MECHANIKA NIEBA WYKŁAD 7 16.04.2008 r
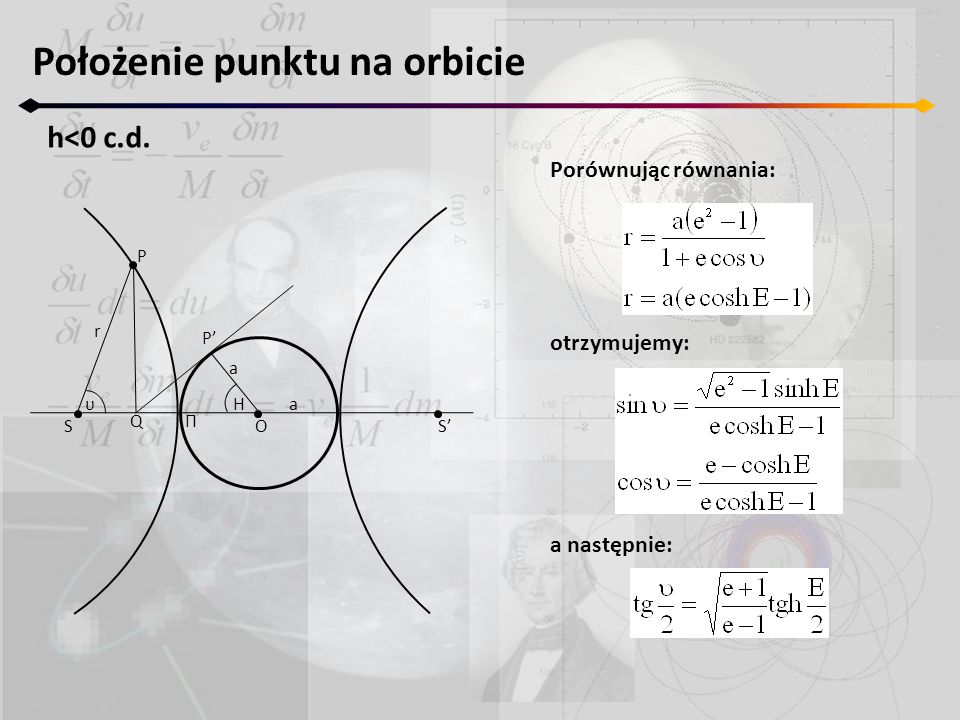
Położenie punktu na orbicie h<0 c.d. S’ S a P P’ r O Π Q υ H Porównując równania: otrzymujemy: a następnie:
Położenie punktu na orbicie h<0 Uzyskane równania można wyrazić za pomocą funkcji trygonometrycznych wprowadzając nową zmienną H: wtedy: Z definicji funkcji hiperbolicznych: można pokazać, że: S’ S a P P’ r O Π Q υ H
Położenie punktu na orbicie h<0 S’ S a P P’ r O Π Q υ H Wobec tego równanie: można zapisać jako: Oprócz tego:
Położenie punktu na orbicie h<0 S’ S a P P’ r O Π Q υ H Ten zestaw równań pozwala wyznaczyć położenie i prędkość ciała w ruchu po hiperboli.
Zagadnienie dwóch ciał Współrzędne barycentryczne Równanie: jest nazywane całką momentu pędu. Jednak należy pamiętać, że jest to moment liczony na jednostkę masy m2 i nie jest odzwierciedleniem całkowitego momentu pędu układu dwóch ciał. Rozpatrzymy teraz zagadnienie dwóch ciał używając układu współrzędnych mających początek w środku masy ciał z y x m1(x1,y1,z1) O’ m2(x2,y2,z2) O
Zagadnienie dwóch ciał Współrzędne barycentryczne z y x Wektor R jest definiowany przez równanie: uwzględniając: otrzymujemy: m1(x1,y1,z1) O’ m2(x2,y2,z2) O
Zagadnienie dwóch ciał Współrzędne barycentryczne z y x stąd: a) R1 ma zawsze zwrot przeciwny do R2 b) środek masy leży zawsze na linii łączącej obie masy więc R1+R2=r, gdzie r jest separacją mas c) odległości mas od środka masy są związane zależnością: m1R1=m2R2 stąd otrzymujemy: m1(x1,y1,z1) O’ m2(x2,y2,z2) O
Zagadnienie dwóch ciał Współrzędne barycentryczne Wynika stąd, że niezależnie od tego jaką krzywą stożkową dostaliśmy stosując współrzędne względne, ciało wokół środka masy zakreśla taką samą krzywą przeskalowaną jedynie o pewien czynnik zależny od masy. O’ m1 m2 oś układu O’ m1 m2 oś układu
Zagadnienie dwóch ciał Współrzędne barycentryczne W ruchu względnym jedną ze stałych był całkowity moment pędu: ponieważ R1 i R2 są proporcjonalne do r więc możemy napisać: z y x m1(x1,y1,z1) O’ m2(x2,y2,z2) O
Zagadnienie dwóch ciał Współrzędne barycentryczne Całkowity moment pędu układu jest równy: stąd: czyli, jeżeli m2<<m1, cc2 to c jest w przybliżeniu równe momentowi pędu układu liczonego na jednostkę masy m2 z y x m1(x1,y1,z1) O’ m2(x2,y2,z2) O
Zagadnienie dwóch ciał Współrzędne barycentryczne Okres obiegu każdej z mas wokół środka masy jest taki sam = P. Jednocześnie jest on równy okresowi obiegu masy m2 wokół m1 Stąd ruchy średnie są także równe: n1 =n2=n ale wielkie półosie nie: uwzględniając: otrzymujemy: O’ m1 m2 oś układu
Zagadnienie dwóch ciał Współrzędne barycentryczne O’ m1 m2 oś układu co oznacza, że elipsy są różnej wielkości ale mają jednakowe mimośrody. Z rysunku można także zauważyć, że perycentra obu mas różnią się o π. Rozpatrzymy teraz całkowitą energię w układzie dwóch punktów obiegających wspólny środek masy.
Zagadnienie dwóch ciał Współrzędne barycentryczne Energia całkowita układu (E*) jest sumą energii kinetycznej (liczonej w inercjalnym układzie barycentrycznym) i potencjalnej: przechodząc do współrzędnych biegunowych: skąd dostajemy: O’ m1 m2 oś układu
Zagadnienie dwóch ciał Współrzędne barycentryczne Dla orbit eliptycznych mieliśmy h=-μ/2a, więc: poza tym przekształcając wyrażenie na E*: co oznacza, że dla m1<<m2, hE*/m2, stała h jest w przybliżeniu równa całkowitej energii układu liczonej na jednostkę masy m2. O’ m1 m2 oś układu
Orbita w przestrzeni Elementy orbitalne a – wielka półoś e – mimośród Ω I ω ognisko orbita płaszczyzna odniesienia perycentrum kierunek węzeł wstępujący Orbita w przestrzeni Elementy orbitalne a – wielka półoś e – mimośród Ω – długość węzła wstępującego I – nachylenie orbity do płaszczyzny odniesienia ω – długość perycentrum w orbicie T – czas przejścia przez perycentrum = Ω+ω – długość perycentrum λ=M+ – długość średnia u=ω+υ – argument szerokości
Orbita w przestrzeni Elementy orbitalne Ω I ω ognisko orbita płaszczyzna odniesienia perycentrum kierunek węzeł wstępujący Orbita w przestrzeni Elementy orbitalne Przejście od układu współrzędnych związanego z orbitą do układu odniesienia polega na obrocie wokół trzech osi: obrót wokół osi z o kąt ω, wtedy oś x pokrywa się z linią węzłów obrót wokół osi x o kąt I, obie płaszczyzny pokrywają się obrót wokół osi z o kąt Ω
Orbita w przestrzeni Elementy orbitalne Każda z transformacji jest reprezentowana przez odpowiednią macierz obrotu: Wtedy przejścia między układami dokonuje się poprzez: Ponieważ wszystkie macierze obrotu są ortogonalne więc macierze odwrotne są po prostu macierzami transponowanymi
Orbita w przestrzeni Elementy orbitalne Jeżeli ograniczymy się do współrzędnych w leżących w płaszczyźnie orbity: Obrót nie zmienia długości stąd wielka półoś i mimośród nie zmieniają się
Orbita w przestrzeni Położenie planety z elementów orbitalnych Mając dane elementy orbitalne możemy wyznaczyć jej współrzędne w dowolnym układzie odniesienia. Przykład: wyznaczenie współrzędnych heliocentrycznych Jowisza na dzień 25 września 1993 r, 6:32 UT 1. Parametry orbity: parametr Epoka 2000.0 25.09.1993 r a [AU] 5.20336301 5.20332 e 0.04839266 0.0484007 I 1.̊30530 1.̊30537 Ω 100.̊55615 100.̊535 14.̊75385 14.̊7392 λ 34.̊40438 204.̊234 Murray, C.D. i Dermott, S.F. 1999, Solar System Dynamics, Cambridge University Press
Orbita w przestrzeni Położenie planety z elementów orbitalnych 3. Rozwiązując równanie Keplera dostajemy: E=189 .̊059 4. Korzystając ze wzorów: wyznaczamy współrzędne prostokątne Jowisza w płaszczyźnie jego orbity
Orbita w przestrzeni Położenie planety z elementów orbitalnych 5. Następnie używając wartości I, Ω, wyznaczamy macierz, która pozwoli na przejście do układu odniesienia (heliocentrycznego): skąd: X=-5.00336, Y=-2.16249, Z=0.121099
Orbita w przestrzeni Zmiany elementów orbitalnych Te przybliżone formuły pozwalają wyznaczyć perturbowane parametry orbitalne planet Układu Słonecznego z dokładnością rzędu 600’’ (w przedziale 1800 r. – 2050 r.) gdzie t jest czasem wyrażonym w stuleciach juliańskich począwszy od JD 2451545.0 (epoka 2000.0) stulecie juliańskie = 36525 dni Murray, C.D. i Dermott, S.F. 1999, Solar System Dynamics, Cambridge University Press
Orbita w przestrzeni Zmiany elementów orbitalnych a0 (AU) e0 I0 (o) Merkury 0.38709893 0.20563069 7.00487 77.45645 48.33167 252.25084 Wenus 0.72333199 0.00677323 3.39471 131.53298 76.68069 181.97973 Ziemia 1.00000011 0.01671022 0.00005 102.94719 348.73936 100.46435 Mars 1.52366231 0.09341233 1.85061 336.04084 49.57854 355.45332 Jowisz 5.20336301 0.04839266 1.30530 14.75385 100.55615 34.40438 Saturn 9.53707032 0.05415060 2.48446 92.43194 113.71504 49.94432 Uran 19.19126393 0.04716771 0.76986 170.96424 74.22988 313.23218 Neptun 30.06896348 0.00858587 1.76917 44.97135 131.72169 304.88003 Dane dla Ziemi są w rzeczywistości parametrami orbity barycentrum układu Ziemia-Księżyc Epoka 2000.0 (JD 2451545.0)
Orbita w przestrzeni Zmiany elementów orbitalnych Merkury Wenus Ziemia 66 2527 -23.51 573.57 -446.30 261628.29 415 Wenus 92 -4938 -2.86 -108.80 -996.89 712136.06 162 Ziemia -5 -3804 -46.94 1198.28 -18228.25 1293740.63 99 Mars -7221 11902 -25.47 1560.78 -1020.19 217103.78 53 Jowisz 60737 -12880 -4.15 839.93 1217.17 557078.35 8 Saturn -301530 -36762 6.11 -1948.89 -1591.05 513052.95 3 Uran 152025 -19150 -2.09 1312.56 1681.40 246547.79 1 Neptun -125196 2514 -3.64 -844.43 -151.25 786449.21 Zmiany wielkiej półosi i mimośrodu są pomnożone przez 108, podczas gdy zmiany wielkości kątowych zostały podane w sekundach łuku na stulecie Epoka 2000.0 (JD 2451545.0)
Orbita w przestrzeni Wyznaczanie elementów orbitalnych Algorytm pozwalający z położenia (X,Y,Z) i prędkości (X,Y,Z) wyznaczyć elementy orbitalne a, e, I, Ω, ν, T. Zakładamy, że masy ciała centralnego i orbitującego są równe odpowiednio m1 i m2. Mamy (w układzie odniesienia): Wtedy:
Orbita w przestrzeni Wyznaczanie elementów orbitalnych R – długość promienia wodzącego Ṙ – tempo zmian pr. wodzącego, znak Ṙ jest taki sam jak znak iloczynu ponieważ R jest zawsze dodatnie Potrzebne będą jeszcze rzuty momentu pędu: górny znak wybieramy jeśli cz>0, a dolny dla cz<0
Orbita w przestrzeni Wyznaczanie elementów orbitalnych Możemy teraz przystąpić do wyznaczenia parametrów orbity (eliptycznej): Wielką półoś wyznaczamy z równań: skąd dostajemy:
Orbita w przestrzeni Wyznaczanie elementów orbitalnych mimośród wyznaczamy przy wykorzystaniu uzyskanego wyrażenia na a oraz ze wzoru: otrzymujemy: Wyznaczamy nachylenie orbity, które jest kątem zawartym pomiędzy wektorem momentu pędu a jego składową hz:
Orbita w przestrzeni Wyznaczanie elementów orbitalnych 4. Do wyznaczenia długości węzła wstępującego, Ω używamy: skąd otrzymujemy: znak wybieramy w zależności od znaku hz
Orbita w przestrzeni Wyznaczanie elementów orbitalnych 5. Argument szerokości ω+υ otrzymamy z wyrażeń na Z/R oraz X/R (pamiętając, że r=R): czyli:
Orbita w przestrzeni Wyznaczanie elementów orbitalnych 6. Następnie wyliczamy anomalię prawdziwą i długość perycentrum (w płaszczyźnie orbity) przy użyciu: wtedy:
Orbita w przestrzeni Wyznaczanie elementów orbitalnych Na koniec wyliczamy moment przejścia przez perycentrum, T. Aby tego dokonać wyznaczamy E ze wzoru: a następnie z równania Keplera i III prawa Keplera: otrzymujemy:
Orbita w przestrzeni Wyznaczanie elementów orbitalnych Powyższa procedura pozwala uzyskać elementy orbitalne w przypadku orbity eliptycznej. Ze względów praktycznych warto jeszcze pozbyć się z równań czynnika G(m1+m2) poprzez wybór innych jednostek. Można tego dokonać skalując niezależną zmienną t przez czynnik i wprowadzając nową zmienną czasową, τ taką, że: Można zauważyć, że taki sam skutek odniesie założenie μ=1 w równaniu: jeśli dodatkowo przyjmiemy za jednostkę długości wartość wielkiej półosi, to mamy układ dwóch ciał, w którym mamy jednostkowy ruch średni i okres orbitalny równy 2π jednostek czasowych.