Pobierz prezentację
1
dr inż. Piotr Fabian Zakład Oprogramowania, Instytut Informatyki
PODSTAWY INFORMATYKI dr inż. Piotr Fabian Zakład Oprogramowania, Instytut Informatyki Wykład 2 BUDOWA, DZIAŁANIE I ARCHITEKTURA KOMPUTERÓW Strona przedmiotu: Wykorzystano m.in. dostępne w Sieci materiały mgr inż. Marcina Kempki oraz dr hab. Zbigniewa Postawy (UJ)
")
2
Plan Historia komputerów Rodzaje komputerów Budowa komputera
Urządzenia I/O (wejścia/wyjścia) Porty Procesor – budowa i działanie Magistrale Pamięć RAM – rodzaje, budowa, działanie
 Porty. Procesor – budowa i działanie. Magistrale. Pamięć RAM – rodzaje, budowa, działanie.")
3
Historia komputerów (1)
1500 rok Mechaniczny Kalkulator Leonarda da Vinci Wiele źródeł podaje francuskiego matematyka, fizyka i teologa, Błażeja Pascala jako wynalazcę pierwszej mechanicznej maszyny liczącej, zwanej Maszyną Arytmetyczną. Prawdopodobnie jednak pierwszy mechaniczny kalkulator mógł być wynaleziony przez Leonarda da Vinci 150 lat przed maszyną Pascala. ze strony:

4
Historia komputerów (2)
Jeden z oryginalnych schematów da Vinci Działający model urządzenia da Vinci ze stron: oraz

5
Historia komputerów (3)
1640 rok: Maszyna Arytmetyczna Błażeja Pascala W roku 1640 Pascal rozpoczął projektowanie urządzenia, które miało pomóc jego ojcu w dodawaniu kwot pieniężnych. Urządzenie Pascala mogło jedynie dodawać i odejmować, natomiast operacje mnożenia oraz dzielenia były realizowane za pomocą serii dodawań lub odejmowań (dodawań przez dopełnenie). 1670: Gottfried Wilhelm Leibnitz, maszyna mnożąca ze strony:
. 1670: Gottfried Wilhelm Leibnitz, maszyna mnożąca. ze strony:")
6
Historia komputerów (4)
Maszyna Arytmetyczna Pascala ze strony:

7
Historia komputerów (5)
1830 rok Maszyna Analityczna Charlesa Babbage'a W roku 1822, Babbage zaproponował budowę maszyny zwanej Maszyną Różnicową, której zadaniem byłoby automatyczne obliczanie tablic matematycznych. Maszyna Różnicowa była ukończona jedynie częściowo, gdy Babbage wpadł na pomysł innej, bardziej złożonej maszyny, którą nazwał Maszyną Analityczną. Maszyna Analityczna miała używać pętli utworzonych z serii kart perforowanych Jacquard’a w celu sterowania automatycznym kalkulatorem, który mógł podejmować decyzje na podstawie wyników poprzednich obliczeń. Maszyna również miała być wyposażona w kilka cech spotykanych we współczesnych komputerach, mianowicie takich jak sterowanie sekwencyjne, odgałęzienia oraz zapętlenia programu. ze strony:

8
Historia komputerów (6)
Babbage pracował nad swoją Maszyną Analityczną od około 1830 roku aż do swojej śmierci (1871), lecz niestety nigdy jej nie ukończył. Często się mówi, iż Babbage wyprzedził swoje czasy o sto lat i że ówczesna technologia nie była odpowiednia do realizacji jego dzieła. ze strony:
, lecz niestety nigdy jej nie ukończył. Często się mówi, iż Babbage wyprzedził swoje czasy o sto lat i że ówczesna technologia nie była odpowiednia do realizacji jego dzieła. ze strony:")
9
Historia komputerów (7)
Lata 1943 do 1946 Pierwszy komputer elektroniczny ogólnego przeznaczenia - ENIAC 42 szafy o rozmiarach 3 m * 30 cm * 60 cm każda 18800 lamp, 6000 przełączników, 1500 przekaźników, oporników, kondensatorów Pobór energii: 140 kW; chłodzenie: 2 * 20 kW Masa: 30 ton Moc obliczeniowa: 5000 dodawań na sekundę, 385 mnożeń na sekundę od 1941: Konrad Zuse, komputery mechaniczne i elektromechaniczne, Z3, Z4, język Plankalkül ze strony:

10
Historia komputerów (8)
Komputer ENIAC opracowany został na zlecenie Armii USA, która potrzebowała go do wykonywania żmudnych, tabelarycznych obliczeń dla nowo produkowanych dział. ze strony:

11
Historia komputerów (9)
W Stanach Zjednoczonych firma Bell Laboratories rozpoczęła badania nad półprzewodnikami w roku 1945, a fizycy William Shockley, Walter Brattain oraz John Bardeen odnieśli sukces tworząc pierwszy germanowy tranzystor ostrzowy 23 grudnia 1947 roku ze strony:

12
Historia komputerów (10)
W czasie trwania wojny odkryto, iż urządzenia zbudowane na bazie półprzewodników mogą być potencjalnymi wzmacniaczami i przełącznikami i dlatego mogą one zastąpić panującą wtedy powszechnie technologię lamp próżniowych, lecz byłyby dużo mniejsze, lżejsze i wymagały by mniej energii. W roku 1950 Shockley wynalazł nowy element półprzewodnikowy, zwany tranzystorem o złączu bipolarnym, który był bardziej niezawodny, łatwiejszy i tańszy w produkcji oraz posiadał bardziej stabilne parametry od elementów ostrzowo-złączowych. ze strony:

13
Historia komputerów (11)
Indywidualnie pakowane tranzystory były dużo mniejsze od ich poprzedników lamopwych, lecz inżynierowie wciąż życzyli sobie mniejszych przełączników elektronicznych. W dużym stopniu żądanie miniaturyzacji napędzane było przez wymagania amerykańskiego programu kosmicznego. Już od pewnego czasu ludzie sądzili, iż dobrze byłoby móc produkować całe obwody elektroniczne na pojedynczym kawałku półprzewodnika – układy scalone. ze strony:

14
Historia komputerów (12)
Jeden z pierwszych układów scalonych ok. 1958 Jack Kilby ( ) z pierwszym układem scalonym ze strony:
 z pierwszym układem scalonym. ze strony:")
15
Historia komputerów (13)
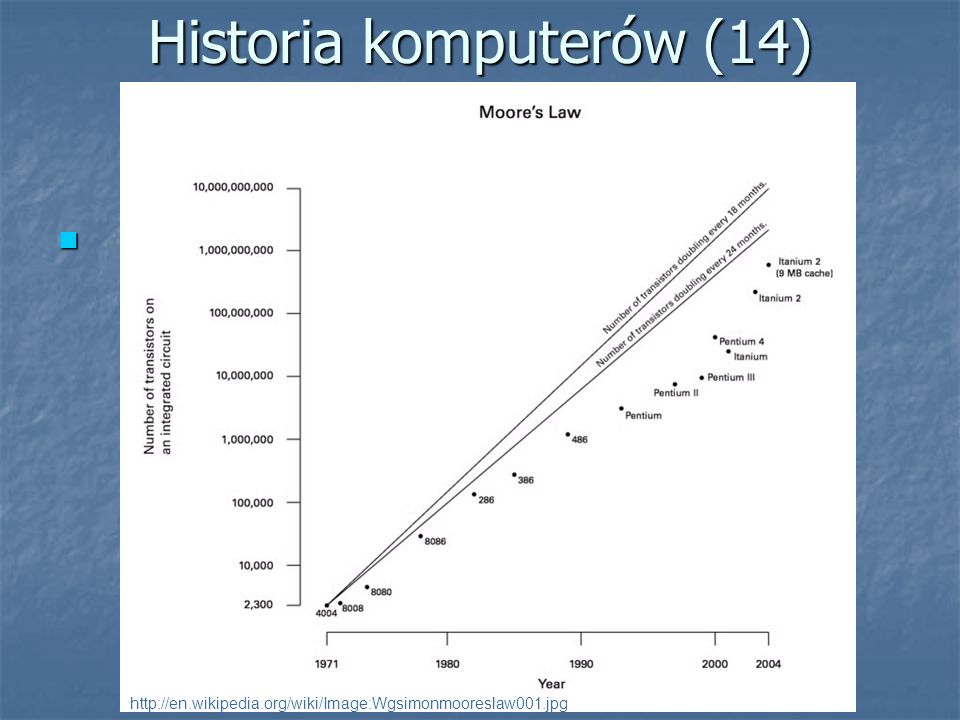
Prawo Moore’a (1965): Złożoność układów cyfrowych stosowanych w komputerach podwaja się co 18 miesięcy. Dotyczy do pamięci, mocy obliczeniowej itp.
: Złożoność układów cyfrowych stosowanych w komputerach podwaja się co 18 miesięcy. Dotyczy do pamięci, mocy obliczeniowej itp.")
16
Historia komputerów (14)
17
Rodzaje komputerów (1) Komputery sterujące
Embedded computers, mikroprocesory wbudowane w różne urządzenia, np. samochody, pralki, tostery, windy, maszyny do szycia. Elektroniczne dodatki w ciele człowieka: układy monitorujące pracę organizmu, rozruszniki serca, bioprotezy ze strony:

18
Rodzaje komputerów (2) Komputery kieszonkowe
Komputerki naręczne, w zegarkach. Notesy menedżerskie. P/PC, Palmtopy, komputerki trzymane w dłoni. H/PC, Handheld PC, komputerki trzymane w ręce. PDA - Personal Digital Assistants, osobisty asystent cyfrowy. Tablet PC Zintegrowane urządzenia komputerowo-komunikacyjne. ze strony:

19
Rodzaje komputerów (3) Casio GPS Pathfinder - wbudowany GPS (Global Positioning System). Casio Wrist Camera: 1 MB RAM, ekranik LCD, kamera 28K pikseli, komunikacja przez IrDA. ze strony:
. Casio Wrist Camera: 1 MB RAM, ekranik LCD, kamera 28K pikseli, komunikacja przez IrDA. ze strony:")
20
Rodzaje komputerów (4) Palmtopy, P/PC
Działają głównie z systemami operacyjnymi PalmOS, Windows CE lub własnymi. Mają często rysiki i rozpoznają pismo ręczne. Zapewniają pełną wymianę plików (ale nie programów) z komputerami osobistymi PC dla wielu typowych programów. Mają możliwości wczytywania programów dla nich napisanych. Akumulatory wytrzymują tygodnie bez ładowania. ze strony:
 z komputerami osobistymi PC dla wielu typowych programów. Mają możliwości wczytywania programów dla nich napisanych. Akumulatory wytrzymują tygodnie bez ładowania. ze strony:")
21
Rodzaje komputerów (5) H/PC, Handheld PC
Podobne do P/PC, często z systemem operacyjnym Windows CE. Wykorzystanie rysików i czasem dołączane klawiatury. Możliwość dołączenia do Internetu przez telefon komórkowy. Możliwości muzyczne odtwarzania plików MP3/WMA. Liczne akcesoria i możliwości rozszerzeń za pomocą nietypowych modułów. ze strony:

22
Rodzaje komputerów (6) PDA - Personal Digital Assistant
Programy aplikacyjne: komputer o możliwościach PC. Dołączane klawiatury i możliwość korzystania z rysika. Mozliwości pracy w Internecie. Rozszerzenia typu PC-Card jak dla notebooków. ze strony:

23
Rodzaje komputerów (7) Notesy menadżerskie
wiekszość oprogramowania w ROMie; brak możliwości wczytywania nowych programów; wymiana plików z PC; działają na baterii miesiącami; często niewielkie - rozmiarów karty kredytowej, np. Xircom Rex ze strony:

24
Rodzaje komputerów (8) Notebooki Mikro-notebooki
Notebook, laptop - wielkością zbliżone do kartki formatu A4, waga 1-5 kg. Mikro-notebooki Mikro-notebooki, np. Toshiba Libretto kg, z Windows, w pełni sprawny PC, ale za mała klawiatura by wygodnie pracować. ze strony:

25
Rodzaje komputerów (9) Komputery osobiste Komputery osobiste IBM-PC
Komputery firmy Apple ze strony:

26
Rodzaje komputerów (10) Stacje robocze - workstations
moc obliczeniowa, system wielodostępny, wbudowane możliwości komunikacji Mainframes - komputery centralne architektura SMP - symetryczna wieloprocesorowa, wspólna pamięć, < 1000 procesorów, zwykle <64 (symmetric multiprocessors) architektura MPP - niezależna wieloprocesorowa, oddzielna pamięć dla każdego procesora, nawet ponad 1000 procesorów (Massively Parallel Processing) ze strony:
 architektura MPP - niezależna wieloprocesorowa, oddzielna pamięć dla każdego procesora, nawet ponad 1000 procesorów (Massively Parallel Processing) ze strony:")
27
Rodzaje komputerów (11) Superkomputery
IBM Blue Gene, 1 milion procesorów, prędkość ok. Petaflopa, czyli 1015 operacji/sekundę, porównywalna z mocą obliczeniową całego mózgu! PC z Pentium 4/2.5 GHz osiąga około 2.3 Gflopa Superkomputery graficzne: RenderDrive, 100 razy szybszy od PC, sprzętowo realizuje funkcje renderingu scen. ze strony:

28
Porównanie mocy obliczeniowej
* * * urządzenie uniwersalne * Rysunek z ROBOT, Moravec, Oxford, 1998, rozdział 3: Power and Presence, page 58

29
Ekstrapolacja mocy obliczeniowej
Rysunek z ROBOT, Moravec, Oxford, 1998

30
Budowa komputera (1) Koncepcja von Neumanna sterowanie
Procesor Pamięć Urządzenia we/wy sterowanie mag. danych mag. adresowa Koncepcja von Neumanna

31
Budowa komputera (2) JEDNOSTKA CENTRALNA Procesor
Urządzenia wejścia Urządzenia wyjścia Pamięć operacyjna Komputer = Jednostka Centralna + Urządzenia Zewnętrzne Jednostka Centralna = Procesor + Pamięć Operacyjna

32
Budowa komputera (3) Funkcją urządzeń peryferyjnych (zewnętrznych) jest dostarczanie lub odbieranie informacji (danych lub rozkazów) do lub z jednostki centralnej. Wyróżniamy następujące grupy urządzeń peryferyjnych: urządzenia wejściowe urządzenia wyjściowe urządzenia wejściowo - wyjściowe
 jest dostarczanie lub odbieranie informacji (danych lub rozkazów) do lub z jednostki centralnej. Wyróżniamy następujące grupy urządzeń peryferyjnych: urządzenia wejściowe. urządzenia wyjściowe. urządzenia wejściowo - wyjściowe.")
33
Budowa Komputera (4) Przykładowe urządzenia wejściowe: Klawiatura
Myszka Skaner Karta sieciowa Joystick Modem

34
Budowa Komputera (5) Przykładowe urządzenia wyjściowe: Monitor Ploter
Drukarka Karta sieciowa Rzutnik Modem

35
Budowa Komputera (6) Traktując problem klasyfikacji ogólnie możemy powiedzieć, że: Urządzenia wejściowe przesyłają informacje do jednostki centralnej Urządzenia wyjściowe odbierają informacje z jednostki centralnej

36
Płyta główna komputera PC (1)
PŁYTA GŁÓWNA - (ang. mainboard lub motherboard) stanowi najważniejszy element całego komputera, jest jego swoistym kręgosłupem stanowiącym bazę do instalowania pozostałych elementów komputera. To za jej pośrednictwem odbywa się wzajemna komunikacja między poszczególnymi zainstalowanymi w komputerze urządzeniami. Od jej rodzaju zależy jakimi możliwościami rozbudowy będzie dysponował komputer, jakie urządzenia będzie mógł obsługiwać oraz decyduje o wyborze komponentów z jakimi będzie mógł współpracować - rodzaj procesora, pamięci, kart rozszerzających czy obudowy. ze strony:
 stanowi najważniejszy element całego komputera, jest jego swoistym kręgosłupem stanowiącym bazę do instalowania pozostałych elementów komputera. To za jej pośrednictwem odbywa się wzajemna komunikacja między poszczególnymi zainstalowanymi w komputerze urządzeniami. Od jej rodzaju zależy jakimi możliwościami rozbudowy będzie dysponował komputer, jakie urządzenia będzie mógł obsługiwać oraz decyduje o wyborze komponentów z jakimi będzie mógł współpracować - rodzaj procesora, pamięci, kart rozszerzających czy obudowy. ze strony:")
37
Płyta główna (2)
")
38
Płyta główna (3) Obecnie najbardziej popularnym standardem płyt głównych jest ATX. zintegrowane z płytą wszystkie gniazda wyprowadzeń Format ATX posiada kilka odmian, są to: mini ATX mikro ATX (maks. 4 karty ISA, PCI lub AGP i zwykle tylko dwa moduły pamięci DIMM)
")
39
Płyta główna (4) Chipsety są układami scalonymi stanowiącymi integralną część płyty głównej. Od strony funkcjonalnej chipset składa się z wielu modułów, których zadaniem jest integracja oraz zapewnienie współpracy poszczególnych komponentów komputera (procesora, dysków twardych, monitora, klawiatury, magistrali ISA, PCI, AGP pamięci DRAM, SRAM i innych). ze strony:
. ze strony:")
40
Płyta główna (5) Trzon każdego chipsetu stanowi:
kontroler CPU, kontroler pamięci operacyjnej RAM, kontroler pamięci cache, kontroler magistral ISA, PCI, PCIExpress i innych. Dodatkowo w chipsecie zintegrowane są najczęsciej elementy takie jak: kontroler IDE, SCSI, FDD i innych, kontroler klawiatury (KBC), przerwań IRQ, kanałów DMA, układ zegara rzeczywistego (RTC), układy zarządzania energią (power management) kontroler układów wejścia / wyjścia kontroler takich interfejsów jak: AGP, UMA, adapterów graficznych i muzycznych. ze strony:
, przerwań IRQ, kanałów DMA, układ zegara rzeczywistego (RTC), układy zarządzania energią (power management) kontroler układów wejścia / wyjścia. kontroler takich interfejsów jak: AGP, UMA, adapterów graficznych i muzycznych. ze strony:")
41
Płyta główna (6) Chipset stanowi "serce" płyty głównej i odpowiada za sterowanie przepływem strumienia danych Zwykle jest podzielony logicznie na dwa osobne układy, tzw. mostki: mostek południowy (ang. south bridge) współpraca z urządzeniami we/wy, np. dyskiem, kartami rozszerzeń mostek północny (ang. north bridge) wymiana danych między pamięcią a procesorem, sterowanie magistralą AGP ze strony:
 współpraca z urządzeniami we/wy, np. dyskiem, kartami rozszerzeń. mostek północny (ang. north bridge) wymiana danych między pamięcią a procesorem, sterowanie magistralą AGP. ze strony:")
42
Płyta główna (7) Schemat blokowy chipsetu Intel 845
 Schemat blokowy chipsetu Intel 845")
43
Porty – komunikacja z urządz. I/O
LPT COM PS2 USB JACK

44
Porty – komunikacja z urządz. I/O
LPT PS2 Audio COM USB Video/FireWire Mainboard i915G Combo

45
PS/2 ...klawiatura, myszka... ze strony:

46
VGA ...monitor z wejściem analogowym...
ze strony:

47
DVI ...monitor z wejściem cyfrowym...
ze strony:

48
LPT (DB25) ...drukarka... ze strony:

49
RJ-45 ...sieć - Ethernet... ze strony:

50
S-Video ...telewizor, kamera itp. - analogowo...
ze strony:

51
USB ...drukarka, skaner, pendrive i inne urządzenia...
ze strony:

52
FireWire (IEEE-1394) ...kamera cyfrowa, sieć i inne urządzenia...
ze strony:

53
RJ-11 ...modem, telefon... ze strony:

54
Mini jack ...głośniczki, mikrofon...
ze strony:

55
USB USB (ang.Universal Serial Bus - uniwersalna magistrala szeregowa) to typ złącza, pozwalającego na podłączanie do komputera urządzeń cyfrowych (takich jak: kamery video, aparaty fotograficzne, skanery, drukarki, itp). Urządzenia w tym standardzie można łączyć ze sobą tworząc sieć. W całej sieci można podłączyć do 127 urządzeń USB. W jednej sieci mogą pracować urządzenia o różnych prędkościach transmisji. ze strony:
 to typ złącza, pozwalającego na podłączanie do komputera urządzeń cyfrowych (takich jak: kamery video, aparaty fotograficzne, skanery, drukarki, itp). Urządzenia w tym standardzie można łączyć ze sobą tworząc sieć. W całej sieci można podłączyć do 127 urządzeń USB. W jednej sieci mogą pracować urządzenia o różnych prędkościach transmisji. ze strony:")
56
FireWire FireWire to popularna nazwa interfejsu IEEE-1394 lansowana przez firmę Apple. FireWire jest odpowiedzią firmy na standard USB 2.0. FireWire jest szeregową magistralą ogólnego przeznaczenia, jednak ze względu na lansowanie jej przez Apple jako wyjątkowo multimedialnej jest kojarzona prawie wyłącznie z kamerami cyfrowymi. Nazwa FireWire obejmuje kilka standardów komunikacji zapewniających transfer rzędu: 100, 200, 400 Mbit/s. Najnowsza specyfikacja IEEE-1394b dopuszcza również przesył z prędkością 800 Mbit/s. FireWire odmiennie niż USB zarządza magistralą. Nie wymaga przy tym kontrolera magistrali czyli hosta. W standardzie USB na jednej magistrali może znajdować się tylko jeden host, jest nim zawsze komputer. W FireWire urządzenia są równouprawnione, co powoduje, że transmisja może odbywać się między urządzeniami na magistrali nawet bez komputera. ze strony:

57
Porównanie USB/FireWire
ze strony:

58
RS-232 – Port szeregowy RS-232 jest stykiem przeznaczonym do szeregowej transmisji danych. Specyfikacja opisuje 25 styków. Najbardziej popularna wersja tego standardu, RS-232-C pozwala na transfer na odległość nie przekraczającą 15 m z szybkością maksymalną 20 kbit/s. ze strony:

59
LPT – Port równoległy (1)
Port równoległy (ang. Parallel Port) jeden z portów komunikacyjnych komputera. Obok portu szeregowego jeden z najczęściej stosowanych. Port ten umożliwia równoległy przesył n bitów, co w porównaniu z transmisją szeregową znacznie przyśpiesza transfer. ze strony:
 jeden z portów komunikacyjnych komputera. Obok portu szeregowego jeden z najczęściej stosowanych. Port ten umożliwia równoległy przesył n bitów, co w porównaniu z transmisją szeregową znacznie przyśpiesza transfer. ze strony:")
60
LPT – Port równoległy (2)
Port równoległy doczekał się pięciu trybów działania: SPP - Standard Parallel Ports - to najstarsza specyfikacja. Port zapewnia najniższy transfer (150 KB/s). Komunikacja może być dwukierunkowa. Nibble Mode - tryb półbajtowy (cztero bitowy). Byte Mode - tryb bajtowy (ośmio bitowy). EPP - Enhanced Parallel Port - najczęściej stosowany standard. Prędkość odpowiada prędkości ECP. Port równoległy nie używa jednak kanału DMA. ECP - Enhanced Capabilities Port - port używa DMA i oferuje najwyższe prędkości (do 3 MB/s). ze strony:
. Komunikacja może być dwukierunkowa. Nibble Mode - tryb półbajtowy (cztero bitowy). Byte Mode - tryb bajtowy (ośmio bitowy). EPP - Enhanced Parallel Port - najczęściej stosowany standard. Prędkość odpowiada prędkości ECP. Port równoległy nie używa jednak kanału DMA. ECP - Enhanced Capabilities Port - port używa DMA i oferuje najwyższe prędkości (do 3 MB/s). ze strony:")
61
Magistrale (1) Magistrala grupuje wspólne dla kilku urządzeń połączenia wykorzystywane do przesyłania sygnałów, nadawanych z jednego z kilku możliwych źródeł do jednego lub kilku miejsc przeznaczenia. Zwykle o dostęp do magistrali może ubiegać się kilka urządzeń. Jeśli wysyłane sygnały maja być poprawnie odebrane to, w danej chwili, liniami magistrali powinno sterować tylko jedno urządzenie. Natomiast dane transmitowane magistrala mogą być odbierane przez wszystkie urządzenia do niej dołączone. W systemach komputerowych występują różne magistrale łączące układy wykorzystywane na różnych poziomach systemowej hierarchii. Na następnym slajdzie podano niektóre istotne parametry charakteryzujące magistrale transmisji danych: z opracowania Tomasza Jamrógiewicza

62
Magistrale (2) Sposób wykorzystania linii magistrali
Szerokość ścieżki danych - liczba równoległych linii umożliwiających jednoczesną transmisję bitów danych. Sposób potwierdzania przesłania danych - transmisja synchroniczna lub asynchroniczna. Taktowanie - częstotliwość zegara taktującego (o ile występuje). Rodzaje operacji transmisji danych - zapis, odczyt, odczyt-modyfikacja-zapis, odczyt kontrolny, blokowe przesyłanie danych. Arbitraż dostępu - centralny lub rozproszony. z opracowania Tomasza Jamrógiewicza
. Rodzaje operacji transmisji danych - zapis, odczyt, odczyt-modyfikacja-zapis, odczyt kontrolny, blokowe przesyłanie danych. Arbitraż dostępu - centralny lub rozproszony. z opracowania Tomasza Jamrógiewicza.")
63
Magistrale - ISA ISA (ang. Industry standard architecture - standardowa architektura przemysłu) to standard magistrali i łącza dla komputerów osobistych wprowadzony w roku 1984, jako rozszerzenie architektury XT do postaci szesnastobitowej. Służy do przyłączania kart rozszerzeń do płyty głównej. Pod koniec lat dziewięćdziesiątych dwudziestego wieku znaczenie tej architektury zaczęło maleć, a jej funkcje przejmował standard PCI. ze strony:
 to standard magistrali i łącza dla komputerów osobistych wprowadzony w roku 1984, jako rozszerzenie architektury XT do postaci szesnastobitowej. Służy do przyłączania kart rozszerzeń do płyty głównej. Pod koniec lat dziewięćdziesiątych dwudziestego wieku znaczenie tej architektury zaczęło maleć, a jej funkcje przejmował standard PCI. ze strony:")
64
Magistrale - PCI W normie PCI Local Bus wydanej przez PCI Special Interest Group, zdefiniowano magistrale 32.bitową, ze wspólnymi przełączanymi liniami adresu i danych, synchronizowaną przebiegiem zegarowym o częstotliwości do 33 MHz. Przewidziano możliwość rozszerzenia ścieżki danych do 64 bitów i wprowadzenia dodatkowej częstotliwości zegara taktującego równej 66 MHz. Przyjęty protokół transmisji danych dostosowany jest do przesyłania sekwencyjnego. Przy częstotliwości zegara 33 MHz, magistrala PCI można transmitować 32-bitowe dane z szybkością do Megabajtów/sekundę. 64-bitowe rozszerzenie i zastosowanie zegara 66 MHz pozwala tą szybkość zwiększyć czterokrotnie. ze strony:

65
Magistrale – AGP (1) Accelerated Graphics Port (AGP czasem nazywany Advanced Graphics Port) to rodzaj zmodyfikowanej magistrali PCI opracowanej przez firmę Intel. Jest to 32-bitowa magistrala PCI zoptymalizowana do szybkiego przesyłania dużych ilości danych pomiędzy pamięcią operacyjną a kartą graficzną. Niektórzy nie uważają jej za magistralą ponieważ umożliwia połączenie jedynie dwóch elementów: karty graficznej i chipsetu płyt głównej. Niektóre płyty główne posiadają więcej niż jeden slot AGP. Pierwsza wersja AGP, dziś nazywana AGP 1.0 lub AGP 1x, używa 32-bitowej szerokości magistrali przy taktowaniu 66 MHz i napięciu 1.5 V lub 3.3 V. Maksymalny transfer jest ograniczony do 266 MB/s. ze strony:
 to rodzaj zmodyfikowanej magistrali PCI opracowanej przez firmę Intel. Jest to 32-bitowa magistrala PCI zoptymalizowana do szybkiego przesyłania dużych ilości danych pomiędzy pamięcią operacyjną a kartą graficzną. Niektórzy nie uważają jej za magistralą ponieważ umożliwia połączenie jedynie dwóch elementów: karty graficznej i chipsetu płyt głównej. Niektóre płyty główne posiadają więcej niż jeden slot AGP. Pierwsza wersja AGP, dziś nazywana AGP 1.0 lub AGP 1x, używa 32-bitowej szerokości magistrali przy taktowaniu 66 MHz i napięciu 1.5 V lub 3.3 V. Maksymalny transfer jest ograniczony do 266 MB/s. ze strony:")
66
Magistrale – AGP (2) AGP 2x używa wciąż magistrali o szerokości 32 bitów i taktowania 66 MHz lecz transfer odbywa się tu na obu zboczach sygnału zegarowego (efektywna częstotliwość 133 MHz) co umożliwia transfer na poziomie 533 MB/s. Napięcie jest identyczne jak w AGP 1x. AGP 4x posługuje się taktowaniem 133 MHz i transferem na obu zboczach i w rezultacie maksymalny transfer 1066 MB/s. Napięcie zredukowano do 1.5 V. AGP 8x to transfer na obu zboczach ale przy częstotliwości 266 MHz; transfer 2133 MB/s. Standard ten obniża napięcie do 0.8 V. ze strony:
 co umożliwia transfer na poziomie 533 MB/s. Napięcie jest identyczne jak w AGP 1x. AGP 4x posługuje się taktowaniem 133 MHz i transferem na obu zboczach i w rezultacie maksymalny transfer 1066 MB/s. Napięcie zredukowano do 1.5 V. AGP 8x to transfer na obu zboczach ale przy częstotliwości 266 MHz; transfer 2133 MB/s. Standard ten obniża napięcie do 0.8 V. ze strony:")
67
Magistrale (3)
")
68
Procesor (1) CPU (Central Processing Unit)
Pierwszy mikroprocesor – Intel 4004 (1971 rok) Potrafił jedynie dodawać i odejmować liczby 4-bitowe Pierwszy „domowy” procesor – 8080 (1974 rok)
 Potrafił jedynie dodawać i odejmować liczby 4-bitowe. Pierwszy „domowy procesor – 8080 (1974 rok)")
69
Procesor (2) liczba tranzystorów szerokość ścieżki
liczba milionów instrukcji na sekundę

70
Procesor (3) zależność między MIPS a częstotliwością taktowania
kompatybilność procesorów wstecz Instrukcje a cykle zegara średnia liczba cykli zegara na wykonanie pojedynczej instrukcji Częstotliwość zegara = Liczba MIPS

71
Procesor (4) Procesor wykonuje kolekcje instrukcji zapisanych w języku maszynowym. Na podstawie tych instrukcji procesor potrafi „wykonać” trzy podstawowe rzeczy: przy pomocy ALU potrafi wykonać operacje takie jak np. dodawanie czy mnożenie przenosić dane z jednego „miejsca” w drugie potrafi podjąć decyzję, „skoczyć” i wykonać inny zestaw instrukcji

72
Procesor (5)
")
73
Procesor (6)
")
74
Procesor (7) Procesor + pamięć = jednostka centralna
Fazy wykonania rozkazu: pobranie i zdekodowanie rozkazu wykonanie określonej w rozkazie operacji ustalenie adresu następnego rozkazu do wykonania Takty a cykle pracy procesora …

75
Procesor (8) Chłodzenie pasta radiator wentylator
 Chłodzenie pasta radiator wentylator")
76
Pamięć (1) Pamięci dzielimy na: Ulotne - Pamięci RAM
Statyczne - SRAM Statyczne VideoRAM Dynamiczne - DRAM Nieulotne - Pamięci ROM ROM PROM EPROM EEPROM Flash-ROM ze strony:

77
Pamięci (2) RAM - Random Access Memory - Pamięć o swobodnym dostępie - posiada możliwość odczytu i zapisu. Zawartość takiej pamięci jest tracona po zaniku zasilania. ROM - Read Only Memory - Pamięć tylko do odczytu - posiada jedynie możliwość odczytu, niektóre rodzaje posiadają możliwość zaprogramowania nowej zawartości przez użytkownika. Zawartość tej pamięci jest utrzymywana po wyłączeniu zasilania. ze strony:

78
Pamięci (3) SRAM - Pamięć statyczna RAM. Pamięci tego typu są zbudowane z przerzutników bistabilnych przechowujących bity informacji. Ze względu na wysoki koszt produkcji pamięci te są stosowane jedynie w niektórych podzespołach i nie są wykorzystywane jako pamięć podstawowa komputerów. Ze względu na dużą szybkość działania znalazły one zastosowanie w układach buforujących - pamięć cache. ze strony:

79
Pamięci (4) DRAM - Pamięć dynamiczna RAM. Pamięci tego typu są zbudowane z macierzy kondensatorów przechowujących bity informacji w postaci ładunków elektrycznych. Pamięci te są znacznie tańsze od pamięci statycznych - każda komórka pamięci składa się tylko z jednego tranzystora(złącze emiterowe i podłoże układu tworzą kondensator). Takie rozwiązanie posiada również swoje wady - konieczność nieustannego odświeżania zawartości pamięci. Również adresowanie tej pamięci jest bardziej skomplikowane. Adres komórki pamięci jest podawany w dwóch etapach - adres wiersza (wczytywany przy sygnale RAS), a potem adres kolumny (wczytywany przy sygnale CAS). Adresy komórek pamięci są multipleksowane, co dodatkowo wydłuża cykl odczytu. Wyżej wymienione cechy powodują, iż pamięć ta jest zbyt wolna do wielu zastosowań. Obecnie najszersze zastosowanie tej pamięci to pamięć podstawowa komputerów. ze strony:
. Takie rozwiązanie posiada również swoje wady - konieczność nieustannego odświeżania zawartości pamięci. Również adresowanie tej pamięci jest bardziej skomplikowane. Adres komórki pamięci jest podawany w dwóch etapach - adres wiersza (wczytywany przy sygnale RAS), a potem adres kolumny (wczytywany przy sygnale CAS). Adresy komórek pamięci są multipleksowane, co dodatkowo wydłuża cykl odczytu. Wyżej wymienione cechy powodują, iż pamięć ta jest zbyt wolna do wielu zastosowań. Obecnie najszersze zastosowanie tej pamięci to pamięć podstawowa komputerów. ze strony:")
80
Pamięci (5) ROM - pamięć tylko do odczytu (Read Only Memory). Informacja zawarta w tej pamięci jest zapisywana w czasie produkcji w formie maski na podstawie dostarczonego wzorca. Nie ma możliwości zmiany zawartości tej pamięci. Używana w urządzeniach produkowanych seryjnie. ze strony:
. Informacja zawarta w tej pamięci jest zapisywana w czasie produkcji w formie maski na podstawie dostarczonego wzorca. Nie ma możliwości zmiany zawartości tej pamięci. Używana w urządzeniach produkowanych seryjnie. ze strony:")
81
Pamięci (6) EPROM - Pamięć stała, programowana elektrycznie (erasable programmable read-only memory). Użytkownik może sam zapisywać do niej informacje. Gdy układ posiada okienko ze szkła kwarcowego, można pamięć kasować i programować ponownie. Kasowanie odbywa się przez naświetlanie ultrafioletem. Układy EPROM mogą być kasowane i ponownie programowane około 100 razy. Pamięci te występują również w odmianie OTP (One Time Programable) - mogą być zapisane przez użytkownika jeden raz, bez możliwości skasowania. Ta odmiana jest tańsza ze względu na rodzaj obudowy - pamięci wielokrotnie programowalne mają obudowę ceramiczną, a pamięci OTP obudowę plastikową. ze strony:
. Użytkownik może sam zapisywać do niej informacje. Gdy układ posiada okienko ze szkła kwarcowego, można pamięć kasować i programować ponownie. Kasowanie odbywa się przez naświetlanie ultrafioletem. Układy EPROM mogą być kasowane i ponownie programowane około 100 razy. Pamięci te występują również w odmianie OTP (One Time Programable) - mogą być zapisane przez użytkownika jeden raz, bez możliwości skasowania. Ta odmiana jest tańsza ze względu na rodzaj obudowy - pamięci wielokrotnie programowalne mają obudowę ceramiczną, a pamięci OTP obudowę plastikową. ze strony:")
82
Pamięci (7) FlashROM - Pamięć stała, obecnie coraz częściej używana ze względu na niski koszt produkcji i łatwość programowania. Do ponownego zaprogramowania tej pamięci nie są potrzebne specjalistyczne urządzenia, wystarczy odpowiednie oprogramowanie dla sprzętu, w którym kość została użyta. Kasowanie tej pamięci trwa kilka sekund. ze strony:

83
DMA DMA (Direct Memory Access - bezpośredni dostęp do pamięci) jest to technika, w której inne układy (np. kontroler dysku twardego, karta dźwiękowa, itd) mogą korzystać z pamięci operacyjnej RAM lub (czasami) portów we-wy pomijając przy tym procesor główny – CPU. Wymaga to współpracy ze strony procesora, który musi zaprogramować kontroler DMA do wykonania odpowiedniego transferu, a następnie na czas przesyłania danych zwolnić magistralę systemową (przejść w stan wysokiej impedancji). Realizacja cykli DMA może przez urządzenie być zrzucona na specjalny układ (np. w komputerach PC) lub być realizowana samodzielnie przez urządzenie. DMA ma za zadanie odciążyć procesor główny od samego przesyłania danych z miejsca na miejsce
 jest to technika, w której inne układy (np. kontroler dysku twardego, karta dźwiękowa, itd) mogą korzystać z pamięci operacyjnej RAM lub (czasami) portów we-wy pomijając przy tym procesor główny – CPU. Wymaga to współpracy ze strony procesora, który musi zaprogramować kontroler DMA do wykonania odpowiedniego transferu, a następnie na czas przesyłania danych zwolnić magistralę systemową (przejść w stan wysokiej impedancji). Realizacja cykli DMA może przez urządzenie być zrzucona na specjalny układ (np. w komputerach PC) lub być realizowana samodzielnie przez urządzenie. DMA ma za zadanie odciążyć procesor główny od samego przesyłania danych z miejsca na miejsce.")
84
Przerwania – IRQ (1) Skrót IRQ pochodzi od angielskiego terminu Interrupt Request - co możemy przetłumaczyć jako żądanie przerwania. Przerwania dzielą się na trzy grupy: sprzętowe - generowane przez urządzenia komputera takie jak klawiatura, czy dysk; wyjątkowe - generowane gdy wystąpi błąd w samym programie; programowe - generowane gdy wykonywany program potrzebuje skorzystać z dodatkowej usługi

85
Przerwania – IRQ (2) Po uruchomieniu komputera i wczytaniu systemu operacyjnego komputer oczekuje na wystąpienie jakiegoś zdarzenia. Zdarzenie to jest sygnalizowane przez sprzęt lub oprogramowanie za pomocą specjalnego sygnału zwanego przerwaniem (ang. interrupt). Z chwila pojawienia się przerwania procesor zaczyna zajmować się żądaniem zgłoszonym przez sprzęt lub oprogramowanie, które to żądanie zgłosiło. Każde przerwanie ma swój numer oraz procedurę, która zajmuje się obsługą tego przerwania. Dzięki przerwaniom komputer może zajmować się kilkoma rzeczami na raz, a procesor może dzielić swój cenny czas między różne zdarzenia (na przykład obliczenia, obsługę klawiatury, myszki, itp.). Przerwania pozwalają odłożyć wykonywanie jednego zadania i zając się innym.
. Z chwila pojawienia się przerwania procesor zaczyna zajmować się żądaniem zgłoszonym przez sprzęt lub oprogramowanie, które to żądanie zgłosiło. Każde przerwanie ma swój numer oraz procedurę, która zajmuje się obsługą tego przerwania. Dzięki przerwaniom komputer może zajmować się kilkoma rzeczami na raz, a procesor może dzielić swój cenny czas między różne zdarzenia (na przykład obliczenia, obsługę klawiatury, myszki, itp.). Przerwania pozwalają odłożyć wykonywanie jednego zadania i zając się innym.")
86
Pomocne materiały Do przygotowania tej prezentacji wykorzystano następujące materiały: elementy prezentacji „Podstawy Informatyki I” dr hab. Zbigniewa Postawy (UJ) elementy strony elementy strony Włodzisława Ducha elementy strony elementy strony elementy opracowania Tomasza Jamrógiewicza: „PCI”
 elementy strony elementy strony Włodzisława Ducha elementy strony elementy strony elementy opracowania Tomasza Jamrógiewicza: „PCI")
87
Zapraszam za tydzień na wykład: Urządzenia peryferyjne komputerów
Dziękuję za uwagę Zapraszam za tydzień na wykład: Urządzenia peryferyjne komputerów





















