Pobierz prezentację

1
Metody numeryczne wykład no 2

2
Dana jest macierz A i przedstawiamy ją w postaci:
Rozkład LU. Metoda Croute’a. Rozkład na macierze trójkątne Dana jest macierz A i przedstawiamy ją w postaci: A=LU gdzie macierz L jest macierzą dolną trójkątną:

3
lub ogólnie: Macierz U górna trójkątna: lub ogólnie:

4
Jeżeli A=LU, to dla układu równań AX=b mamy:
Rozwiązanie układu LY=b z dolną macierzą trójkątną jest łatwe: i=2,3,...,N

5
i rozwiązanie równania UX=Y z górną macierzą trójkątną
jest łatwe: i=N-1,N-2,...,1 Duża zaleta: Znając rozkład LU możemy go wykorzystać wielokrotnie dla różnych prawych stron.

6
Obliczanie wyrazów macierzy L i U
w wyniku mnożenia obu macierzy mamy macierz B=[bij] Zaczynamy kolejno: pierwszy wiersz macierzy L razy k-ta kolumna macierzy U: k-ty wiersz macierzy L razy pierwszy wiersz macierzy U:

7
k-ty wiersz macierzy L razy j-ta (jk) kolumna macierzy U:
j-ty wiersz (j>k) macierzy L razy k-ta kolumna macierzy U:
 macierzy L razy k-ta kolumna macierzy U:")
8
ponieważ musi zachodzić B=A, czyli bij=aij dla (i,j=1,2,...,N)
stąd otrzymujemy kolejno: Pierwszy wiersz macierzy U: pierwsza kolumna macierzy L: k-ty wiersz macierzy U: dla j=k,k+1,...,N k-ta kolumna macierz L: dla j=k+1,k+2,...,N

9
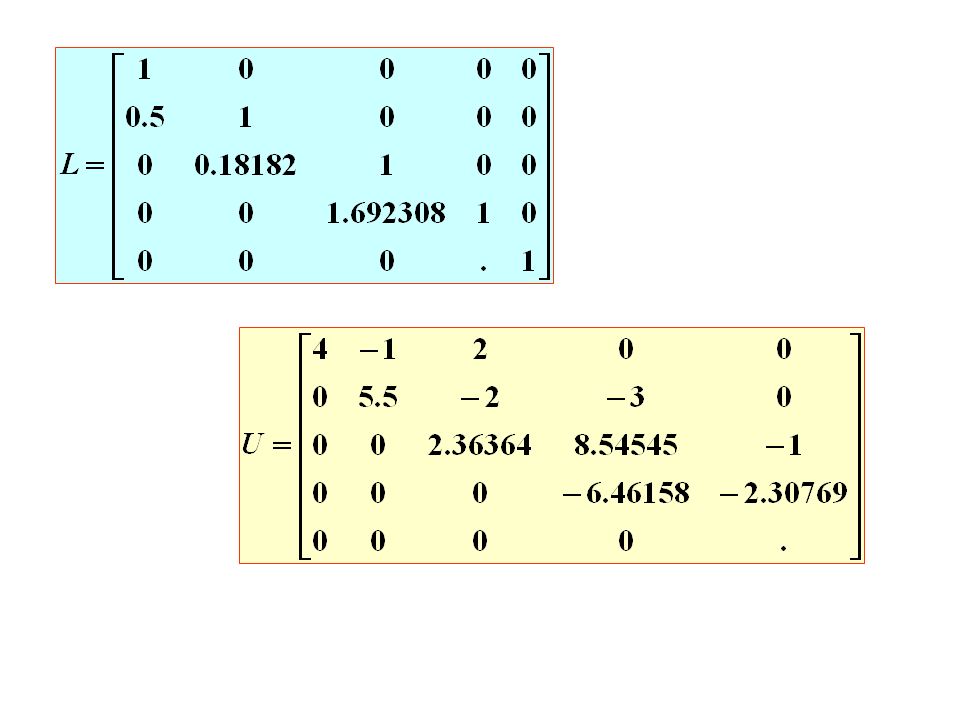
Przykład: Zgodnie z: pierwszy wiersz macierzy U:

10
Pierwsza kolumna macierzy L zgodnie z
gdzie u11=4

11
drugi wiersz macierzy U zgodnie ze wzorem:
j=2,3,4,5

12
Druga kolumna macierzy L:
j=3,4,5

13
trzeci wiersz macierzy U zgodnie ze wzorem:
j=3,4,5

14
trzecia kolumna macierzy L:
j=4,5

15
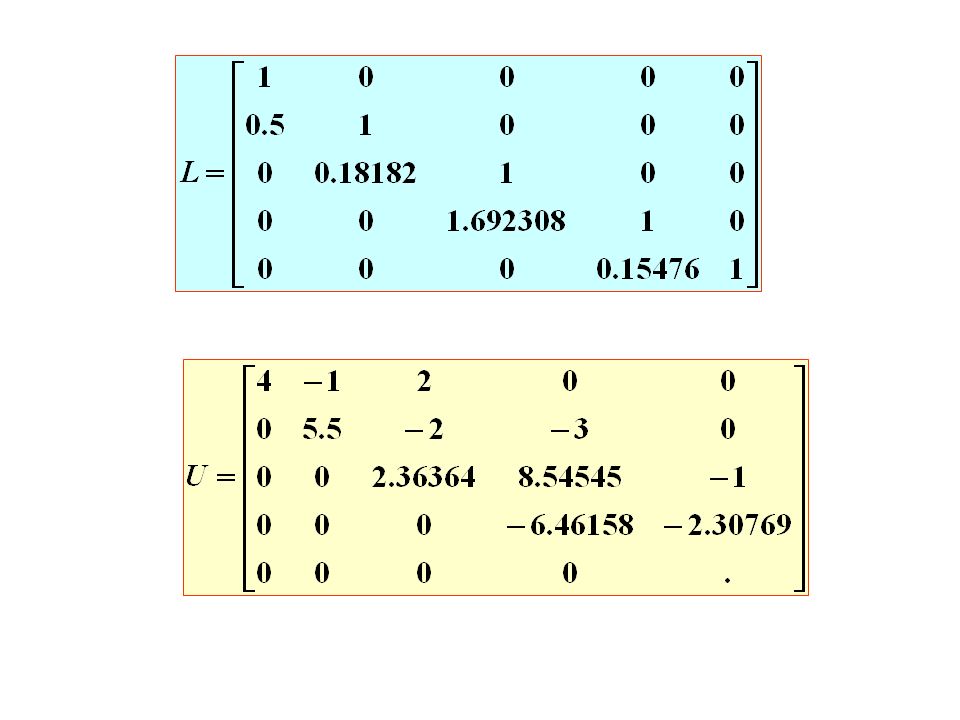
czwarty wiersz macierzy U zgodnie ze wzorem:
j=4,5

17
czwarta kolumna macierzy L:
j=5

19
i ostatecznie u55 z zależności:

21
Dla sprawdzenia czy nie popełniliśmy błędu obliczamy: B=LU

22
Mając macierz A=LU możemy rozwiązać równanie LUX=b
dla dowolnego wektora prawej strony.

23
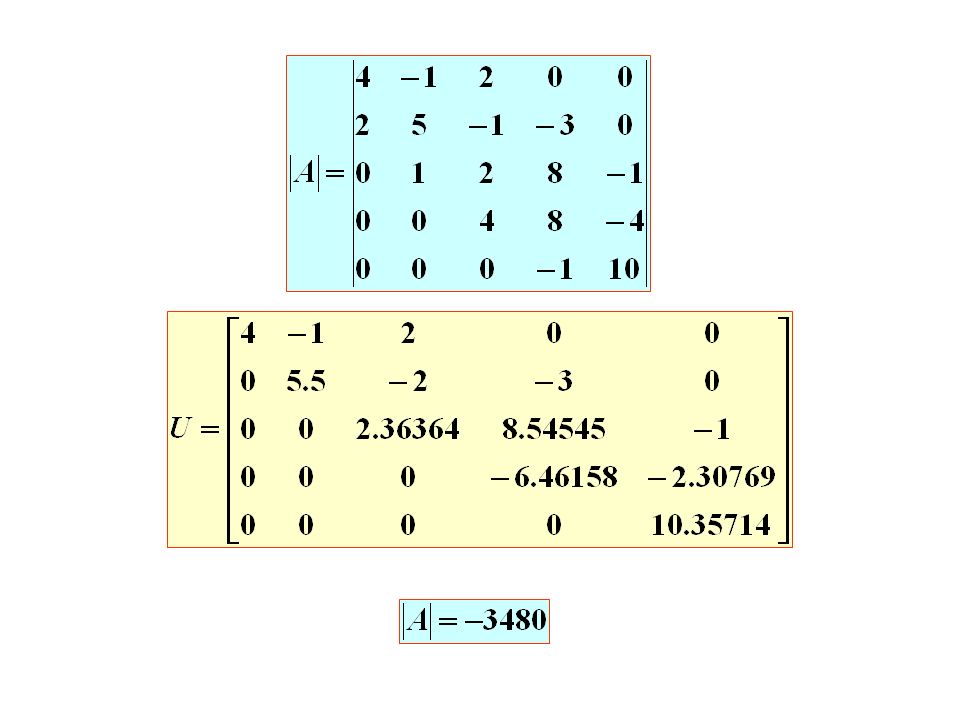
Znając rozkład LU macierzy łatwo obliczyć wyznacznik
główny |A| macierzy A=LU. Mamy: ale a i ostatecznie:

25
Obliczanie macierzy odwrotnej
Macierz odwrotna : AA-1=1 i A-1A=1 Oznaczając: X=A-1 mamy N układów N równań liniowych: AX=1 Metoda Gaussa - Jordana Dana macierz:

26
Dla określenia macierzy odwrotnej X mamy równanie:

27
Zapisujemy w postaci tablicy uzupełnionej:
i procedura eliminacji Gaussa – Jordana:

28
Ponieważ pierwsze dwie kolumny już nie ulegną zmianie
dlatego ze względu na oszczędność miejsca zostaną usunięte

29
Pomijamy pierwszą kolumnę

30
Pomijamy pierwszą kolumnę:

31
i otrzymujemy macierz odwrotną:

32
Sprawdzamy poprawność obliczonej macierzy odwrotnej
obliczając AA-1

33
Macierz odwrotną można również obliczyć korzystając z
rozkładu LU Niech A=LU mamy rozwiązać N układów N równań algebraicznych: LUX=1 oznaczając: mamy: LY=1 Y=UX

34
Postępowanie jest proste:
Krok pierwszy – rozwiązujemy N - krotnie układ N równań z dolną macierzą trójkątną L wyznaczając Y: LY=1 Krok drugi – rozwiązujemy N – krotnie układ N równań z górną macierzą trójkątną U wyznaczając macierz odwrotną A-1=X: UX=Y

35
Dana macierz: i

36
Równanie LY=1 jest

37
Macierz odwrotna do dolnej trójkątnej też jest macierzą dolną
trójkątną i w przypadku macierzy L główna przekątna to 1 czyli

38
Pozostałe wyrazy macierzy Y wyznaczamy rozpoczynając
od pierwszej kolumny i kolejno następne: Pozostaje do rozwiązania równanie: UX=Y

39
Startujemy kolejno od pierwszej kolumny kolejno do piątej,
a niewiadome w kolumnach wyznaczamy od ostatniej tj. xNk

40
Dla porównania macierz odwrotna obliczona metodą Gaussa - Jordana

41
Interpolacja funkcji Dane wartości funkcji yn w punktach xn, gdzie n=0,1,2, ....N-1. y yn y0 yN-1 x x0 xn xN-1

42
Interpolacja wielomianowa
Twierdzenie Istnieje dokładnie jeden wielomian stopnia co najwyżej N (N>=0), który w punktach x0, x1,...,xN-1 przyjmuje wartości y0,y1,...,yN-1. Wzór interpolacyjny Lagrange'a: gdzie jest wielomianem stopnia co najwyżej N.
, który w punktach x0, x1,...,xN-1 przyjmuje wartości y0,y1,...,yN-1. Wzór interpolacyjny Lagrange a: gdzie. jest wielomianem stopnia co najwyżej N.")
43
Z warunku interpolacyjnego:
powyższy układ N równań można najprościej rozwiązać przyjmując dla wielomianów k(x) następujące warunki : jako wielomian k(x) należy wybrać taki, który ma miejsca zerowe we wszystkich punktach interpolacji z wyjątkiem punktu xk , w którym funkcja ma wartość 1 Rozwiązaniem jest wielomian :
 następujące warunki : jako wielomian k(x) należy wybrać taki, który ma miejsca. zerowe we wszystkich punktach interpolacji. z wyjątkiem punktu xk , w którym funkcja ma wartość 1. Rozwiązaniem jest wielomian :")
44
Rozwiązaniem jest wielomian:
z warunku: otrzymuje się: Wielomian Lagrange'a przyjmuje postać: Ocena błędu interpolacji:

45
Ocena błędu interpolacji:
Przykład 1. Zbudować wielomian interpolacyjny dla funkcji exp(x) w przedziale [1,2] bazując na 5 węzłach interpolacyjnych. Wybierzmy węzły równomiernie czyli
 w przedziale [1,2] bazując na 5 węzłach interpolacyjnych. Wybierzmy węzły równomiernie czyli.")
46
mamy: xi 1.0 1.25 1.50 1.75 2.0 yi 5.7546 Wielomian Lagrange’a jest:

47
lub Wyniki obliczeń przedstawiono na wykresie:

48
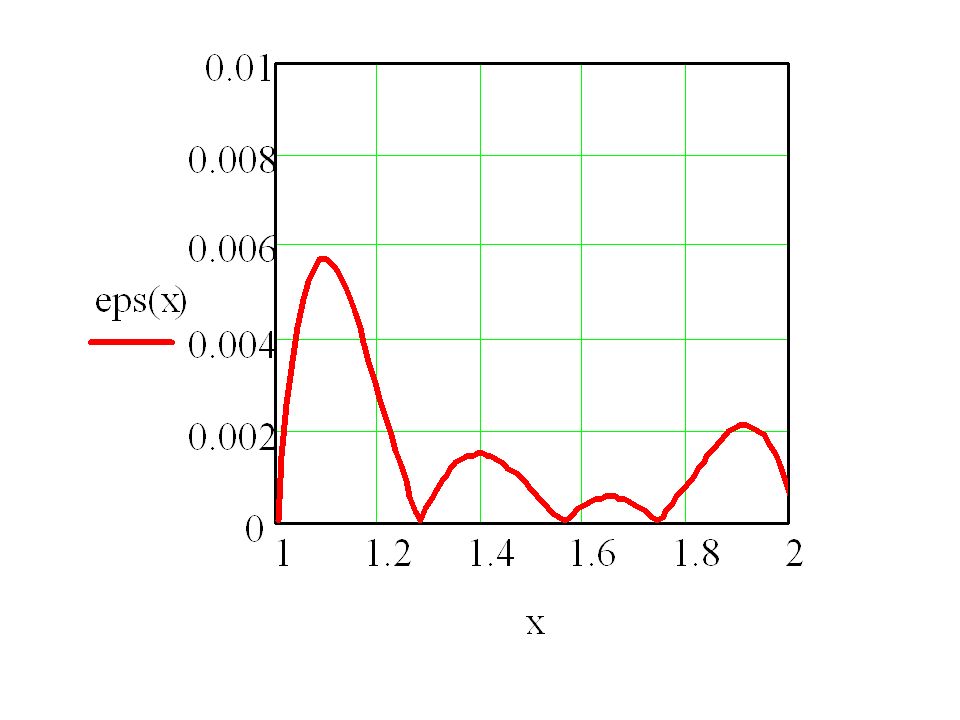
Dla lepszej oceny wykres błędu względnego:

50
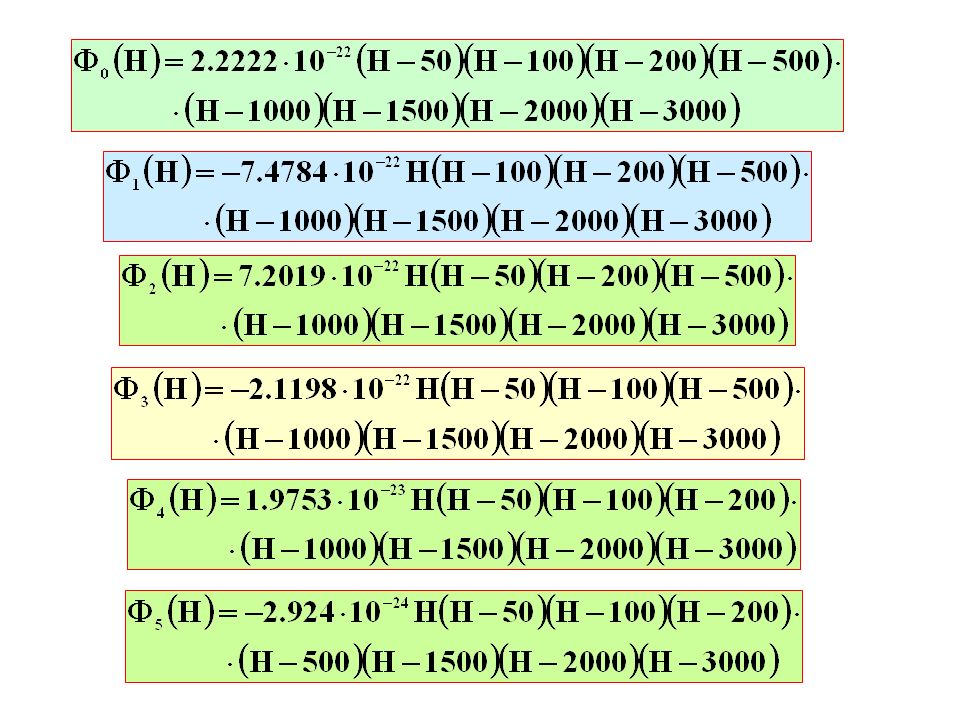
Przykład 2. W wyniku pomiarów zdjęto pierwotną krzywą magnesowania B=F(H). Zbudować wielomian interpolacyjny Lagrange'a dla zakresu 0<=H <=3000A/m. H[A/m] 50 100 200 500 1000 1500 2000 3000 B[T] 0.75 1.5 1.8 1.95 2.0 2.02 2.03 2.035 Kolejne wielomiany k(H) dla k=0,1,...8 są: lub po obliczeniu mianownika mamy:
 dla k=0,1,...8 są: lub po obliczeniu mianownika mamy:")
52
i wielomian aproksymacyjny jest
lub

53
Otrzymany wynik jest niemożliwy do przyjęcia!!!

54
Aproksymacja liniowa odcinkami:
H[A/m] 50 100 200 500 1000 1500 2000 3000 B[T] 0.75 1.5 1.8 1.95 2.0 2.02 2.03 2.035 dla lub po wykonaniu działań: dla i podobnie: dla dla dla

55
dla dla dla dla

56
B(H)
")
57
Porównanie Ba(H) – interpolacja liniowa
B(H) – wielomian 8-go stopnia
 – wielomian 8-go stopnia.")