Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Technologie map cyfrowych Wybrane formaty przechowywania danych przestrzennych

2
W czym jest problem Format musi uwzględniać specyfikę danych – Wektor, raster – odniesienie geograficzne – Sposób wyświetlania (np. generalizacja, labelling) Bounding box Atrybuty – Model danych przestrzennych – Rozmiar/jakość danych -> specyfikę – Hierarchiczne zbiory danych
 Bounding box Atrybuty – Model danych przestrzennych – Rozmiar/jakość danych -> specyfikę – Hierarchiczne zbiory danych.")
3
Sposoby przechowywania danych przestrzennych Pliki – Mnogość formatów, parsery, nie zawsze mogą oddać dobrze przyjęty model danych -> ich odczyt często wymaga wiedzy a priori odnośnie samego modelu, – Zbiory danych a metadane – Pozostają kwestie licencyjne Bazy danych – Drogie licencje, tworzenie bazy danych (relacji) jest skomplikowane, problemy w migracji (nie tylko fizycznej ale także technologicznej) – BLOB a zapytania przestrzenne Podejścia hybrydowe
 jest skomplikowane, problemy w migracji (nie tylko fizycznej ale także technologicznej) – BLOB a zapytania przestrzenne Podejścia hybrydowe")
4
Formaty plików Dane wektorowe - ShapeFile, CSV, DAT, DGN, KML, MapInfo, SVG, formaty Garmina i inne Dane rastrowe - standardowe formaty graficzne + world file, prj file -(Geo)Tiff -ECW -HDF -LST
Tiff -ECW -HDF -LST")
5
Bazy danych przestrzennych Oracle Spatial Database Microsoft SQL spatial databes PostGIS Inne modele podstawowych typów przestrzennych -> migracja pomiędzy bazami danych jest bardzo trudna -> konsekwencje - przywiązanie do technologii

6
PostGIS

7
Przykład: SQL Server spatial datatypes

8
Oracle Spatial Database

9
ShapeFile Stworzony przez firmę ESRI – standard otwarty Tylko do przechowywania danych wektorowych Brak opisu topologii – szybszy w odczycie, łatwy w edycji -> ubogi model danych Format składa się z czterech plików – Plik *.shp – Plik *.shx – *.dbf (dBase) – *. prj

10
Struktura pliku

11
Rekordy typu Point i MultiPoint

12
Rekord Polygon Na jeden rekord może składać się więcej niż jeden wielokąt (ring)(zamknięty) Ring oznacza sekwencję połączonych ze sobą 4 lub więcej punktów Kierunek kolejnych węzłów określa wnętrze poligonu W specyfikacji: wewnętrzna część wielokąta (ring) nazywana jest jako „part”
(zamknięty) Ring oznacza sekwencję połączonych ze sobą 4 lub więcej punktów Kierunek kolejnych węzłów określa wnętrze poligonu W specyfikacji: wewnętrzna część wielokąta (ring) nazywana jest jako „part")
13
Polygon cd.

14
Rekord PolyLine Opisuje łamaną w postaci ciągu (min. 2) punktów Jeden rekord może składać się z kilku łamanych, które mogą się ze sobą łączyć
 punktów Jeden rekord może składać się z kilku łamanych, które mogą się ze sobą łączyć.")
15
PolyLine cd.

16
Przykładowe rozszerzenia M- typy zawierający wartości pomierzone dla poszczególnych cech geograficznych Z-typy – zawierają informację o wysokości – używane sporadycznie Informacje te mogą być także (częściowo) przechowywane w postaci atrybutów przypisanych do cech geograficznych
 przechowywane w postaci atrybutów przypisanych do cech geograficznych")
17
Przykład M-typu

18
Rekord MultiPactch

19
MultiPatch

20
Plik indeksowy

21
Plik DBF Standard DBF Nazwa pliku tożsama z nazwą *.shp Tabela musi mieć relację 1 do 1 z tabelą cech w pliku SHP i zachowywać kolejność

22
Format LAS Laser (LiDAR) data Dedykowany do przechowywania chmury punktów Zawiera dane z GPS, IMU, LiDAR (X,Y,Z, intensity, RGB)
 data Dedykowany do przechowywania chmury punktów Zawiera dane z GPS, IMU, LiDAR (X,Y,Z, intensity, RGB)")
23
Skanowanie laserowe Ideą działania skaningu laserowego jest pomiar czasu między emisją, a odbiorem impulsu laserowego, pozwalający na wyznaczenie odległości od sensora, umieszczonego na pokładzie samolotu, do punktów powierzchni topograficznej. Obecnie systemy skanujące oprócz pierwszego i ostatniego odbicia, mają możliwość rejestracji wielu odbić impulsu laserowego (ang. full waveform). Odbicia pośrednie znajdują zastosowanie w przypadkach szczególnych, np. przy pomiarze linii energetycznych. Pozycja trajektorii lotu samolotu wyznaczana jest poprzez system pozycyjny GPS (ang. Global System Position) oraz inercjalny system nawigacyjny INS (ang. Inertial Navigation System), który mierzy przyspieszenie wzdłuż trzech osi i zmiany kątowych pochyleń platformy. Dzięki integracji informacji GPS oraz INS, systemów wzajemnie uzupełniających się, można określić pozycję samolotu z bardzo wysoką dokładnością, sięgającą 2cm, oraz kąty pochylenia sensora skanującego.
. Odbicia pośrednie znajdują zastosowanie w przypadkach szczególnych, np. przy pomiarze linii energetycznych. Pozycja trajektorii lotu samolotu wyznaczana jest poprzez system pozycyjny GPS (ang. Global System Position) oraz inercjalny system nawigacyjny INS (ang. Inertial Navigation System), który mierzy przyspieszenie wzdłuż trzech osi i zmiany kątowych pochyleń platformy. Dzięki integracji informacji GPS oraz INS, systemów wzajemnie uzupełniających się, można określić pozycję samolotu z bardzo wysoką dokładnością, sięgającą 2cm, oraz kąty pochylenia sensora skanującego..")
24
Źródło: www.progea.pl

25
Format LAS The format contains binary data consisting of a public header block, any number of (optional) Variable Length Records (VLRs), the Point Data Records, and any number of (optional) Extended Variable Length Records (EVLRs). Format little-endian format. The public header block contains generic data such as point numbers and point data bounds. We refer to the data content of the file as the “payload.” The Variable Length Records (VLRs) contain variable types of data including projection information, metadata, waveform packet information, and user application data. They are limited to a data payload of 65,535 bytes. The Extended Variable Length Records (EVRLs) allow a higher payload than VLRs and have the advantage that they can be appended to the end of a LAS file. This allows adding, for example, projection information to a LAS file without having to rewrite the entire file.
 contain variable types of data including projection information, metadata, waveform packet information, and user application data. They are limited to a data payload of 65,535 bytes. The Extended Variable Length Records (EVRLs) allow a higher payload than VLRs and have the advantage that they can be appended to the end of a LAS file. This allows adding, for example, projection information to a LAS file without having to rewrite the entire file..")
26
Public Header

27
Zapis punktów w LAS

28
Specyfikacja na dzień dzisiejszy (wersja 1.4 r12) definiuje 10 formatów punktów, różnią się zawartością Format 0 – standardowy Format 1 = Format 0 + dane GPS Format 2 = Format 0 + RGB Format 3 = Format 1 + RGB Format 4 = Format 1 + podst. info. przebiegu echa Formaty 5-10 – zawierają dokładniejsze info. o przebiegu echa

29
BTW LiDARy służą nie tylko do tworzenia cyfrowych map terenu, są także używane do: – Map geodezyjnych – Map powodziowych – Wizualizacji – Inspekcja konstrukcji budowlanych – Kryminalistyce – Badaniach w skali mikro – Architektonice – Turystyce i innych…

30
Podsumowanie Specyfika plików Mnogość urządzeń pomiarowych Integracja z modelem Konieczność post-processingu

31
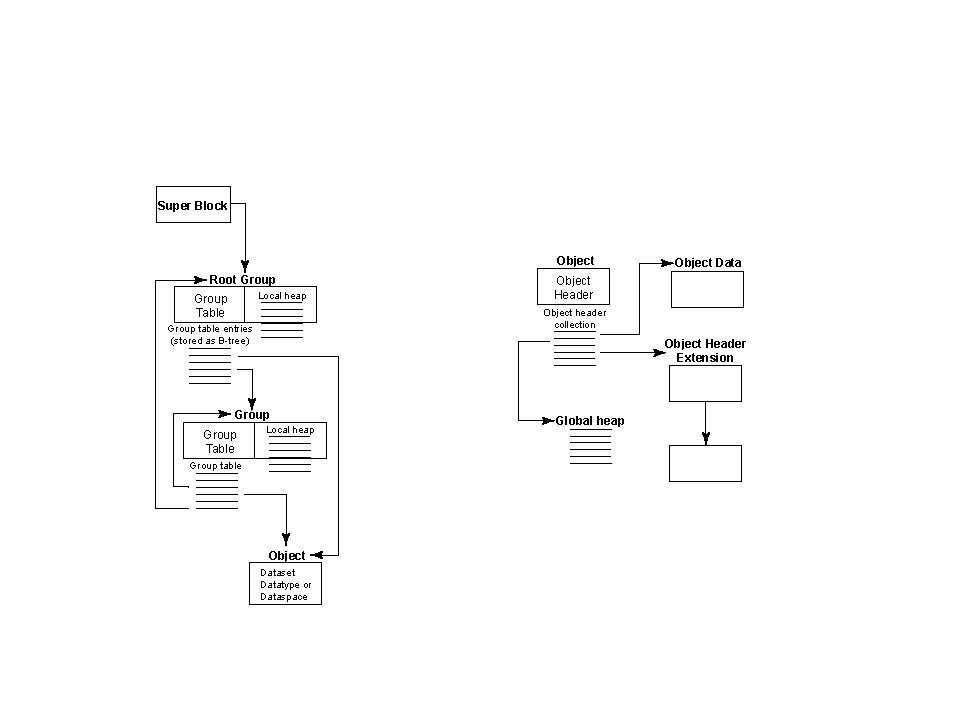
Format HDF Opisuje hierarchiczną strukturę plików (LoD) An HDF5 file appears to the user as a directed graph. The nodes of this graph are the higher-level HDF5 objects that are exposed by the HDF5 APIs: – Groups – Datasets – Named datatypes At the lowest level, as information is actually written to the disk, an HDF5 file is made up of the following objects: – A superblock – B-tree nodes – Heap blocks – Object headers – Object data – Free space The HDF5 library uses these low-level objects to represent the higher-level objects that are then presented to the user or to applications through the APIs. For instance, a group is an object header that contains a message that points to a local heap (for storing the links to objects in the group) and to a B-tree (which indexes the links). A dataset is an object header that contains messages that describe datatype, dataspace, layout, filters, external files, fill value, etc with the layout message pointing to either a raw data chunk or to a B-tree that points to raw data chunks.
 and to a B-tree (which indexes the links). A dataset is an object header that contains messages that describe datatype, dataspace, layout, filters, external files, fill value, etc with the layout message pointing to either a raw data chunk or to a B-tree that points to raw data chunks..")
33
B-drzewo (Disk Format: Level 1A - B- Trees and B-Tree Nodes ) Jest implementacją informatyczną mechanizmu LoD Version 1 B-trees in HDF5 files an implementation of the B- link tree, in which the sibling nodes at a particular level in the tree are stored in a doubly-linked list, The B-link trees implemented by the file format contain one more key than the number of children. In other words, each child pointer out of a B-tree node has a left key and a right key. The pointers out of internal nodes point to sub- trees while the pointers out of leaf nodes point to symbol nodes and raw data chunks. Aside from that difference, internal nodes and leaf nodes are identical.

34
HDF 4 poziomy danych – Disk level format 0 – metadane – Disk level format 1 – File infrastructure – Disk level format 0 – Data objects

35
Format 0 – patrz materiały do wykładu

36
Format 1 – opis pliku Patrz materiały do wykładu

Podobne prezentacje






klasyczne>")
 oznaczają stopień aproksymacji wielomianowej w kierunkach x i y nrdof = ilość stopni swobody na elemencie = (ph+1)* (pv+1) CAŁKOWANIE NA POJEDYNCZYM.>")











