji NL=10log(SNR o )=10logd SNR o – stosunek sygnału do szumu na wejściu odbiornika zapewniający spełnienie warunków detekcji na wyjściu odbiornika. Wyznacza się go z krzywych operacyjnych danego typu detektora uwzględniając wpływ odbiornika na ewentualną redukcję szumów. Spektralny poziom szumów morza
![SYSTEMY ECHOLOKACYJNE181 Poziom szumów NL=SPL+10log(B/B 1 )-DI o SPL – spektralny poziom szumów SPL=10log(I n1 /I 1 ) B – szerokość pasma [Hz], B 1 =1 Hz DI o – indeks kierunkowości anteny odbiorczej Próg detekcji NL=10log(SNR o )=10logd SNR o – stosunek sygnału do szumu na wejściu odbiornika zapewniający spełnienie warunków detekcji na wyjściu odbiornika.](http://images.slideplayer.pl/33/10235262/slides/slide_182.jpg "Wyznacza się go z krzywych operacyjnych danego typu detektora uwzględniając wpływ odbiornika na ewentualną redukcję szumów. Spektralny poziom szumów morza.")
183
SYSTEMY ECHOLOKACYJNE182 Poziom sygnału na wejściu odbiornika UL=EL+VR UL=20log(U/U 1 ) U 1 =1V poziom sygnału na wejściu odbiornika VR=20log(S) S – odpowiedź napięciowa (czułość anteny) S=(U/U 1 )/(p/p 1 ) p 1 =1 Pa U – napięcie na wejściu odbiornika [V] VR wyznacza się z reguły doświadczalnie. U p P – ciśnienie akustyczne fali płaskiej padającej prostopadle na antenę.
![SYSTEMY ECHOLOKACYJNE182 Poziom sygnału na wejściu odbiornika UL=EL+VR UL=20log(U/U 1 ) U 1 =1V poziom sygnału na wejściu odbiornika VR=20log(S) S – odpowiedź napięciowa (czułość anteny) S=(U/U 1 )/(p/p 1 ) p 1 =1 Pa U – napięcie na wejściu odbiornika [V] VR wyznacza się z reguły doświadczalnie.](http://images.slideplayer.pl/33/10235262/slides/slide_183.jpg "U p P – ciśnienie akustyczne fali płaskiej padającej prostopadle na antenę..")
184
SYSTEMY ECHOLOKACYJNE183 XL= SL-NL-DT Zasięg systemu w ośrodku bez tłumienia absorpcyjnego

185
SYSTEMY ECHOLOKACYJNE184 Zasięg systemu w ośrodku z tłumieniem absorpcyjnym

186
SYSTEMY ECHOLOKACYJNE185 Projekt prostej echosondy rybackiej Zadanie: Określić podstawowe parametry techniczne echosondy rybackiej o następujących parametrach eksploatacyjnych: zasięg R=200 m ryba o długości 30 cm rozdzielczość kątowa 9 0 x 9 0 rozdzielczość wgłębna R=75 cm prawdopodobieństwo detekcji P D =0.7 prawdopodobieństwo fałszywego alarmu: jeden fałszywy alarm na 0.1 h, stan morza ss=6 częstotliwość pracy f=50 kHz

187
SYSTEMY ECHOLOKACYJNE186 Obliczenia projektowe: Uwaga: W obliczeniach przyjmiemy standard p 1 =1Pa 1.Czas trwania impulsu sondującego: =2 R/c=2·0.75m/1500m/s=1.5m/1500/s=1ms 2. Szerokość pasma przenoszenia odbiornika: B=1/ =1/1ms=1kHz 3. Spektralny poziom szumów SPL=-64+19log6-17log50=-64+15-29=-78 dB 4. Indeks kierunkowości Wzór empiryczny

188
SYSTEMY ECHOLOKACYJNE187 5. Poziom szumów: NL=SPL+10logB-DI= - 78+30-27=-75 dB 6. Prawdopodobieństwo fałszywego alarmu: T t =2R/c=400/1500=0.27s – czas jednej transmisji T r =0.23 s – czas potrzebny na zanik ech z dalszej odległości. T=T t +T r =0.5 s czas 1 transmisji n =2 dwie transmisje na 1s Liczba transmisji, w których mamy 1 fałszywy alarm L=360*2=720 transmisji Prawdopodobieństwo FA na 1 transmisję P FA1 =1/720 Prawdopodobieństwo FA na czas trwania impulsu P FA =P FA1 /T t (1/720)(1ms/270ms)=5 10 -6 7. Wyjściowy stosunek sygnału do szumu d=25 (z krzywych ROC) 8. Próg detekcji: SNR x =SNR y =DT=10logd=10log25= 14 dB 9. Poziom echa: EL=NL+DT=-75+14= - 61 dB
(1ms/270ms)= Wyjściowy stosunek sygnału do szumu d=25 (z krzywych ROC) 8. Próg detekcji: SNR x =SNR y =DT=10logd=10log25= 14 dB 9. Poziom echa: EL=NL+DT=-75+14= - 61 dB.")
189
SYSTEMY ECHOLOKACYJNE188 VL= - 69 dB – wartość zmierzona przy kalibracji przetwornika piezoelektrycznego. 10. UL=EL+VL=-61-69 = -130 dB U=10 -130/20 =10 -6.5 =0.3 V Przy tak małym napięciu może dominować szum elektryczny! Sprawdzenie: R=1k - wartość zmierzona, T =283 0 K U n 2 =4kTRB=4 1.38 10 -23 283 10 3 10 3 =1600 10 -17 =1.6 10 -14 U n =0.13 V, UL n =20log(0.1310 -6 )=-17-120=-137 dB EL n =Ul n -VL+DT=-137+69+14=-54 dB Wniosek: dominują szumy elektryczne Licząc się z ewentualnymi innymi zakłóceniami podwyższamy minimalne napięcie U=3 V, czyli o 20 dB
= =-137 dB EL n =Ul n -VL+DT= =-54 dB Wniosek: dominują szumy elektryczne Licząc się z ewentualnymi innymi zakłóceniami podwyższamy minimalne napięcie U=3 V, czyli o 20 dB.")
190
SYSTEMY ECHOLOKACYJNE189 11. Siła celu TS=19.1log30-0.9log50-62=28.2-1.5-62=-35 dB 12. Straty transmisyjne – propagacja sferyczna - tłumienie absorpcyjne =10dB/km 2TL=40logR+2 R=40log200+2 10 0.2=92+4=96 dB EL=-61dB+20 dB= - 41 dB, co odpowiada wzrostowi DT do 34dB w stosunku do szumów akustycznych

191
SYSTEMY ECHOLOKACYJNE190 13. Poziom źródła EL=SL-2TL+TS SL=EL+2TL-TS=-41+96+35=90 dB 14. Moc elektryczna nadajnika SL=51+10logP+10log +DI 10logP=SL-10log -DI-51=90+3-27-51=15 dB P=10 15/10 =10 1.5 =30W 14. Projekt anteny =c/f=1500[m/s]/50000[1/s]=0.03 m =3 cm l x =5.6·3cm=16.8 cm

192
SYSTEMY ECHOLOKACYJNE191 30 170 5

193
SYSTEMY ECHOLOKACYJNE192

194
SYSTEMY ECHOLOKACYJNE193 Parametry techniczne echosondy Częstotliwość pracy50 kHz Moc nadajnika30W Poziom źródła90 dB Czas trwania impulsu sondującego1 ms Minimalne napięcie sygnału echa 3 V Maksymalne napięcie szumów na wejściu odbiornika 0.6 V Szerokość pasma odbiornika 1kHz Szerokość wiązki 9 0 x 9 0

195
Specjalne systemy echolokacyjne SYSTEMY ECHOLOKACYJNE194 Ogniskowanie wiązki r(0) r(n) n d Opóźnienie Zależność kwadratowa!
 r(n) n d Opóźnienie Zależność kwadratowa!")
196
Beamformer kompensuje opóźnienia jedną z opisanych wyżej metod w dziedzinie czasu lub częstotliwości. Uwagi: Ogniskowanie jest skuteczne w polu bliskim. Ognisko można przesuwać dynamicznie w całym obszarze pola bliskiego. Ogniskowanie jest stosowane głównie w ultradźwiękowej diagnostyce medycznej. Rozkład pola przy ogniskowaniu wiązki Rozkład pola bez ogniskowania wiązki

197
Radar i sonar CW FM SYSTEMY ECHOLOKACYJNE196 Systemy echolokacyjne z falą ciągłą (CW) i modulacją częstotliwości (FM) stosuje się jako „ciche radary (sonary)” a bez modulacji FM oraz jako radary dopplerowskie do pomiaru prędkości poruszających się obiektów. Zasada pracy radaru CW FM Częstotliwość różnicowa F(t)=f(t)-f e (t)
=f(t)-f e (t).")
198
SYSTEMY ECHOLOKACYJNE197 Sygnał o częstotliwości różnicowej otrzymuje się na wyjściu mieszacza, mnożąc sygnał nadany z sygnałem echa. Wartości częstotliwości różnicowej wyznacza się dokonując transformacji Fouriera sygnału różnicowego. Widmo sygnału różnicowego sonary CW FM Odległość celu oblicza się zmieniając skalę widma (tylko do połowy częstotli- wości maksymalnej).
..")
199
SYSTEMY ECHOLOKACYJNE198 Ruch celu powoduje zmianę częstotliwości sygnału echa spowodowaną efektem Dopplera o: W wyniku zmienia się częstotliwość różnicowa: Powoduje to błąd oceny odległości celu Ponadto zmniejsza się wysokość prążka widma, co utrudnia detekcję.

200
SYSTEMY ECHOLOKACYJNE199 W radarach CW FM błąd oceny odległości jest niewielki ze względu na mały stosunek v/c. Przykład: f 0 /B 200, zasięg R z =30 km R=v/25. (R[m], v[m/s]). Prędkość celu v= 250 m/s (900 km/h) – samolot Błąd oceny odległości R=10 m – pomijalny. W sonarach błąd oceny odległości jest znacznie większy, co utrudnia korzystanie z tego typu systemów. Przyczyną jest mała prędkość propagacji fali akustycznej (200 000 razy mniejsza od prędkości fali elektromagnetycznej). Przykład: f 0 /B 20, zasięg R z =3 km Prędkość celu v= 5 m/s (18 km/h) – okręt 10 m Błąd oceny odległości R=1200 m – nieakceptowalny.
. Prędkość celu v= 250 m/s (900 km/h) – samolot Błąd oceny odległości R=10 m – pomijalny. W sonarach błąd oceny odległości jest znacznie większy, co utrudnia korzystanie z tego typu systemów. Przyczyną jest mała prędkość propagacji fali akustycznej ( razy mniejsza od prędkości fali elektromagnetycznej). Przykład: f 0 /B 20, zasięg R z =3 km Prędkość celu v= 5 m/s (18 km/h) – okręt 10 m Błąd oceny odległości R=1200 m – nieakceptowalny..")
201
SYSTEMY ECHOLOKACYJNE200 Dlaczego radar CW FM może być „cichy”, czyli trudniej wykrywalny przez obce odbiorniki prowadzące nasłuch sygnałów radarowych? 1) Odbiornik radaru CW FM realizuje filtrację dopasowaną (tu transformację Fouriera. Stosunek sygnału do szumu jest zatem proporcjonalny do energii emitowanego sygnału. W radarach CW FM wydłuża się czas trwania sygnału i proporcjonalnie zmniejsza jego moc, zachowując energię wystarczającą do wykrycie celu. Odbiornik przeciwnika nie jest dopasowany do sygnału naszego radaru (nie zna go!). Stosunek sygnału do szumu w takim od odbiorniku jest proporcjonalny do mocy sygnału odbieranego, a ta jest bardzo mała. Detekcja jest zatem trudniejsza lub niemożliwa. 2) Widmo sygnały radaru CW FM jest szerokie, co utrudnia detekcję metodą analizy widmowej. 3). Sygnał jest radaru CW FM jest ciągły, co utrudnia obserwację wzrostu chwilowej mocy odbieranego sygnału (szumu), co jest możliwe w typowym radarze impulsowym. Ciche radary morskie są produkowane w Polsce przez Przemysłowy Instytut Telekomunikacji.
 Odbiornik radaru CW FM realizuje filtrację dopasowaną (tu transformację Fouriera. Stosunek sygnału do szumu jest zatem proporcjonalny do energii emitowanego sygnału. W radarach CW FM wydłuża się czas trwania sygnału i proporcjonalnie zmniejsza jego moc, zachowując energię wystarczającą do wykrycie celu. Odbiornik przeciwnika nie jest dopasowany do sygnału naszego radaru (nie zna go!). Stosunek sygnału do szumu w takim od odbiorniku jest proporcjonalny do mocy sygnału odbieranego, a ta jest bardzo mała. Detekcja jest zatem trudniejsza lub niemożliwa. 2) Widmo sygnały radaru CW FM jest szerokie, co utrudnia detekcję metodą analizy widmowej. 3). Sygnał jest radaru CW FM jest ciągły, co utrudnia obserwację wzrostu chwilowej mocy odbieranego sygnału (szumu), co jest możliwe w typowym radarze impulsowym. Ciche radary morskie są produkowane w Polsce przez Przemysłowy Instytut Telekomunikacji..")
202
SYSTEMY ECHOLOKACYJNE201 Radar CRM 203 – moc 1mW- 2 W, szerokość wiązki 0.7deg zasięg do 48 Mm

203
SYSTEMY ECHOLOKACYJNE202 Radary dopplerowskie Są to specjalne radary, w których wykorzystuje się efekt Dopplera do pomiaru prędkości obserwowanych obiektów. Wykonywane są jako: impulsowe (CP) – umożliwiają pomiar prędkości i położenia celu z falą ciągłą (CW) - pomiar wyłącznie prędkości i kierunku z modulacją częstotliwości – pomiar prędkości i położenia celu Radar policyjny
 – umożliwiają pomiar prędkości i położenia celu z falą ciągłą (CW) - pomiar wyłącznie prędkości i kierunku z modulacją częstotliwości – pomiar prędkości i położenia celu Radar policyjny.")
204
SYSTEMY ECHOLOKACYJNE203 Radar meteorologiczny

205
Radar i sonar z syntetyczną aperturą SYSTEMY ECHOLOKACYJNE204 Radary (SAR) i sonary (SAS) z syntetyczną aperturą stosowane są w celu zwiększenia rozdzielczości poprzecznej, która w zwykłych radarach zależy od szerokości wiązki i pogarsza się z odległością celu od sonaru. Ogólna zasad pracy radaru SAR i sonaru SAS polega na odbiorze, rejestracji i przetwarzaniu sygnałów echa przez małą antenę o szerokiej wiązce w kolejnych punktach drogi pokonywa- nej przez antenę zainstalowaną na poruszającym się po linii prostej samolocie(pojeździe podwodnym, satelicie). W ten sposób antena ulega pozornemu wydłużeniu, co zmniejsza szerokość wiązki, a tym samym poprawia rozdzielczość poprzeczną (na rysunku azymutalną).
. W ten sposób antena ulega pozornemu wydłużeniu, co zmniejsza szerokość wiązki, a tym samym poprawia rozdzielczość poprzeczną (na rysunku azymutalną)..")
206
SYSTEMY ECHOLOKACYJNE205 Ilustracja zasady pracy Długość syntetycznej apertury v x y Impuls sondujący Dane – zarejestrowane sygnału Powierzchnia niejednoznaczności położenia celu Położenie celu po kompresji Po kompresji azymutalnej Po kompresji odległości owej

207
SYSTEMY ECHOLOKACYJNE206 Można wykazać, że faza odbieranych sygnałów zmienia się kwadratowo wzdłuż drogi pokonywanej przez antenę. Częstotliwość zmienia się więc liniowo i otrzymujemy sygnał z liniową modulacją częstotliwości. Zastosowanie filtracji dopasowanej powoduje, że na wyjściu filtru otrzymujemy bardzo krótkie impulsy pochodzące od punktowego celu, analogicznie jak w przypadku odbioru zwykłych sygnałów typu „chirp”. (Sygnały takie są stosowane w omawianych systemach w celu poprawy rozdzielczość wgłębnej i są przetwarzane w zwykły sposób). Rozdzielczość azymutalna systemu: R – odległość, L – długość anteny pozornej (syntetycznej apertury) Długość syntetycznej apertury zależy od szerokości wiązki: D – długość rzeczywistej anteny Rozdzielczość nie zależy od odległości i jest tym lepsza im krótsza jest antena
. Rozdzielczość azymutalna systemu: R – odległość, L – długość anteny pozornej (syntetycznej apertury) Długość syntetycznej apertury zależy od szerokości wiązki: D – długość rzeczywistej anteny Rozdzielczość nie zależy od odległości i jest tym lepsza im krótsza jest antena.")
208
SYSTEMY ECHOLOKACYJNE207 Rozdzielczość poprzeczna radaru SAR osiąga 10 cm, a eksperymentalnych radarów szerokopasmowych około 1 mm. Radar satelity Terra SAR ma rozdzielczość: 1 m w polu 5 km x 10 km 3 m w polu 30 km x 50 km Pracuje na częstotliwości 9.65 GHz (pasmo x długość fali ok. 3 cm) Orbita 514 km Obraz Pentagonu otrzymany z radaru SAR Trudności: dokładność toru lotu ok. 0.1 wielka złożoność obliczeniowa przetwarzania sygnałów (dwuwymiarowe przekształcenie Fouriera itp. – nie tak dawno realizowane optycznie).
 Orbita 514 km Obraz Pentagonu otrzymany z radaru SAR Trudności: dokładność toru lotu ok. 0.1 wielka złożoność obliczeniowa przetwarzania sygnałów (dwuwymiarowe przekształcenie Fouriera itp. – nie tak dawno realizowane optycznie)..")
209
SYSTEMY ECHOLOKACYJNE208 Sygnał sondujący z liniową modulacją częstotliwości Kompresja odległościowa –po czasie Czas trwania impulsu y(t,x) T=1/B B=15 kHz Rozdzielczość odległościowa dr=5 cm Kompresja azymutalna – po drodze x Częstotliwość sygnału y(t,x) zmienia się w liniowo w wyniku efektu Dopplera. Czym dłuższa droga tym szersze pasmo i lepsza rozdzielczość. Rozdzielczość azymutalna=długość anteny/2

210
Sonar boczny SYSTEMY ECHOLOKACYJNE209 Sposób przeszukiwania Pływak z sonarem bocznym

211
Echosonda wielowiązkowa SYSTEMY ECHOLOKACYJNE210 Wiele wąskich wiązek w przekroju poprzecznym do ruchu statku (pływaka) Obraz dna z wrakiem z echosondy wielowiązkowej
 Obraz dna z wrakiem z echosondy wielowiązkowej")
212
Sonar pasywny z anteną holowaną SYSTEMY ECHOLOKACYJNE211 Sonar dokonuje detekcji sygnałów akustycznych emitowanych przez okręty, wyznacza ich widmo i określa kierunek źródła fali metodą beamformingu. Schemat anteny holowanej Okręt podwodny z sonarem z anteną holowaną (Lockheed Martin)
.")
213
SYSTEMY ECHOLOKACYJNE212 Konsola sonaru SQR-19 z anteną holowaną (Katedra Systemów Elektroniki Morskiej) Antena na hali produkcyjnej
 Antena na hali produkcyjnej")
214
System pław radiohydroakustycznych SYSTEMY ECHOLOKACYJNE213 Z samolotu, śmigłowca wyrzucane są pławy odbierające sygnały akustyczne emitowane przez okręty podwodne. Sygnały są przekazywane radiowo do samolotu. Pławy firmy ULTRA

215
SYSTEMY ECHOLOKACYJNE214 S2(f) s0 S1(f)=A(f)cos S2(f)=A(f)sin FFT S1(f) Zasada pracy pławy kierunkowej Z proporcji prążków widma odczytujemy namiar .
 s0 S1(f)=A(f)cos S2(f)=A(f)sin FFT S1(f) Zasada pracy pławy kierunkowej Z proporcji prążków widma odczytujemy namiar .")
216
SYSTEMY ECHOLOKACYJNE215 Zobrazowanie systemu pław HYD 10 (Katedra Systemów Elektroniki Morskiej)
")
217
SYSTEMY ECHOLOKACYJNE216 KONIEC DZIĘKUJĘ ZA UWAGĘ

Podobne prezentacje

 ogół rzeczywistych jednostek, o których chcemy uzyskać informacje.>")
 rodzaj pracy,>")
>")

 1. Energia mechaniczna 2. Praca 3.>")







 (1623-1662) Blaise Pascal Ciśnienie wywierane na ciecz rozchodzi się jednakowo we wszystkich.>")




 przemiany.>")
