Pobierz prezentację
1
Zastosowania teorii grafów w socjologii i psychologii

2
Ludzie i obiekty- reprezentowani przez punkty, a związki między
ludźmi i obiektami- przez linie łączące te punkty. Linie ciągłe- relacje pozytywne, linie przerywane- negatywne. Grafy składają się ze zbioru obiektów i jednej lub więcej relacji, które mogą występować między niektórymi uporządkowanymi parami tych obiektów. Fakt, że między uporządkowaną parą punktów a i b zachodzi relacja Ri oznaczamy a Ri b.

3
Graf, którego relacje są symetryczne nazywamy grafem
nieskierowanym. Grafy można podzielić na nieoznaczone (jeden typ relacji) i oznaczone (dwie lub więcej relacji). Najczęściej spotykane są grafy z dwoma typami relacji: pozytywną R+ i negatywną R-. Typy grafów: 1. Nieskierowany graf nieoznaczony. Przykład: kierownik a prowadzi przez wewnętrzną sieć biura rozmowy z trzema podwładnymi b,c,d
 i oznaczone (dwie lub więcej relacji). Najczęściej spotykane są grafy z dwoma typami relacji: pozytywną R+ i negatywną R-. Typy grafów: 1. Nieskierowany graf nieoznaczony. Przykład: kierownik a prowadzi przez wewnętrzną sieć biura. rozmowy z trzema podwładnymi b,c,d.")
4
2. Nieskierowany graf oznaczony
Przykład: pan P i jego żona Ż goszczą przyjaciela p i przyjaciółkę f. Żona chce posadzić przy stole osoby tak, aby: sama nie siedziała obok męża; obok siebie nie siedziały osoby tej samej płci Ciekawostka: skonstruowany został graf rozmieszczenia gości mimo, że praktyczna realizacja jest niemożliwa.

5
3. Skierowany graf nieoznaczony.
Hierarchia kierownictwa w urzędach, organizacjach przemysłowych itp. 4. Skierowany graf oznaczony. Maruyama (1963) rozważał badanie systemów ze względu na to, czy proces a nasila czy hamuje proces b, czy też nie wpływa bezpośrednio na ten proces.
 rozważał badanie systemów ze względu na to, czy proces a nasila czy hamuje proces b, czy też nie wpływa. bezpośrednio na ten proces.")
6
System procesów instalowania urządzeń sanitarnych
i oczyszczania miasta: P R+ M, M R+ C, C R+ P – dodatnie sprzężenie zwrotne P R+ G, G R+ B, B R+ D, D R- P – ujemne sprzężenie zwrotne

7
Sprzężenie zwrotne dodatnie: w sytuacji zakłócenia jakiegoś
parametru w układzie układ dąży do zmiany wartości parametru kierunku zgodnym z kierunkiem, w którym nastąpiło odchylenie od zadanej wartości- powoduje ono zatem wzrost odchylenia danej wartości. Sprzężenie zwrotne ujemne: stanowi mechanizm samoregulacyjny, ma za zadanie utrzymanie jakiegoś parametru na zadanym poziomie. Zachodzi wtedy, gdy zaburzenia powodujące odchylenie wartości parametru w jakąś stronę powodują działania prowadzące do zmiany parametru w stronę przeciwną. Twierdzenie 1 Cykl reprezentuje sprzężenie zwrotne dodatnie wtedy i tylko wtedy, gdy zawiera parzystą liczbę łuków należących do relacji R- (licząc zero jako liczbę parzystą) i ujemne wtedy i tylko wtedy, gdy zawiera nieparzystą liczbę łuków należących do R- .
 i ujemne wtedy i tylko. wtedy, gdy zawiera nieparzystą liczbę łuków należących do R- .")
8
Naukowcy zajmują się raczej ujemnym sprzężeniem zwrotnym-
jednak Maruyama twierdzi, że w interakcjach społecznych i psychice indywidualnego człowieka wystepuje wiele systemów z dodatnim sprzężeniem zwrotnym. Przykłady:

10
Twierdzenie o równowadze i strukturze.
Rozważmy nieskierowany skończony graf oznaczony. Mówimy, że między punktami x i y przebiega tor , jeśli istnieje ciąg krawędzi zaczynających się w x i prowadzących do y. Krawędzie toru mogą być zarówno dodatnie jak i ujemne. Mówimy, że znak toru jest dodatni, jeśli tor zawiera parzystą ilość krawędzi ujemnych. Jeśli tor zaczyna się i kończy w tym samym punkcie, mamy do czynienia z cyklem. Grafy, w których każdy cykl ma znak dodatni są to grafy zrównoważone.

11
Twierdzenie 2 Skończony nieskierowany graf oznaczony jest
zrównoważony wtedy i tylko wtedy, gdy wszystkie tory łączące tą samą parę punktów mają ten sam znak. Twierdzenie 3 (strukturalne) Skończony nieskierowany graf oznaczony jest zrównoważony wtedy i tylko wtedy, gdy zbiór jego punktów można podzielić na dwa rozłączne podzbiory, w których każda dodatnia krawędź łączy dwa punkty tego samego podzbioru, a każda ujemna łączy dwa punkty należące do różnych podzbiorów.
 Skończony nieskierowany graf. oznaczony jest zrównoważony wtedy i tylko wtedy, gdy zbiór. jego punktów można podzielić na dwa rozłączne podzbiory, w których każda dodatnia krawędź łączy dwa punkty tego samego. podzbioru, a każda ujemna łączy dwa punkty należące do różnych. podzbiorów.")
12
Zastosowania: wszędzie tam, gdzie znakowi cyklu w skończonym
nieskierowanym grafie oznaczonym można nadać znaczenie empiryczne. Przykład: rozważmy grupę przedsiębiorstw- pewne współpracują, inne konkurują ze sobą, inne nie współpracują, ani nie konkurują. Jeśli w grafie jest cykl ujemny, to przedsiębiorstwa konkurują i współpracują w sposób, który może przynieść im szkodę. Można takiej sytuacji uniknąć, jeśli podzielimy przedsiębiorstwa na dwie rozłączne grupy tak, że konkurencja zachodzi tylko między przedsiębiorstwami z różnych grup.

13
Twierdzenie o skończonych skierowanych grafach
nieoznaczonych. Mówimy, że tor przebiega między punktami a i b grafu skierowanego, jeśli istnieje ciąg łuków zaczynający się w a i kończący w b. Mówimy, że graf jest jednostronnie spójny, jeśli dla każdych dwóch punktów a, b istnieje tor od a do b lub od b do a. Mówimy, że graf posiada linię Hamiltona, jeśli istnieje tor, który przechodzi przez każdy punkt grafu dokładnie raz. Twierdzenie 4. Skończony graf skierowany jest jednostronnie spójny wtedy i tylko wtedy, gdy zawiera linię Hamiltona.

14
Jedną z realizacji tego twierdzenia jest schemat obiegu plotki.
W grafie skierowanym xRy wtedy i tylko wtedy, gdy x przekazuje plotkę do y. Oczywiste jest, że y odbierze plotkę od x wtedy i tylko wtedy, gdy istnieje tor od x do y. Realizacja twierdzenia polega na spełnieniu dwóch następujących warunków: Dla dowolnej pary osób w schemacie obiegu przynajmniej jedna z tych osób może nadać plotkę, którą odbiera druga osoba (tzn. graf reprezentujący schemat jest grafem jednostronnym). 2. Przynajmniej jedna z osób nadających plotkę może porozumieć się z wszystkimi pozostałymi mimo, że każda z nich przekazuje plotkę do jednej osoby (taka osoba reprezentowana jest przez pierwszy punkt linii Hamiltona).
. 2. Przynajmniej jedna z osób nadających plotkę może porozumieć się. z wszystkimi pozostałymi mimo, że każda z nich przekazuje plotkę. do jednej osoby (taka osoba reprezentowana jest przez pierwszy punkt. linii Hamiltona).")
15
Prace empiryczne z zastosowaniem teorii grafów.
Heider (1946) sugerował, że ludzie mają skłonność do postrzegania, że postawy innych wobec różnych zjawisk społecznych są podobne do ich własnych postaw i nie lubią mieć oni postaw przeciwnych. Cartwright i Harary (1956) pokazali, w jaki sposób tendencję tą można realizować jako tendencję do takiego postrzegania stosunków społecznych, żeby graf reprezentujący te stosunki był zrównoważony.
 sugerował, że ludzie mają skłonność do postrzegania, że postawy innych wobec różnych zjawisk społecznych są podobne. do ich własnych postaw i nie lubią mieć oni postaw przeciwnych. Cartwright i Harary (1956) pokazali, w jaki sposób tendencję tą. można realizować jako tendencję do takiego postrzegania. stosunków społecznych, żeby graf reprezentujący te stosunki był. zrównoważony.")
18
Prace eksperymentalne nad równowagą skupiają się głównie na
równowadze między dwoma osobami i jednym obiektem. Stwierdzono, że kiedy osobom badanym podaje się informacje o znakach dla wszystkich z wyjątkiem jednego stosunków między osobami o obiektami i prosi się o zgadnięcie tego jednego znaku, to badani mają tendencje do podawania znaku, który doprowadza do równowagi (Morisette, 1958). Ludzie mają tendencje do oceniania stosunków będących w równowadze jako bardziej przyjemnych niż stosunki niezrównoważone; Badani łatwiej uczyli się sytuacji społecznie zrównoważonych niż niezrównoważonych.
. Ludzie mają tendencje do oceniania stosunków będących. w równowadze jako bardziej przyjemnych niż stosunki. niezrównoważone; Badani łatwiej uczyli się sytuacji społecznie zrównoważonych. niż niezrównoważonych.")
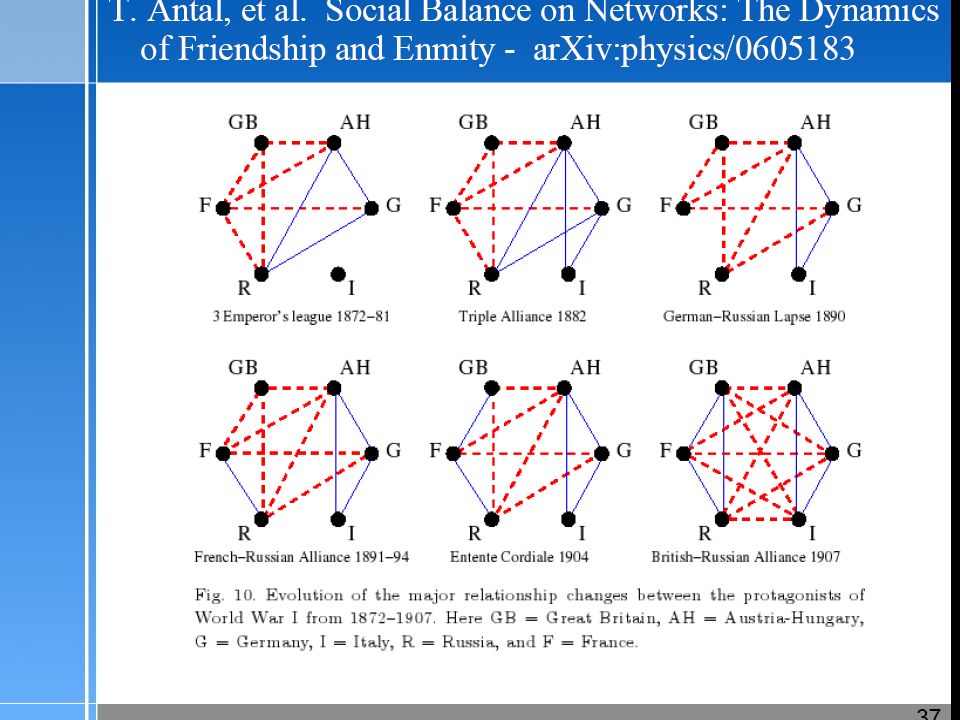
19
Równowaga społeczna- dynamika przyjaźni i wrogości (Antal,
Krapivsky, Redner, 2006) Jak można „wyeliminować” niezrównoważone trójki (trójki zawierające jedną albo trzy „nieprzyjazne” linie)? Cel- zmiana niezrównoważonych trójek na zrównoważone: - można zmieniać linie „nieprzyjazne” w „przyjazne” i odwrotnie; można zmienić sieć reprezentowana przez taką trójkę tak, że przechodzi ona ze stanu „realnego” w stan „utopii” (wszystkie linie przyjazne) Jak wiadomo, „przyjaźń” i „wrogość” mogą ulegać zmianie. Rozważmy sytuację, gdy dana osoba musi ustalić relacje z dwoma osobami z pary, która się rozwiodła.
 Jak można „wyeliminować niezrównoważone trójki (trójki. zawierające jedną albo trzy „nieprzyjazne linie) Cel- zmiana niezrównoważonych trójek na zrównoważone: - można zmieniać linie „nieprzyjazne w „przyjazne i odwrotnie; można zmienić sieć reprezentowana przez taką trójkę tak, że. przechodzi ona ze stanu „realnego w stan „utopii (wszystkie. linie przyjazne) Jak wiadomo, „przyjaźń i „wrogość mogą ulegać zmianie. Rozważmy sytuację, gdy dana osoba musi ustalić relacje z dwoma. osobami z pary, która się rozwiodła.")
20
Utrzymywanie dobrych relacji z obydwojgiem prowadzi do
nierównowagi- aby utrzymać równowagę należałoby zerwać stosunki z jedną z osób. Ogólniej: sieć jest w równowadze, jeśli każdy cykl jest w równowadze. Cartwright i Harary: jeśli w grafie pełnym znajdziemy niezrównoważony cykl dowolnej długości, to musi istnieć niezrównoważona trójka (definicje „cyklowa” i „trójkowa” są równoważne.)
")
21
Harary i Cartwright pokazali, że w grafie pełnym równowaga jest
prosta: albo wszyscy się ze sobą przyjaźnią (utopia) albo sieć można podzielić na dwie antagonistyczne, ale „wewnętrznie przyjazne” grupy. Jednak „spontaniczna równowaga” występuje rzadko (chociaż się zdarza- patrz przykład).
 albo sieć. można podzielić na dwie antagonistyczne, ale „wewnętrznie. przyjazne grupy. Jednak „spontaniczna równowaga występuje rzadko (chociaż się. zdarza- patrz przykład).")
23
Zdefiniujmy trójkę jako będacą typu k, jeśli zawiera
k „nieprzyjazne” linie. Czyli 0, 2 są w równowadze, a 1, 3 nie są. Postępujemy w następujący sposób: A. „Dynamika lokalna” (local triad dynamics): Bierzemy dowolną trójkę- jeśli jest w równowadze, to nic nie robimy; 2. Jeśli jest to trójka typu 1, to a) z prawdopodobieństwem p zmieniamy linię nieprzyjazną na przyjazną; b) z prawd. 1-p zmieniamy linię nieprzyjazną na przyjazną; 3. Jeśli jest to trójka typu 3, to zmieniamy linię nieprzyjazną na przyjazną.
: Bierzemy dowolną trójkę- jeśli jest w równowadze, to. nic nie robimy; 2. Jeśli jest to trójka typu 1, to a) z prawdopodobieństwem p. zmieniamy linię nieprzyjazną na przyjazną; b) z prawd. 1-p. zmieniamy linię nieprzyjazną na przyjazną; 3. Jeśli jest to trójka typu 3, to zmieniamy linię nieprzyjazną. na przyjazną.")
24
Trzeba pamiętać, że doprowadzenie do równowagi jednej trójki
może „zaburzyć” inną. B. Dynamika „wymuszona” (constrained triad dynamics): Najpierw wybiera się losowo niezrównoważoną trójkę, a potem losowo linię w trójce. Zmieniamy znak linii tylko wtedy, gdy całkowita liczba niezrównoważonych trójek maleje. Wyniki 1. Dla „local triad dynamics” skończona sieć zmierza do równowagi w czasie zależnym od p; 2. Dla nieskończonej sieci równowaga nie jest nigdy osiągnięta jeśli p<0.5; 3. Dla p 0.5 osiągnięta zostaje utopia; 4. Dla „constrained triad dynamics” dowolna sieć szybko zmierza do równowagi.
: Najpierw wybiera się losowo niezrównoważoną trójkę, a potem losowo linię w trójce. Zmieniamy znak linii tylko. wtedy, gdy całkowita liczba niezrównoważonych trójek maleje. Wyniki. 1. Dla „local triad dynamics skończona sieć zmierza do równowagi. w czasie zależnym od p; 2. Dla nieskończonej sieci równowaga nie jest nigdy osiągnięta jeśli. p<0.5; 3. Dla p 0.5 osiągnięta zostaje utopia; 4. Dla „constrained triad dynamics dowolna sieć szybko zmierza. do równowagi.")
25
Literatura: Coombs, Dawes, Tversky „Wprowadzenie do psychologii Matematycznej 2. Przemysław Gawroński „Równowaga Heidera- symulacje mitozy społecznej” 3. Social balance on networks: The dynamics of friendship and enmity T. Antal, P.L. Krapivsky and S. Redner








 < IR(G)>")








, kierunek i zwrot. Wartością wektora nazywamy długość odcinka AB przedstawiającego ten wektor.>")





