Ruch układów złożonych środek masy bryła sztywna ruch obrotowy i toczenie
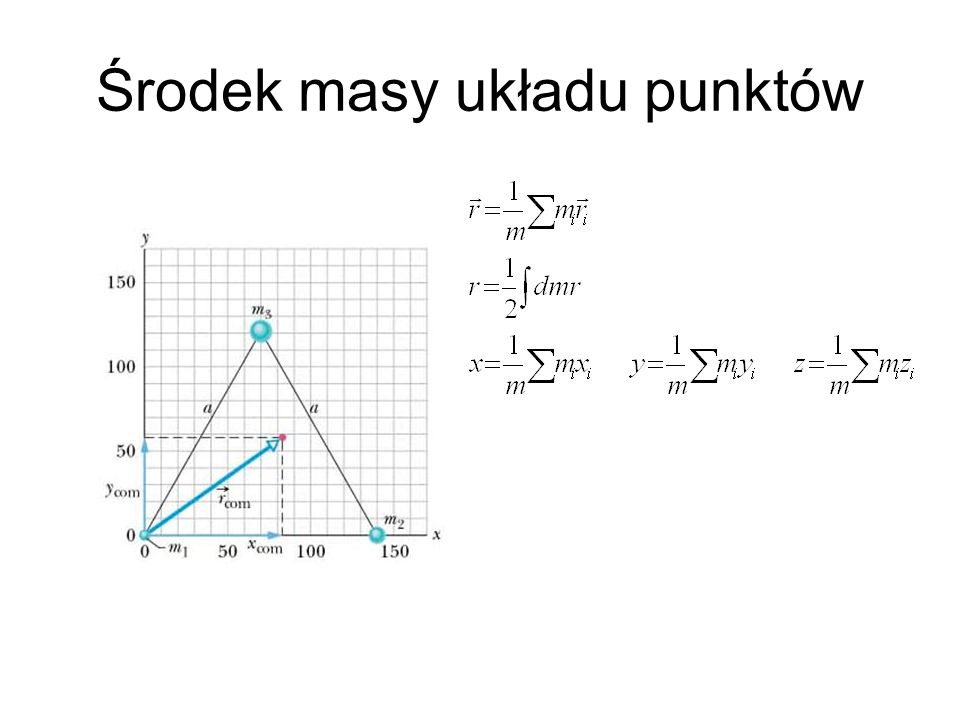
Środek masy układu punktów
Ruch środka masy ruch układu punktów może być zastąpiony przez ruch środka masy
Obroty oś obrotu, wektor prędkości kątowej ( ) wszystkie punkty poruszają się ze stałym prędkość liniowa jest zmnienna w ruchu przyspieszonym przyspieszenie liniowe (styczne)
Toczenie ciał s = R > V com(SM) = r Chwilowa Oś obrotu P obrót przesunięcie toczenie
Ruch postępowy+obrotowy A- zbiór punktów ciała sztywnego poruszających się ruchem postępowym środka masy z V SM i obrotowym ze stałym Dla brył o symetrii osiowej : I – moment bezwładności
Moment bezwładności
Moment pędu przeniesiona do O II zasada dynamiki Newtona
Moment siły II zasda dynamiki Newtona dla ruchu obrotowego kierunek : reguła śruby prawoskrętnej lub "trzech palców" prawej ręki.
Równania ruchu dla toczącego się ciała siła tarcia statycznego f s – brak poślizgu
Zachowanie momentu pędu "piruety" "Sruby"
Zachowanie momentu pędu (II) obrót statku kosmicznego
Precesja bąka Precejs koła wokól osi