Pobierz prezentację
1
Dynamika ruchu obrotowego
Moment siły W ruchu postępowym siłę wiążemy z liniowym przyspieszeniem ciała. Jaką wielkość będziemy wiązać z przyspieszeniem kątowym?

2
Nie może być to tylko siła, bo jak pokazuje doświadczenie, np
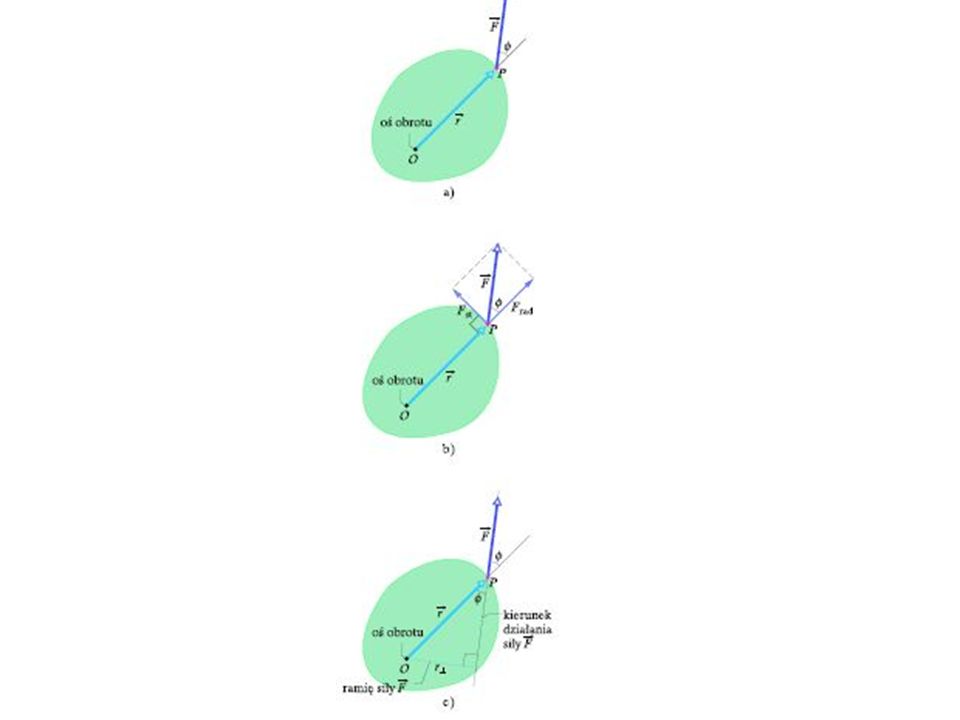
Nie może być to tylko siła, bo jak pokazuje doświadczenie, np. z otwieraniem drzwi, przyspieszenie kątowe zależy od tego, gdzie i pod jakim kątem jest przyłożona siła. W szczególności, siła przyłożona w miejscu zawiasów zarówno wzdłuż jak i prostopadle do nich nie wytwarza żadnego przyspieszenia. Natomiast siła przyłożona do drzwi na ich zewnętrznej krawędzi i pod kątem prostym nadaje im maksymalne przyspieszenie.

3
τ = r x F Dla ruchu obrotowego odpowiednikiem siły w ruchu postępowym
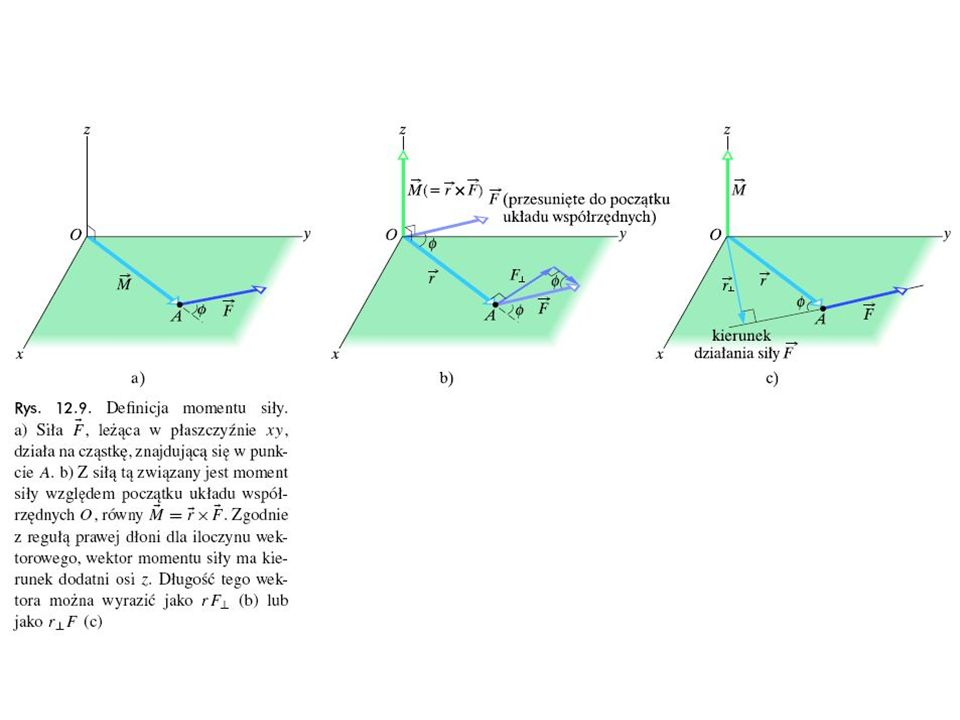
jest moment siły (tzw. moment obrotowy) M. Jeżeli siła F działa na cząstkę to moment siły jest definiowany jako: τ = r x F gdzie wektor r reprezentuje położenie cząstki względem wybranego Inercjalnego układu odniesienia. Moment siły jest wielkością wektorową, której wartość bezwzględna wynosi: M = rFsin (iloczyn wektorowy). Wielkość r nazywamy ramieniem siły (widać, że bierzemy albo r albo F).
 M. Jeżeli siła F działa na cząstkę to moment siły jest definiowany jako: τ = r x F. gdzie wektor r reprezentuje położenie cząstki względem wybranego. Inercjalnego układu odniesienia. Moment siły jest wielkością wektorową, której wartość bezwzględna wynosi: M = rFsin (iloczyn wektorowy). Wielkość r nazywamy ramieniem siły (widać, że bierzemy albo r albo F).")
6
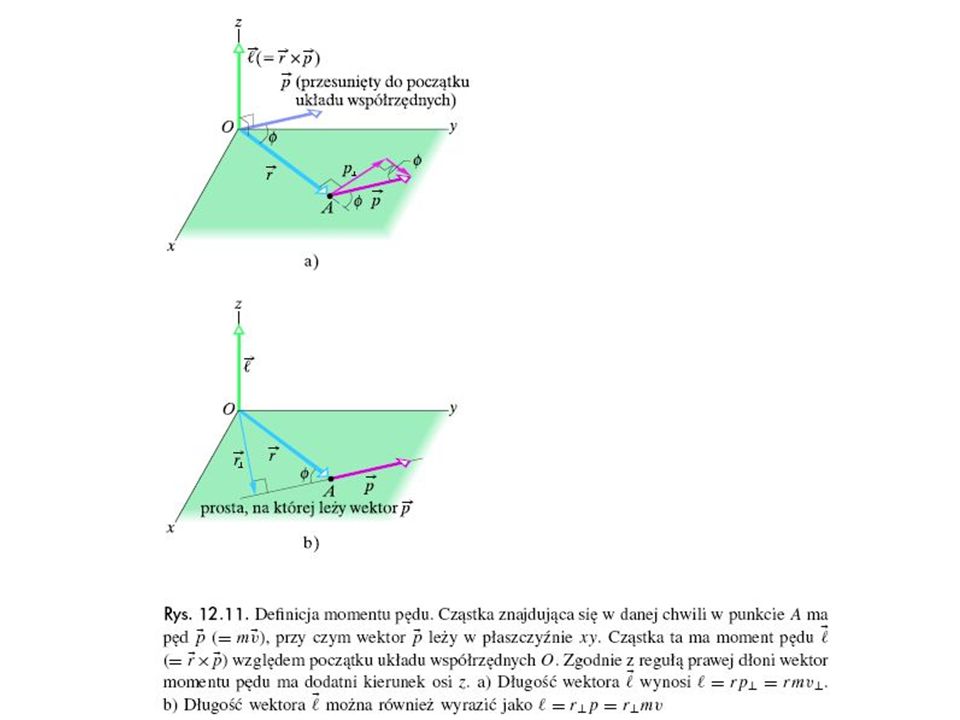
Moment pędu Zdefiniujmy wielkość, która w ruchu obrotowym odgrywa rolę analogiczną do pędu. Wielkość L będziemy nazywać momentem pędu i definiujemy ją: gdzie p jest pędem cząstki, a r reprezentuje położenie cząstki względem wybranego inercjalnego układu odniesienia. Wartość L wynosi rpsin i analogicznie do momentu siły wielkość r nazywamy ramieniem pędu.

8
Istnieje bezpośrednia zależność pomiędzy momentem siły i momentem pędu.
F = dp/dt (dla pojedynczej cząstki) Mnożąc wektorowo obie strony przez r otrzymujemy jest momentem siły , więc
 Mnożąc wektorowo obie strony przez r otrzymujemy. jest momentem siły , więc.")
9
L = rp różniczkujemy obustronnie względem czasu, otrzymując
moment pędu L = rp różniczkujemy obustronnie względem czasu, otrzymując ponieważ dr/dt = v, więc

10
wypadkowy moment siły działający na cząstkę
Wiemy, że = 0 (z definicji iloczynu wektorowego), więc wypadkowy moment siły działający na cząstkę jest równy prędkości zmian momentu pędu tej cząstki
, więc. wypadkowy moment siły działający na cząstkę. jest równy prędkości zmian momentu pędu tej cząstki.")
11
Zachowanie momentu pędu
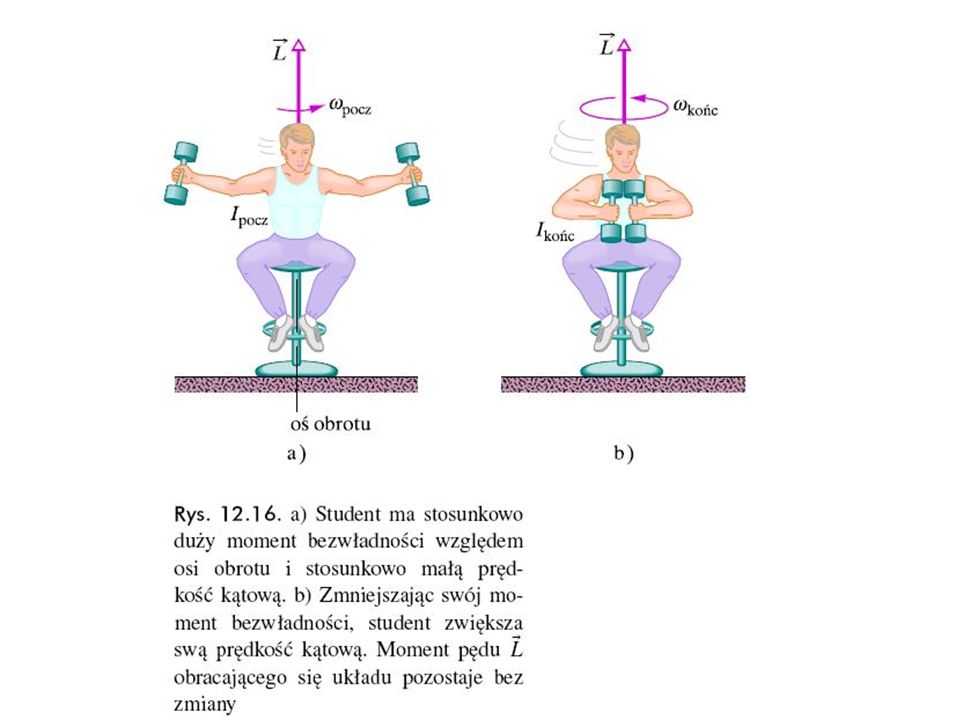
Dla układu n cząstek jeżeli na układ nie działa zewnętrzny moment siły (lub suma = 0) to moment pędu układu pozostaje stały
 to moment pędu układu pozostaje stały.")
14
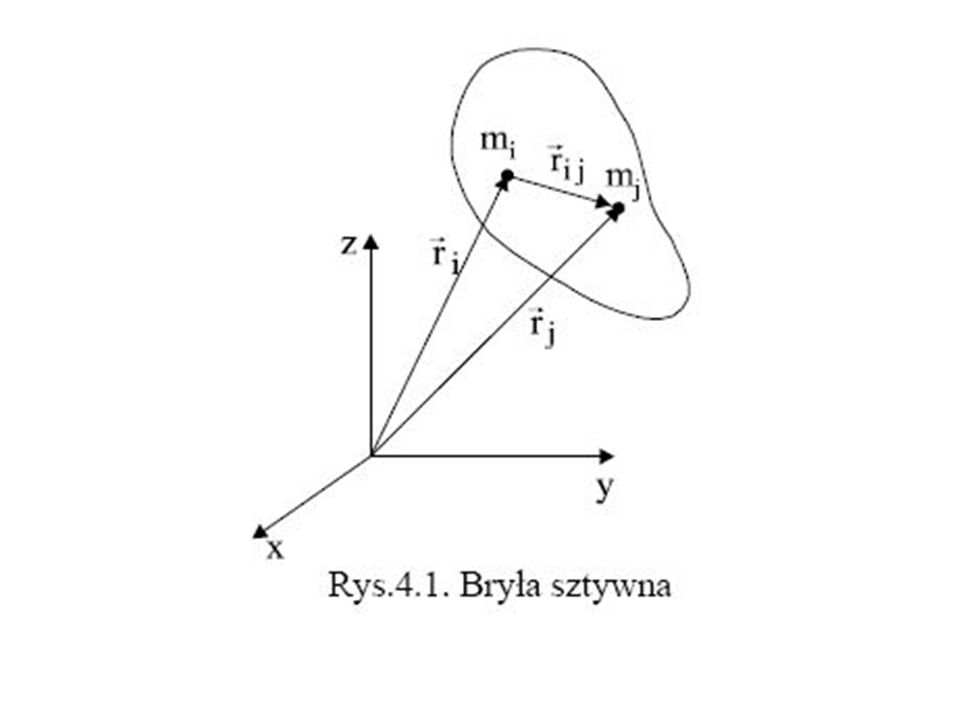
Ciała sztywne i moment bezwładności
Większość mas w przyrodzie to nie cząstki tylko rozciągłe ciała stałe, które mogą wykonywać zarówno ruch postępowy jak i obrotowy. Przez ciała stałe, sztywne, rozumiemy ciała, w których odległość między dwoma wybranymi elementami pozostaje stała.

15
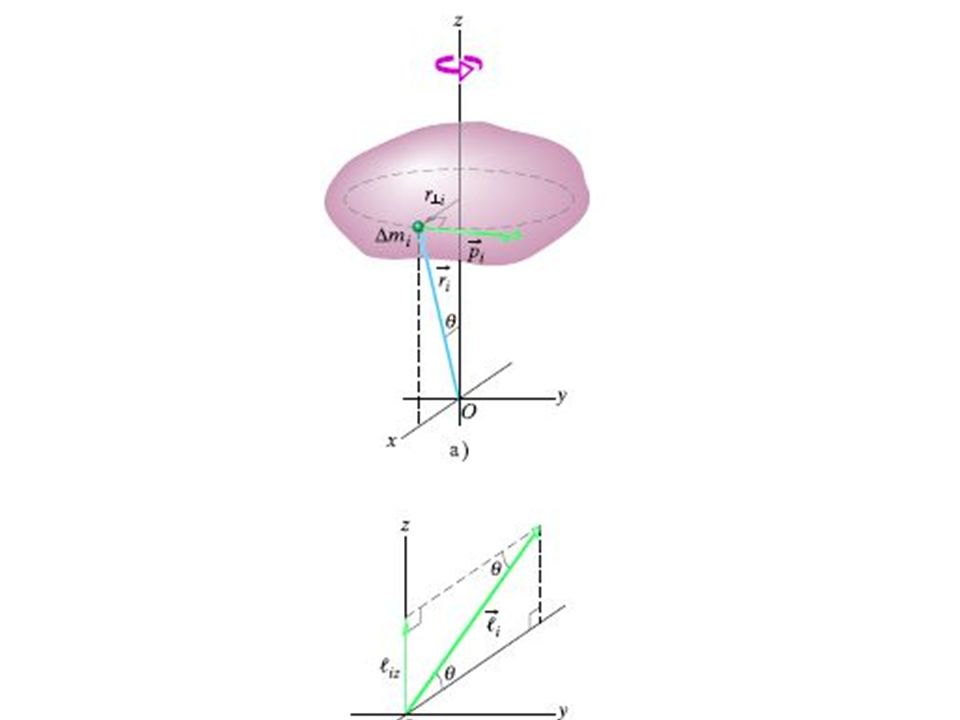
bryła obracająca się ze stałą prędkością kątową
wokół stałej osi w układzie środka masy

18
Różne części ciała mają różną prędkość liniową v chociaż tą samą kątową .
Dla potrzeb opisu ciało można podzielić na elementy o masie mi odległe od osi obrotu o ri. prędkość takiego elementu wynosi vi = ri . Wartość momentu pędu L tego ciała można obliczyć:

19
Wielkość w nawiasie nazywamy momentem bezwładności I, który definiujemy
jako: a dla ciągłego rozkładu masy mamy Zwróćmy uwagę, że I zależy od osi obrotu.

20
Często do obliczania momentu bezwładności wygodnie jest posłużyć się
twierdzeniem Steinera. Podaje ono zależność pomiędzy momentem bezwładności I ciała względem danej osi, a momentem bezwładności Iśr.m. tego ciała względem osi przechodzącej przez jego środek masy i równoległej do danej gdzie m jest masą ciała, a h odległością pomiędzy osiami.

23
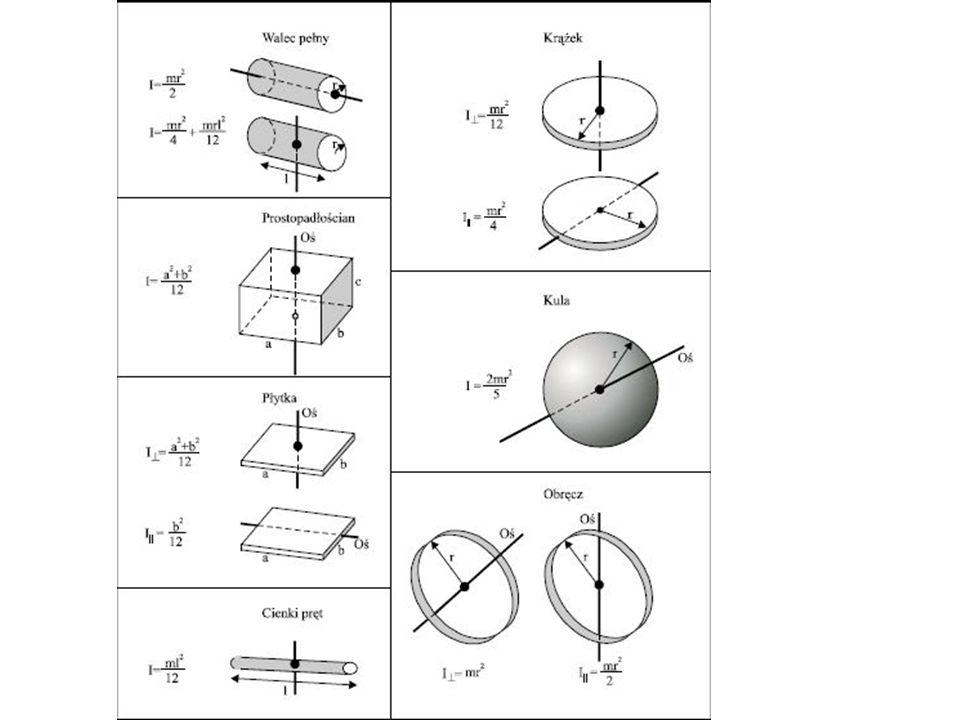
Ciało I Obręcz, pierścień względem osi przez środek Krążek, walec względem osi przez środek Pręt wokół osi przez środek Pręt wokół osi przez koniec Pełna kula wokół osi przez środek Czasza kulista wokół osi przez środek mR2 mR2/2 ml2/12 ml2/3 2mR2/ 5 2mR2/3

24
a ponieważ M = dL/dt, więc
moment pędu L = I a ponieważ M = dL/dt, więc

25
Energia kinetyczna w układzie środka masy
więc

26
p = mv F = ma Ek = (1/2) mv2 L= I = I Ek = (1/2)I2 Ruch postępowy
Ruch obrotowy p = mv F = ma Ek = (1/2) mv2 L= I = I Ek = (1/2)I2 Moment bezwładności I jest analogiczną wielkością do masy m w ruchu postępowym. Chociaż masa ciała nie zależy od jego położenia, to moment bezwładności zależy od osi, wokół której obraca się ciało.
 mv2. L= I = I Ek = (1/2)I2. Moment bezwładności I jest analogiczną wielkością do masy m w ruchu. postępowym. Chociaż masa ciała nie zależy od jego położenia, to moment. bezwładności zależy od osi, wokół której obraca się ciało.")
27
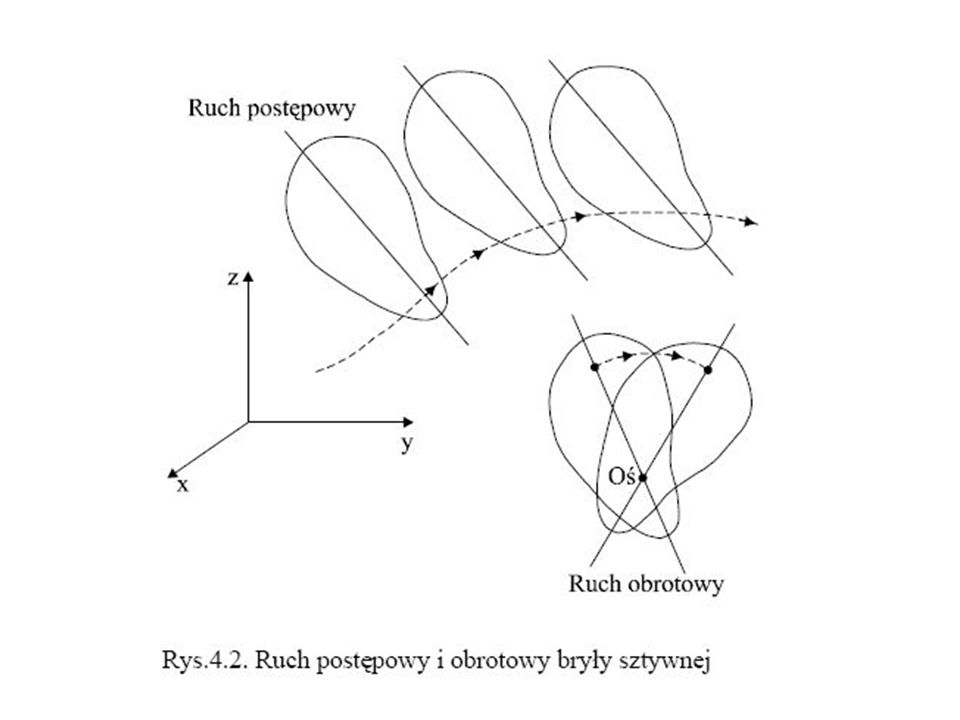
Ruch postępowo-obrotowy ciała sztywnego
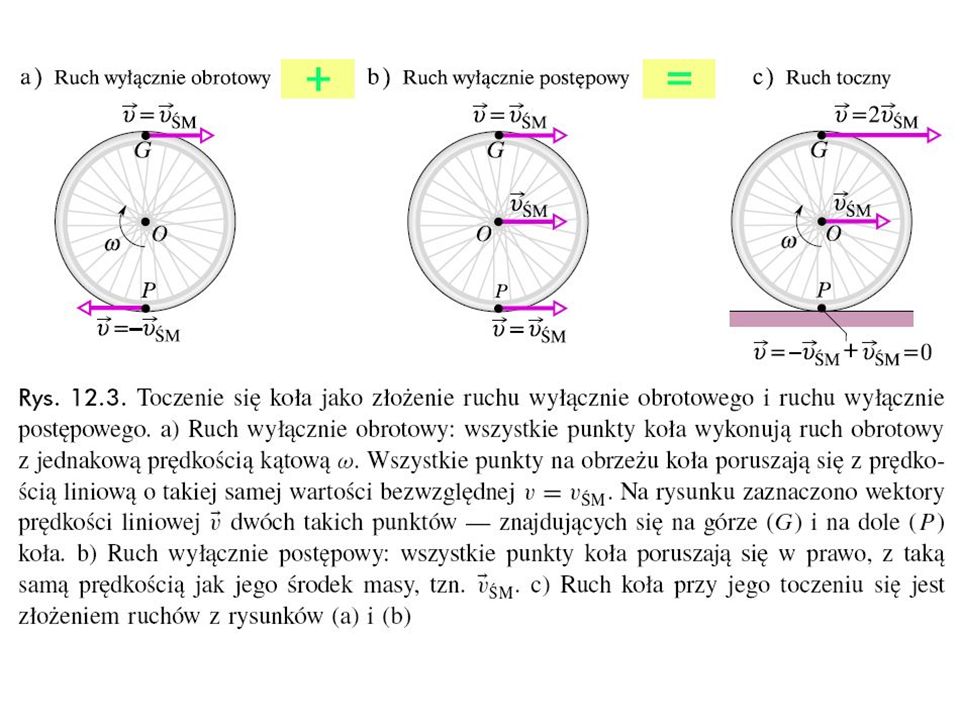
Gdy ciało się toczy, to wykonuje zarówno ruch postępowy, jak i obrotowy. Dlatego np. toczenie można traktować jako złożenie ruchu postępowego i obrotowego

29
W ruchu postępowym, rysunek (a), wszystkie punkty poruszają się
z takimi samymi prędkościami. W ruchu obrotowym, rysunek (b), przeciwległe punkty poruszają się z przeciwnymi prędkościami, a środek jest nieruchomy. Na rysunku (c) pokazano wynik złożenia (sumowania) odpowiednich wektorów z rysunków (a) i (b).
, przeciwległe punkty poruszają się. z przeciwnymi prędkościami, a środek jest nieruchomy. Na rysunku (c) pokazano wynik złożenia (sumowania) odpowiednich. wektorów z rysunków (a) i (b).")
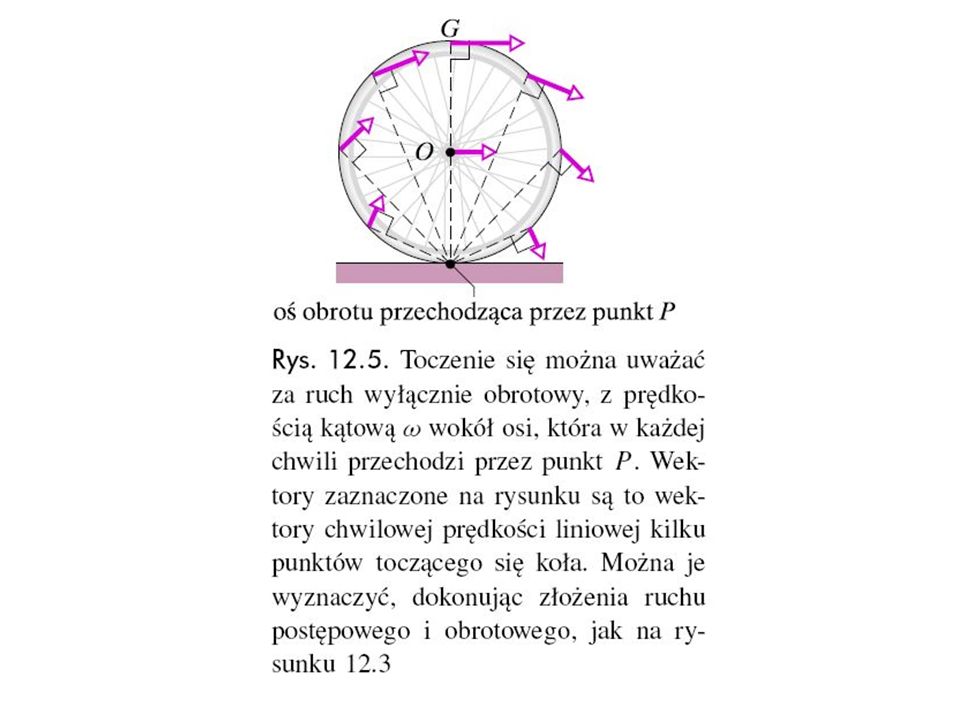
31
Podstawa walca (punkt P styczności z podłożem na rysunku poniżej)
w każdej chwili spoczywa (v = 0). Natomiast prędkość liniowa każdego innego punktu jest w dowolnej chwili prostopadła do linii łączącej ten punkt z podstawą P i proporcjonalna do odległości tego punktu od P. Oznacza to, że walec obraca się wokół punktu P. Oznacza to, że możemy toczenie opisywać również jako "czysty" ruch obrotowy ale względem osi przechodzącej przez punkt P styczności z powierzchnią, po której toczy się ciało.
. Natomiast prędkość liniowa każdego innego punktu jest w dowolnej chwili. prostopadła do linii łączącej ten punkt z podstawą P i proporcjonalna. do odległości tego punktu od P. Oznacza to, że walec obraca się wokół. punktu P. Oznacza to, że możemy toczenie opisywać również jako czysty ruch obrotowy ale względem osi przechodzącej przez punkt P styczności. z powierzchnią, po której toczy się ciało.")
33
Ruch precesyjny (bąk) Przykładem ruchu obrotowego, w którym oś obrotu nie jest nieruchomą w inercjalnym układzie odniesienia jest bąk wirujący dookoła pewnej osi symetrii.

34
Punkt podparcia bąka znajduje się w początku inercjalnego układu odniesienia.
Z doświadczenia wiemy, że oś wirującego bąka porusza się dookoła osi pionowej, zakreślając powierzchnię stożka. Taki ruch nazywamy precesją. W sytuacji przedstawionej na rysunku bąk ma prędkość kątową dookoła swej osi. Ma również moment pędu L względem tej osi, która tworzy kąt z osią pionową.

35
Na bąk działają dwie siły: siła w punkcie podparcia działa w górę i siła ciężkości
przyłożona do środka masy działa w dół. Siła reakcji działająca w górę ma zerowy moment bo ma zerowe ramię (względem punktu podparcia). Ciężar mg wytwarza jednak moment siły względem punktu podparcia: M = rF = rmg gdzie r określa położenie środka masy. Z iloczynu wektorowego wynika, że M jest prostopadłe do r i do mg M, L i r wirują dokoła osi pionowej z częstością precesji p
. Ciężar mg wytwarza jednak moment siły względem punktu podparcia: M = rF = rmg. gdzie r określa położenie środka masy. Z iloczynu wektorowego wynika, że M jest prostopadłe do r i do mg. M, L i r wirują dokoła osi pionowej z częstością precesji p.")
36
p =/M/Lsin L/Lsin L = Mt Mt/Lsin
kątowa precesja p ponieważ L << L, to mamy L/Lsin L = Mt Mt/Lsin p =/M/Lsin

37
M = rmg sin(180°‑) = rmg sin
Moment siły jest równy M = rmg sin(180°‑) = rmg sin więc ostatecznie p = rmg/L prędkość precesji nie zależy od kąta i jest odwrotnie proporcjonalna do wartości momentu pędu M = ωp x L
 = rmg sin więc ostatecznie. p = rmg/L. prędkość precesji nie zależy od kąta i jest odwrotnie. proporcjonalna do wartości momentu pędu. M = ωp x L.")