Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
PROJEKT GRUPOWY SYSTEM ANTYKOLIZYJNY DLA ROBOTÓW PRZEMYSŁOWYCH Grupa: P. Bocian K. Czułkowski A. Hryniewicz opiekun: mgr inż. Piotr Fiertek

2
PLAN PREZENTACJI Założenia projektowe Zadania do zrealizowania Zastosowane technologie Dotychczasowe osiągnięcia Analiza ryzyka w projekcie

3
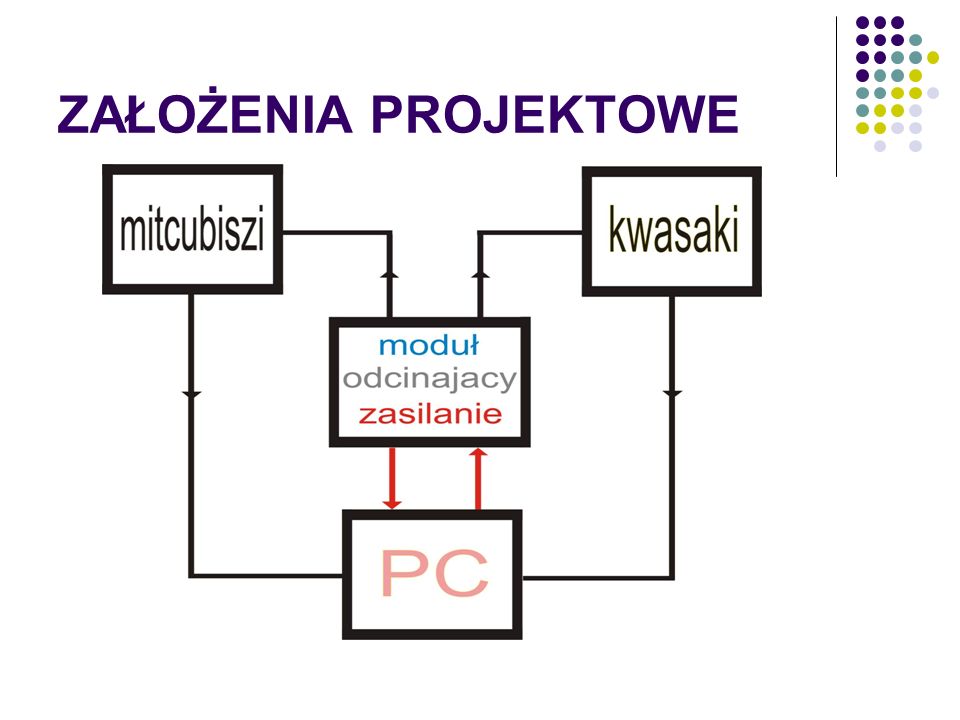
ZAŁOŻENIA PROJEKTOWE

5
ZADANIA DO ZREALIZOWANIA SOFTWARE: Aplikacja realizująca wczytanie modeli robotów oraz otoczenia, tworząca ich matematyczne modele i dokonująca detekcji kolizji. HARDWARE Realizacja modułu odcinającego zasilanie r.p. w przypadku w.k przez a.d.n.k.k.pc, który będzie dołączony do szafy sterowniczej robotów.

6
HARDWARE elementy sterujące zasilaniem R.P. (projektowanie redundancyjne, 2 przekaźniki w szereg, itELEMENTY STERUJĄCE ZASILANIEM R.P.(PROJEKTOWANIE REDUNDANCYJNE, 2 PRZEKAŹNIKI W SZEREG, ITP..) DODATKOWE ELEMENTY NA PŁYTCE (ZŁĄCZE DO PROGRAMOWANIA, DIODY ITP.)
 DODATKOWE ELEMENTY NA PŁYTCE (ZŁĄCZE DO PROGRAMOWANIA, DIODY ITP.).")
7
SOFTWARE komunikacja z płytką (TCP) komunikacja z robotami (TCP) wczytanie z plików modeli 3D robotów oraz transporterów pomiędzy robotami, stworzenie modeli matematycznych zamodelowanie kinematyki robotów estymacja położenia robotów i wykrywanie kolizji trójwymiarowa wizualizacja
 komunikacja z robotami (TCP) wczytanie z plików modeli 3D robotów oraz transporterów pomiędzy robotami, stworzenie modeli matematycznych zamodelowanie kinematyki robotów estymacja położenia robotów i wykrywanie kolizji trójwymiarowa wizualizacja")
8
Zastosowane technologie INTER KOMUNIKACYJNY RS232 prostsza realizacja (tańszy układ) potrzebna przejściówka USB-RS powoli wychodzi z użycia TCP/IP ujednolicenie interfejsów w laboratorium, pozostałe moduły komunikują się przez TCP
 potrzebna przejściówka USB-RS powoli wychodzi z użycia TCP/IP ujednolicenie interfejsów w laboratorium, pozostałe moduły komunikują się przez TCP")
9
Zastosowane technologie JĘZYK PROGRAMOWANIA C++ szybsze działanie aplikacji duże wsparcie dla OpenGL biblioteki wykrywania kolizji na licencjach OS C# łatwiejsze tworzenie GUI oraz łatwiejsza implementacja niektórych modułów (np. TCP) brak oficjalnego wsparcia dla OpenGL, jest za to Direct3D
 brak oficjalnego wsparcia dla OpenGL, jest za to Direct3D.")
10
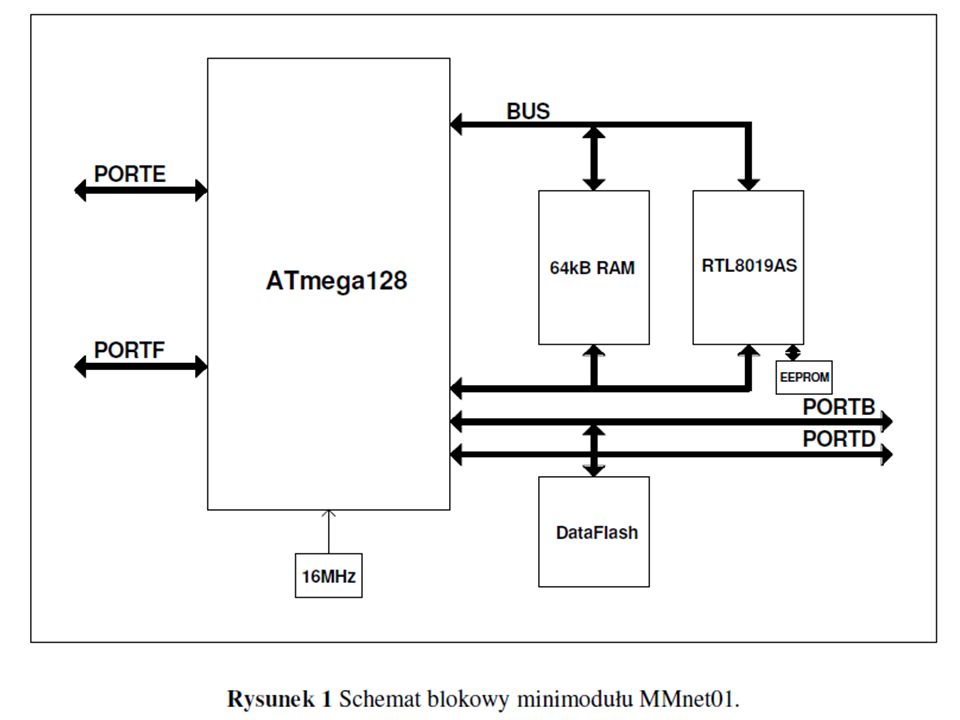
HARDWARE Minimoduł ethernetowy MMnet01

12
HARDWARE MMnet01 - Szybki mikrokontroler RISC ATmega128 o wydajności do 16MIPS - Kontroler ethernetu IEEE 802.3 10/100Mb/s LAN91C111 - 128kB programowanej w systemie pamięci programu typu FLASH - 64KB pamięci RAM - 4kB pamięci EEPROM - Elastyczny kontroler pamięci, pozwala dostosować przestrzeń adresową do potrzeb aplikacji - Zegar czasu rzeczywistego I2C oraz podstawka na baterię litową - Niezawodny układ Resetu - X w nazwie produktu oznacza rezonator kwarcowy, domyślnie 16 MHz - Rezonatory 32.768 Hz dla RTC oraz wewnętrznego timera/licznika procesora - 4 diody LED sygnalizujące: zasilanie, aktywność LAN, aktywność DataFlash - W pełni SMD wykonany na obwodzie czterowarstwowym - 2x32 wyprowadzenia z rastrem 0.1" (2.54mm) pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm
 pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm")
13
HARDWARE MMnet01 - Szybki mikrokontroler RISC ATmega128 o wydajności do 16MIPS - Kontroler ethernetu IEEE 802.3 10/100Mb/s LAN91C111 - 128kB programowanej w systemie pamięci programu typu FLASH - 64KB pamięci RAM - 4kB pamięci EEPROM - Elastyczny kontroler pamięci, pozwala dostosować przestrzeń adresową do potrzeb aplikacji - Zegar czasu rzeczywistego I2C oraz podstawka na baterię litową - Niezawodny układ Resetu - X w nazwie produktu oznacza rezonator kwarcowy, domyślnie 16 MHz - Rezonatory 32.768 Hz dla RTC oraz wewnętrznego timera/licznika procesora - 4 diody LED sygnalizujące: zasilanie, aktywność LAN, aktywność DataFlash - W pełni SMD wykonany na obwodzie czterowarstwowym - 2x32 wyprowadzenia z rastrem 0.1" (2.54mm) pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm jest i działa
 pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm jest i działa")
14
O RYZYKU W PROJEKCIE

15
ŚMIERĆ UCZESTNIKÓW TU TRZEBA DOPISAĆ RESZTE

16
DZIĘKUJEMY ZA UWAGĘ

Podobne prezentacje


 rejestr adresowy.>")




 najważniejsza płyta drukowana urządzenia elektronicznego, na której zamontowano najważniejsze elementy urządzenia,>")











