Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

2
Kontakt do działu wsparcia technicznego
Siedziba główna, Warszawa Pomoc techniczna wew. 1 Serwis wew. 5

3
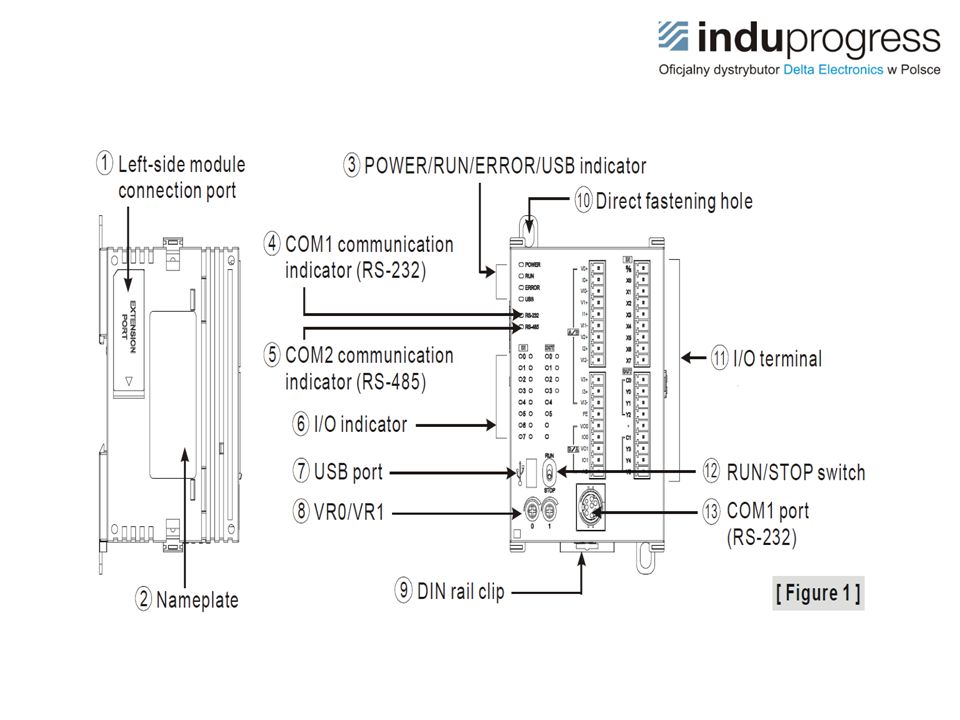
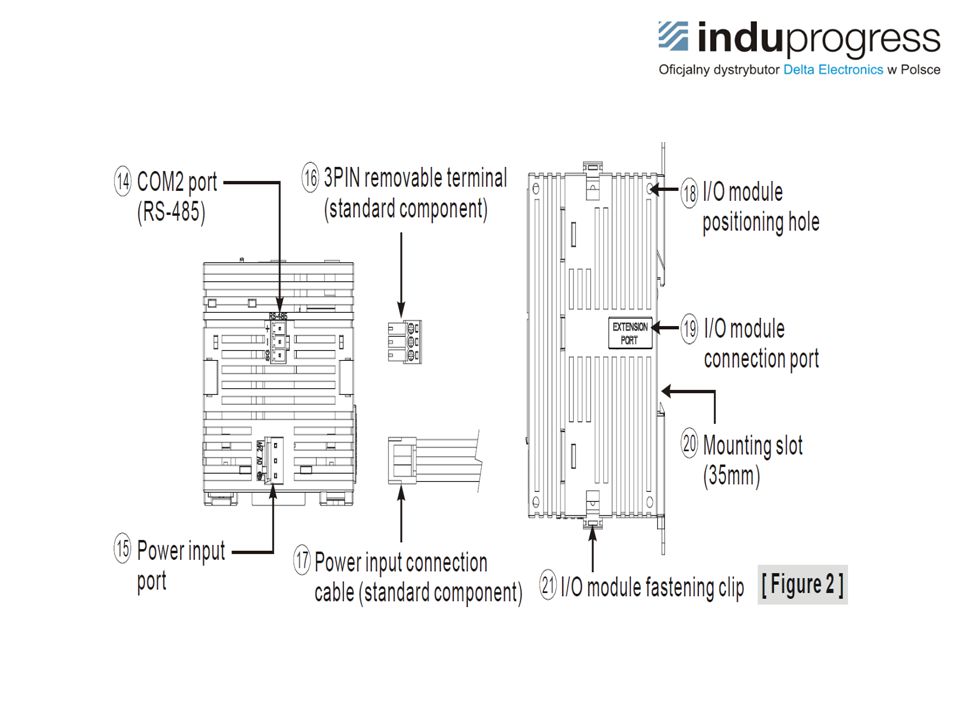
Sterowniki SLIM DVP-SS2 DVP-SA2
sterowniki serii SLIM - niewielkie gabaryty wbudowane wejścia i wyjścia binarne obsługa do 256 wejść i 256 wyjść wbudowane przetworniki AD i DA (0…10V, 4…20mA) wbudowane porty komunikacyjne RS232 / 422 / 485 czas wykonania instrukcji od 0,35µs do 1µs 2,85 miliona instrukcji na sekundę możliwość dołączania modułów rozszerzeń binarne analogowe komunikacyjne specjalistyczne DVP-SA2
 wbudowane porty komunikacyjne RS232 / 422 / 485. czas wykonania instrukcji od 0,35µs do 1µs. 2,85 miliona instrukcji na sekundę. możliwość dołączania modułów rozszerzeń. binarne. analogowe. komunikacyjne. specjalistyczne. DVP-SA2.")
4
Sterowniki SLIM DVP-SV2 DVP-SX2
pamięć programu kroków pamięć danych 16 bitowych rejestrów pamięć danych (podtrzymywana) rejestrów pamięć danych bitowych flag 500 flag specjalnego przeznaczenia 1000 rejestrów specjalnego przeznaczenia timer’y szt (1ms, 10ms, 100ms) liczniki 16 bitowe szt liczniki 32 bitowe - 55 szt sprzętowe liczniki - 22 szt Zegar Czasu Rzeczywistego DVP-SX2
 rejestrów. pamięć danych bitowych flag. 500 flag specjalnego przeznaczenia rejestrów specjalnego przeznaczenia. timer’y szt (1ms, 10ms, 100ms) liczniki 16 bitowe szt. liczniki 32 bitowe - 55 szt. sprzętowe liczniki - 22 szt. Zegar Czasu Rzeczywistego. DVP-SX2.")
5
Sterowniki SS2 Zabudowane wejścia/wyjścia: 14 (8DI/6DO)
Maksymalna liczba wejść/wyjść 480 Pamięć: k kroków; Rejestry 16bit: 5k słów Szybkość: 0,35 – 1us (podstawowe instrukcje) 3,4us (instrukcja MOV) Porty komunikacyjne: 1xRS-232 oraz 1xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a Szybkie wyjścia: 4 szybkie wyjścia 10kHz Szybkie wejścia: 8 szybkich wejść oraz przerwań od sygnałów wejściowych (4x20kHz lub x10kHz)
 3,4us (instrukcja MOV) Porty komunikacyjne: 1xRS-232 oraz 1xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a. Szybkie wyjścia: 4 szybkie wyjścia 10kHz. Szybkie wejścia: 8 szybkich wejść oraz przerwań od sygnałów wejściowych (4x20kHz lub 4x10kHz)")
6
Sterowniki SA2 Zabudowane wejścia/wyjścia: 12 (8DI/4DO)
Maksymalna liczba wejść/wyjść Pamięć: k kroków; Rejestry 16bit: 10k słów Szybkość: 0,35 – 1us (podstawowe instrukcje) 3,4us (instrukcja MOV) Porty komunikacyjne: 1xRS-232 oraz 2xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a Szybkie wyjścia: 4 szybkie wyjścia impulsowe (2x100kHz, 2x10kHz) Szybkie wejścia: 8 szybkich wejść oraz przerwań od sygnałów wejściowych (3x100kHz, x10kHz, 1xA/B fazowe do 50kHz)
 3,4us (instrukcja MOV) Porty komunikacyjne: 1xRS-232 oraz 2xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a. Szybkie wyjścia: 4 szybkie wyjścia impulsowe (2x100kHz, 2x10kHz) Szybkie wejścia: 8 szybkich wejść oraz przerwań od sygnałów wejściowych (3x100kHz, 5x10kHz, 1xA/B fazowe do 50kHz)")
7
Sterowniki SV2 Zabudowane wejścia/wyjścia: 28 (16DI/12DO)
Maksymalna liczba wejść/wyjść: 512 Pamięć: k kroków; rejestry 16bit: 12k słów Szybkość: x szybsze wykonywanie instrukcji niż sterowniki serii SV Porty komunikacyjne: 1xRS-232 oraz 1xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a Szybkie wyjścia: grupy szybkich wyjść impulsowych (4x200kHz) Szybkie wejścia: grupy sprzętowych szybkich liczników (do 200 kHz)
 Szybkie wejścia: 4 grupy sprzętowych szybkich liczników (do 200 kHz)")
8
Sterowniki SX2 Zabudowane wejścia/wyjścia: 20 (8DI/6DO, 4AI/2AO)
Maksymalna liczba wejść/wyjść Pamięć: k kroków; Rejestry 16bit: 10k słów Szybkość: 0,35 – 1us (podstawowe instrukcje) 3,4us (instrukcja MOV) Porty komunikacyjne: USB, 1xRS-232 oraz 1xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a Szybkie wyjścia: 4 szybkie wyjścia impulsowe (2x100kHz, 2x10kHz) Szybkie wejścia: 8 szybkich wejść oraz przerwań od sygnałów wejściowych (2x100kHz, x10kHz)
 3,4us (instrukcja MOV) Porty komunikacyjne: USB, 1xRS-232 oraz 1xRS-485 z obsługą protokołu Modus ASCII/RTU w funkcji master’a oraz slave’a. Szybkie wyjścia: 4 szybkie wyjścia impulsowe (2x100kHz, 2x10kHz) Szybkie wejścia: 8 szybkich wejść oraz przerwań od sygnałów wejściowych (2x100kHz, 6x10kHz)")
9
Moduły Moduły prawostronne - moduł wejść / wyjść - moduły analogowe - moduły temperaturowe Moduły lewostronne: - moduł sieci BACnet - moduł sieci Profibus - moduł wagowy - moduł Ethernetowy - moduł sieci CanOpen - moduł sieci DeviceNet - moduł RS 485/422 - moduły analogowe

12
Okablowanie wejść Wejścia typu Sink Wejścia typu Source

13
Okablowanie wyjść przekaźnikowych

14
Okablowanie wyjść tranzystorowych
Wyjścia typu NPN Wyjścia typu PNP

15
Komunikacja sterownika PLC z PC-tem
COMMGR jest interfejsem komunikacyjny pomiędzy oprogramowaniem ISPSoft a PLC.

16
Commgr typy połączenia
- Połączenie przez RS – typ RS 232/422/485 - Połączenie przez Mini-USB z sterownikiem SX2 – typ RS 232/422/485 - Połączenie przez Mini-USB z sterownikiem SE – typ USB (Virtual COM) - Połączenie przez Ethernet – typ Ethernet - Połączenie pośrednie przez panel HMI po USB – typ DirectLink (USB) - Połączenie pośrednie przez panel HMI po Ethernecie – typ DirectLink (Ethernet) - Symulator – typ DVP Simulator
 - Połączenie przez Ethernet – typ Ethernet. - Połączenie pośrednie przez panel HMI po USB – typ DirectLink (USB) - Połączenie pośrednie przez panel HMI po Ethernecie – typ DirectLink (Ethernet) - Symulator – typ DVP Simulator.")
17
COMMGR – ustawienie komunikacji

18
ISPSoft – ustawienie komunikacji

19
ISPSoft – menu Przesłanie lub wczytanie programu z PLC Dodanie cewki
Dodanie styku Tryb online Wyświetlenie komentarzy Dodanie nowej linii programu

20
ISPSoft – Project menu Device Comment List – lista komentarzy Used Device Report – raport na temat wykorzystanych wejść, wyjść, rejestrów ... Retentive Range - rejestry podtrzymywane bateryjnie Device Resource Allocation – zakres rejestrów które zostaną automatycznie przypisane do symboli Tasks kolejność wykonania programów Global Symbols - symbole globalne Programs - programy Device Monitor Table - monitorowanie rejestrów APIs - lista instrukcji

21
ISPSoft – Mapa pamięci X - zewnętrzne wejścia X0 – X3FF 256 punktów max Y - zewnętrzne wyjścia Y0 – Y3FF 256 punktów max M - markery generalnego przeznaczenia : M0 – M M768 – M999 M2000 –M2047 podtrzymywane bateryjnie : M512 - M M2048 – M4095 specjalne: M1000 – M1999 D - rejestry: generalnego przeznaczenia : D0 – D D600 – D D3920 – D9999 podtrzymywane bateryjnie : D408 – D D2000 – D3919 specjalne: D D1999

22
ISPSoft – Markery specjanego przeznaczenia
M1000 – styk normalnie zamknięty gdy sterownik PLC jest w RUN M styk normalnie otwarty gdy sterownik PLC jest w RUN M1002 – styk załączony tylko w pierwszym cyklu pracy sterownika M1012 – 100 ms zegar 50 ms ON / 50 ms OFF M1013 – 1 sekundowy zegar 0,5 sek ON / 0,5 sek OFF M1028 – przełącza rozdzielczość timerów T64 – T126 (10ms ON / 100 ms OFF) M1038 – przełącza rozdzielczość timerów T200 – T255 (1ms ON / 10ms OFF)
 M1038 – przełącza rozdzielczość timerów T200 – T255 (1ms ON / 10ms OFF)")
23
ISPSoft – Numeracja wejść i wyjść w modułach
CPU PLC X0 X10 … … X7 X17 Y0 Y10 … … Y7 Y17 Wej/ Wyj X X27 Y20 … Y27 Wyj Y30 … Y37 Wej/ Wyj X X37 Y40 … Y47 Jednostki centralne PLC mają zawsze zarezerwowane adresy wejść: X0 - X7 i X10 – X17 wyjść: Y0 – Y7 i Y10 – Y17

24
ISPSoft – Podstawowe instrukcje cz.1
Ld – styk normalnie otwarty Ldi - styk normalnie zamknięty Ldp - styk reagujący na zbocze narastające Ldf - styk reagujący na zbocze opadające And - styk normalnie otwarty połączony szeregowo Ani - styk normalnie zamknięty połączony szeregowo Or - styk normalnie otwarty połączony równolegle Ori - styk normalnie zamknięty połączony równolegle

25
ISPSoft – Podstawowe instrukcje cz.2
Out – cewka wyjściowa Set - cewka zatrzaskująca status ON Rst - cewka zatrzaskująca status OFF

26
ISPSoft – Podstawowe instrukcje cz.3
Mov - przepisanie wartości Add - dodanie 2 wartości Sub - odjęcie 2 wartości Mul - mnożenie 2 wartości Div - dzielenie 2 wartości Inc - zwiększenie o 1 wartości w rejestrze Dec - zmniejszenie o 1 wartości w rejestrze

27
ISPSoft – Timery TMR – instrukcja timera S1 – numer Timera S2 – czas jaki będzie odliczany przez Timer

28
ISPSoft – Liczniki CNT – instrukcja licznika S1 – numer licznika S2 – górny limit

29
ISPSoft – Szybkie liczniki softwarowe

30
ISPSoft – Szybkie liczniki hardwerowe

31
ISPSoft – Instrukcja SCLP - skalowanie

32
ISPSoft – Instrukcja TO – Zapis danej do modułu specjalnego (np
ISPSoft – Instrukcja TO – Zapis danej do modułu specjalnego (np. analogowego, temperaturowego )
")
33
ISPSoft – Instrukcja FROM – Odczyt rejestru z modułu specjalnego (np
ISPSoft – Instrukcja FROM – Odczyt rejestru z modułu specjalnego (np. analogowego, temperatury )
")
34
ISPSoft – Instrukcja DDRVI – sterowanie pozycją serwa
Jazda na pozycję względną

35
ISPSoft – Instrukcja DDRVI – sterowanie pozycją serwa
Jazda na pozycję absolutną

36
RS485 RTU 485 RS485

37
Panele HMI

38
DOPSoft – ustawienie nowego projektu
Aby utworzyć nowy projekt należy wejść w [File] → [New]. Następnie wybrać odpowiedni model panelu i nacisnąć [Finish]

39
DOPSoft – menu cz.1 Przyciski Suwak Wykres słupkowy Klawiatury Lampki
Alarmy Wyświetlenie rejestru Wejście numeryczne

40
DOPSoft – menu cz. 2 Symulacja Podgląd stanu dla 0
Załadowanie ekranu do panelu HMI Podgląd stanu dla 1 Załadowanie ekranu i receptur do panelu HMI Kompilacja

41
DOPSoft – ustawienie komunikacji
W celu ustawienia komunikacji należy wejść w [Options] → [Communication Settings]. Domyślne ustawienia komunikacji RS 485 dla sterownika PLC to 9600 Baund Rate i 7, E, 1

42
DOPSoft – Komuniacja z HMI
W celu wybrania portu po jakim będziemy się komunikować z panelu HMI należy wejść w [Option] → [Environment] W celu uzyskania najprostszego dostępu do sieci należy ustawić tą samą podsieć w PC co w HMI

43
DOPSoft – ustawienia cz. 1
W celu ustawienia komunikacji należy wejść w [Options] → [Configuration]. W zakładce [Main] → [Security] możemy ustawić hasło dla projektu. Domyślne hasło to

44
DOPSoft – ustawienia cz. 2
W zakładce [Control Block] możemy przypisać adres rejestrom kontrolnym (np. fladze zapisu receptur do PLC ) 1 – wybór portu komunikacyjnego oraz adresu rejestru 2 – wybór flag które będą wykorzystywane 3 – wybór automatycznego resetu flagi
 1 – wybór portu komunikacyjnego oraz adresu rejestru 2 – wybór flag które będą wykorzystywane 3 – wybór automatycznego resetu flagi.")
45
DOPSoft – Przyciski

46
DOPSoft – Przyciski ustawienia
Konfiguracja przycisku: 1 – Adres który ma być nadpisany i odczytany w wyniku naciśnięcia przycisku 2 – stan przycisku dla 0 lub 1

47
DOPSoft – Wybór kanału i adresu
Link – wybór kanału np. PLC połączony po RS 485 kontroler Delta DVP PLC Device Type – wybór rodzaju rejestrów / markerów/ wejść / wyjść itd. Adress/Value – numer lub adres

48
DOPSoft – Wyświetlenie DOPSoft – Wejścia numeryczne

49
DOPSoft – Utworzenie nowego ekranu
W celu utworzenia nowego ekranu należy wejść w [Screen] → [New Screen]. Następnie należy podać nazwę nowego ekranu oraz oraz numer W celu przejścia pomiędzy ekranami należy utworzyć przycisk [Goto Screen]

50
DOPSoft – Utworzenie podekranu
W momencie w którym utworzyliśmy nowy ekran możemy go zmienić na podekran. W tym celu należy kliknąć prawym przyciskiem myszy na ekran i wybrać [Screen properties]. Po pojawieniu się okna należy zaznaczyć opcję [This screen is a sub-screen] oraz podać wielkość utworzonego okna Włączenie podekranu odbywa się identycznie jak zwykłego ekranu poprzez przycisk [Goto Screen]

51
DOPSoft – Dodanie nowego języka

52
DOPSoft – Poziom dostępu

53
DOPSoft – Dodanie zewnętrznej grafiki
Picture Bank

54
DOPSoft – Alarmy

55
DOPSoft – Receptury

56
DOPSoft – Makra

57
DOPSoft – Makra Dostęp do wszystkich poleceń makra możemy uzyskać wchodząc w pole [Wizzard Macro] Wybierając [Command] dostanie dostęp do listy instrukcji jakie są dostępne w makrze. Na dole pojawi się lista zmiennych jakie muszą być wprowadzone do danej instrukcji Aby zaakceptować instrukcję należy wybrać [Update]
![DOPSoft – Makra Dostęp do wszystkich poleceń makra możemy uzyskać wchodząc w pole [Wizzard Macro]](http://slideplayer.pl/slide/2988428/10/images/57/DOPSoft+%E2%80%93+Makra+Dost%C4%99p+do+wszystkich+polece%C5%84+makra+mo%C5%BCemy+uzyska%C4%87+wchodz%C4%85c+w+pole+%5BWizzard+Macro%5D.jpg "Wybierając [Command] dostanie dostęp do listy instrukcji jakie są dostępne w makrze. Na dole pojawi się lista zmiennych jakie muszą być wprowadzone do danej instrukcji. Aby zaakceptować instrukcję należy wybrać [Update]")
58
HMI – eRemote zdalny dostęp

59
HMI eServer – zbieranie danych
Database

60
DOPSoft – Uaktywnienie opcji eRemote i eServer

61
Falowniki

62
Falowniki – seria EL - Sterowanie: skalarne / wektorowe*
- Moc: 0,2 ~ 2,2 kW dla zasilania 1 x 230V AC - Moc: 0,4 ~ 3,7 kW dla zasilania 3 x 460V AC - Przeciążalność: 150% przez minutę - Częstotliwość wyjściowa: 0,1 ~ 600Hz - Temperatura praca: -10 st. C ~ +50 st. C - Wbudowany filtr EMI - Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU (prędkość kbit/s) - Opcjonalne moduły magistral (DeviceNet, Profibus, LonWorks i CANopen) - Wbudowane 6 wejść cyfrowych/ 1 wyjścia cyfrowe - Wbudowane 1 wejście analogowe i 1 wyjście analogowe
 - Opcjonalne moduły magistral (DeviceNet, Profibus, LonWorks i CANopen) - Wbudowane 6 wejść cyfrowych/ 1 wyjścia cyfrowe. - Wbudowane 1 wejście analogowe i 1 wyjście analogowe.")
63
Falowniki – seria E - Sterowanie: skalarne/ wektorowe bezczujnikowe lub w zamkniętej pętli prędkościowej - Moc: 0,2 ~ 2,2 kW dla zasilania 1 x 230 V AC - Moc: 0,4 ~ 22 kW dla zasilania 3 x 460 V AC - Przeciążalność: 150% przez minutę - Częstotliwość wyjściowa:0,1 ~ 600 Hz - Temperatura praca: -10 st. C ~ +50 st. C - Wbudowana funkcjonalność PLC (500 kroków pamięci) - Wbudowany filtr EMI - Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU (prędkość kbit/s) -Opcjonalne moduły magistral (DeviceNet, Profibus, LonWorks i CANopen) - Wbudowane 6 wejść cyfrowych/ 2 wyjścia cyfrowe - Wbudowane 2 wejścia analogowe i 1 wyjście analogowe
 - Wbudowany filtr EMI. - Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU (prędkość kbit/s) -Opcjonalne moduły magistral (DeviceNet, Profibus, LonWorks i CANopen) - Wbudowane 6 wejść cyfrowych/ 2 wyjścia cyfrowe. - Wbudowane 2 wejścia analogowe i 1 wyjście analogowe.")
64
Falowniki – seria C200 - Sterowanie: skalarne/ wektorowe bezczujnikowe/ wektorowe w pętli zamkniętej - Moc: 0,4 ~ 2,2 kW dla zasilania 1 x 230 V AC - Moc: 0,75 ~ 7,5 kW dla zasilania 3 x 460 V AC - Przeciążalność: 120% przez minutę, 160% przez 3 sekundy - Częstotliwość wyjściowa: 0,1 ~ 600 Hz - Obsługa silników indukcyjnych i silników synchronicznych z magnesami trwałymi - Wbudowana funkcjonalność PLC z pamięcią 5000 kroków - Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU - Praca w sieci CANopen (tryb Slave) - Wbudowane 10 wejść cyfrowych (w tym 2 wejścia szybkie do 33 kHz) i 4 wyjścia cyfrowe (w tym 2 wyjścia szybkie do 33 kHz) - Wbudowane 3 wejścia analogowe i 2 wyjścia analogowe
 - Wbudowane 10 wejść cyfrowych (w tym 2 wejścia szybkie do 33 kHz) i 4 wyjścia cyfrowe (w tym 2 wyjścia szybkie do 33 kHz) - Wbudowane 3 wejścia analogowe i 2 wyjścia analogowe.")
65
Falowniki – seria C2000 - Sterowanie: skalarne/ wektorowe bezczujnikowe/ wektorowe w pętli zamkniętej - Tryb: prędkościowy/ momentowy/ pozycyjny - Moc: 0,75 ~ 355 kW dla zasilania 3 x 460 V AC - Przeciążalność: 150% przez minutę - Częstotliwość wyjściowa: 0,1 ~ 600 Hz - Obsługa silników indukcyjnych i silników synchronicznych z magnesami trwałymi - Przy pracy z kartą enkoderową nawet do 200% momentu przy rozruchu - Wbudowany tranzystor hamowania (do 30kW) - Wbudowany dławik DC (powyżej 30kW) - Wbudowana funkcjonalność PLC (10000 kroków pamięci) - Wbudowany filtr EMI (modele z oznaczeniem „E”) -Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU -Duża ilość dodatkowych modułów (3 wolne sloty na falowniku) - Opcjonalne moduły magistral (DeviceNet, Profibus, CANopen Master/Slave, Modbus TCP, EtherNet/IP)
 - Wbudowany dławik DC (powyżej 30kW) - Wbudowana funkcjonalność PLC (10000 kroków pamięci) - Wbudowany filtr EMI (modele z oznaczeniem „E ) -Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU. -Duża ilość dodatkowych modułów (3 wolne sloty na falowniku) - Opcjonalne moduły magistral (DeviceNet, Profibus, CANopen Master/Slave, Modbus TCP, EtherNet/IP)")
66
Falowniki – seria CP2000 - Sterowanie: skalarne/ wektorowe bezczujnikowe - Moc: 0,75 ~ 400 kW dla zasilania 3 x 460 V AC - Przeciążalność: 120% przez minutę, 160% przez 3 sekundy - Częstotliwość wyjściowa: 0,1 ~ 600 Hz - Parametryzowalny tryb pracy wielopompowej - Wbudowany sterownik PLC (10000 kroków pamięci) z RTC - Wbudowany filtr EMI (modele z oznaczeniem „E”) - Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU oraz BacNet - Duża ilość dodatkowych modułów (2 wolne sloty na falowniku) - Opcjonalne moduły magistral (DeviceNet, Profibus, CANopen Master/Slave, Modbus TCP, EtherNet/IP) - Wbudowane 10 wejść cyfrowych/ 3 wyjścia cyfrowe - Wbudowane 3 wejścia analogowe i 2 wyjścia analogowe
 z RTC. - Wbudowany filtr EMI (modele z oznaczeniem „E ) - Wbudowany port RS485 z zaimplementowanym protokołem Modbus ASCII / RTU oraz BacNet. - Duża ilość dodatkowych modułów (2 wolne sloty na falowniku) - Opcjonalne moduły magistral (DeviceNet, Profibus, CANopen Master/Slave, Modbus TCP, EtherNet/IP) - Wbudowane 10 wejść cyfrowych/ 3 wyjścia cyfrowe. - Wbudowane 3 wejścia analogowe i 2 wyjścia analogowe.")
67
Falowniki – seria C2000

68
Falowniki – seria E

69
Falowniki – seria C2000 Sygnały sterujące

70
Falowniki – Okablowanie
Seria E

71
Falowniki – Podłączenie sygnałów logicznych

72
Falowniki – Analog Dla C2000

73
Falowniki – Panel C2000/CP2000

74
Falowniki – Panel C2000/CP2000

75
Falowniki – Panel E / EL / C200

76
Falowniki – Panel E / EL / C200

77
Falowniki – Źródło zadanej częstotliwości
Dla C2000 / CP2000 / C200 parametr P00-20 Dla serii E / EL parametr P02-00

78
Falowniki – Źródło zadanej częstotliwości
Dla C2000 / CP2000 / C200 parametr P00-20 Dla serii E / EL parametr P02-00

79
Falowniki – Źródło zadanej częstotliwości
Multi-speed

80
Falowniki – Źródło sygnału sterującego
Dla C2000 / CP2000 / C200 parametr P00-21 Dla serii E / EL parametr P02-01

81
Falowniki – Podstawowe parametry
Reset parametrów do ustawień fabrycznych P00-02 Parametr wyświetlany po starcie - P00-03 Parametr wyświetlany na panelu – P00-04 Tryb sterowania (skalarne/wektorowe) – P00-10 dla serii E, P00-11 dla serii C2000/ CP2000 Źródło zadanej częstotliwości - P02-00 dla E/EL P00-20 dla C2000/CP2000 Źródło sygnałów sterujących - P02-01 dla E/EL P00-21 dla C2000/CP2000 Maksymalna częstotliwość wyjściowa P01-00 Czas przyspieszania – P01-12 Czas hamowania – P01-13 Funkcja wyjść cyfrowych – P03-00 dla E / EL, P02-13 P02-14 dla C2000/ CP2000 i P02-15 dla CP2000 Funkcja wejść cyfrowych – P P04-08 dla serii E/EL, P02-01 – P02-08 dla C2000/CP2000 Funkcje wejść analogowych – P P03-02 dla C2000/CP2000 Zakresy sygnałów AVI i ACI dla C P3-28, P3-29 Wyjścia analogowe – P03-03 dla serii E, P03-20 i P03-23 dla C2000/CP2000 Kody ostatnich 6 błędów – P06-18-P06-22 Regulacja PID – P10-00-P10-04 dla serii E, P P08-03 dla C2000/ CP2000
 – P00-10 dla serii E, P00-11 dla serii C2000/ CP2000. Źródło zadanej częstotliwości - P02-00 dla E/EL P00-20 dla C2000/CP2000. Źródło sygnałów sterujących - P02-01 dla E/EL P00-21 dla C2000/CP2000. Maksymalna częstotliwość wyjściowa P Czas przyspieszania – P Czas hamowania – P Funkcja wyjść cyfrowych – P03-00 dla E / EL, P02-13 P02-14 dla C2000/ CP2000 i P02-15 dla CP2000. Funkcja wejść cyfrowych – P P04-08 dla serii E/EL, P02-01 – P02-08 dla C2000/CP2000. Funkcje wejść analogowych – P P03-02 dla C2000/CP2000. Zakresy sygnałów AVI i ACI dla C P3-28, P3-29. Wyjścia analogowe – P03-03 dla serii E, P03-20 i P03-23 dla C2000/CP2000. Kody ostatnich 6 błędów – P06-18-P Regulacja PID – P10-00-P10-04 dla serii E, P P08-03 dla C2000/ CP2000.")
82
Falowniki – Komunikacja po Modbusie
na przykładzie serii E

83
Falowniki – Karty rozszerzeń C2000

84
Falowniki – Sterowanie wektorowe / Autotuning
Parametry silnika dla C2000 Procedura Auto-tuningu 1. Reset parametrów do ustawień fabrycznych P00-02 na 9 2. Ustawienie parametrów silnika. 3. Wybranie trybu auto-tuningu P05-00 na 1 jeżeli silni jest nieobciążony i może się obracać P05-00 na 2 jeżeli silnik obciążony lub nie może się obracać. Wybór tego trybu wymaga ustawienia wartości prądu silnika bez obciążenia P05-05 dla silnika 1/ P dla silnika 2 (zazwyczaj około 40% prądu znamionowego) 4. Naciśnięcie przycisku [RUN] spowoduje rozpoczęcie auto-tuningu 5. Wybór metody sterowania parametr P00-11
 4. Naciśnięcie przycisku [RUN] spowoduje rozpoczęcie auto-tuningu. 5. Wybór metody sterowania parametr P")
85
Falowniki – uruchomienie PLC
Dla serii E i C200 Dla C2000 i CP2000

86
Falowniki – PLC wejścia/ wyjścia dla C2000

87
Falowniki – PLC funkcje

88
Dziękujemy za Uwagę

Podobne prezentacje





>")














