Klasyfikacja systemów System ciągły System dyskretny Przykłady
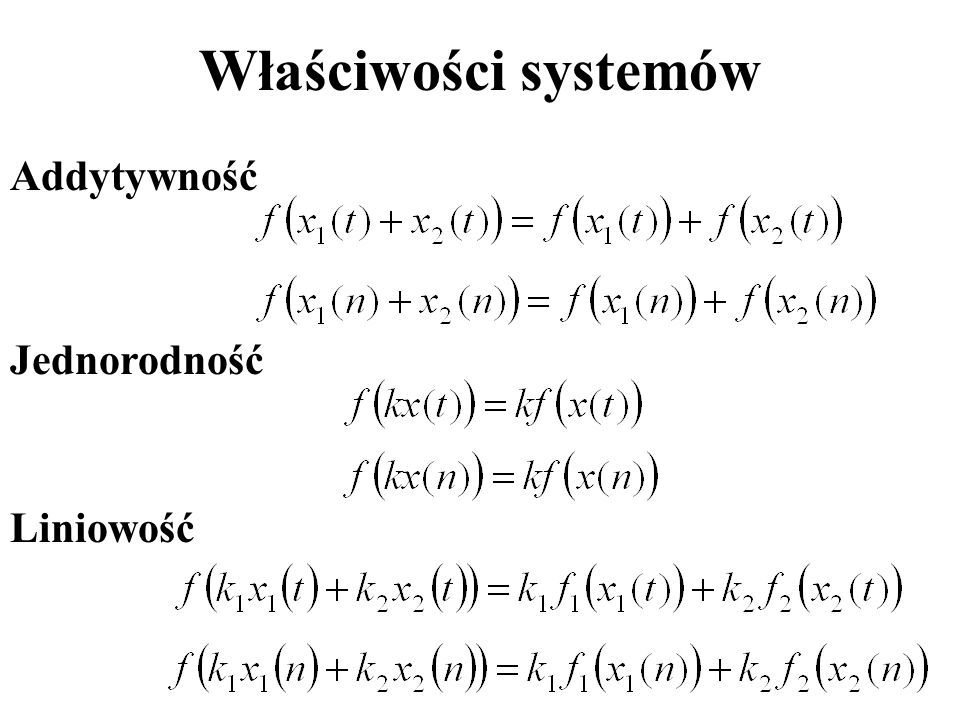
Właściwości systemów Addytywność Jednorodność Liniowość
Przykład 1 System jest liniowy
Przykład 2 System jest nieliniowy
Stacjonarność System ciągły System dyskretny dla wszystkich t i dowolnego h System dyskretny dla wszystkich n i dowolnego N
Przykład System jest niestacjonarny
y(n) zależy od x(n) wyłącznie dla tego samego n Bezinercyjność System ciągły y(t) w chwili t zależy od x(t) określonego wyłącznie w tej samej chwili t System dyskretny y(n) zależy od x(n) wyłącznie dla tego samego n Przykład System nie jest bezinercyjny, czyli jest inercyjny
Stabilność System ciągły dla wszystkich t dodatnie stałe System dyskretny dla wszystkich n dodatnie stałe
Odpowiedź ciągłego systemu LTI
(1.32) (1.33)
(1.34) (1.35)
Odpowiedź dyskretnego systemu LTI (1.38)
(1.39)
Splot ciągły (1.40) (1.41)
(1.42) (1.43)
Graficzna interpretacja splotu ciągłego Rys. 1.23 (1.44)
dla
Rys. 1.24 Rys. 1.25
Rys. 1.26 Rys. 1.27
Rys. 1.28 Rys. 1.29
Rys. 1.30 Rys. 1.31
Rys. 1.32 Rys. 1.33
t negative 1 2 3 4 5 greater than 5 f(t) 0.5 4.5 7.5 10.5 Rys. 1.34
Splot dyskretny (1.46)
(1.47)
Interpretacja graficzna splotu dyskretnego Rys. 1.37 (1.48)
Rys. 1.38 Rys. 1.39 Rys. 1.40
Rys. 1.41
Rys. 1.42
Rys. 1.43