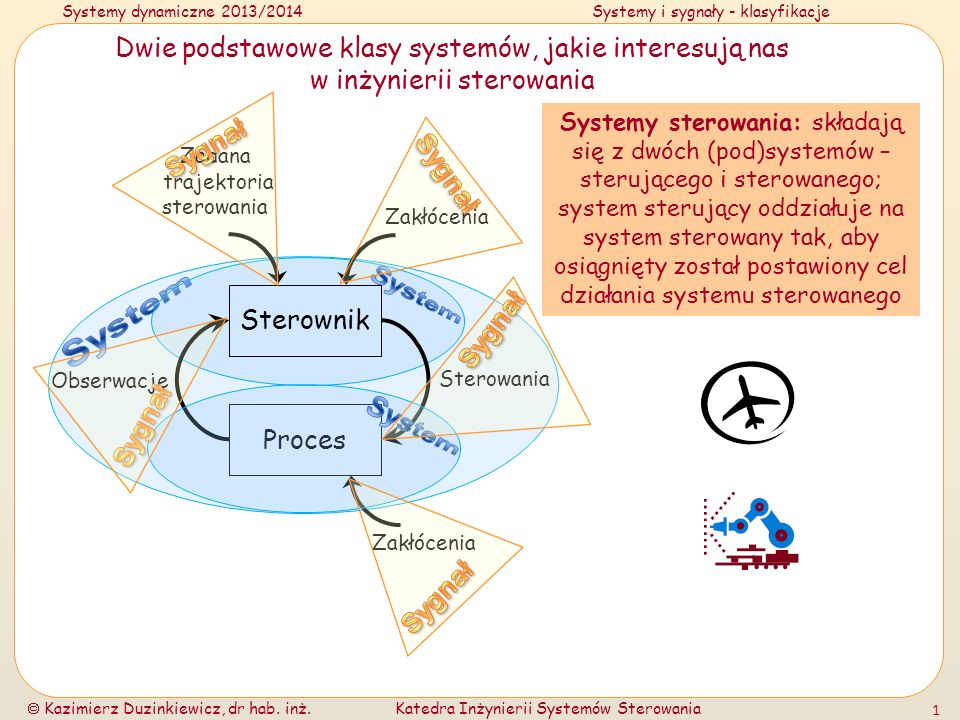
Dwie podstawowe klasy systemów, jakie interesują nas w inżynierii sterowania Sygnał Systemy sterowania: składają się z dwóch (pod)systemów – sterującego i sterowanego; system sterujący oddziałuje na system sterowany tak, aby osiągnięty został postawiony cel działania systemu sterowanego Sygnał Zadana trajektoria sterowania Zakłócenia System System Sygnał Sterownik Sygnał Obserwacje Sterowania System Proces Zakłócenia Sygnał
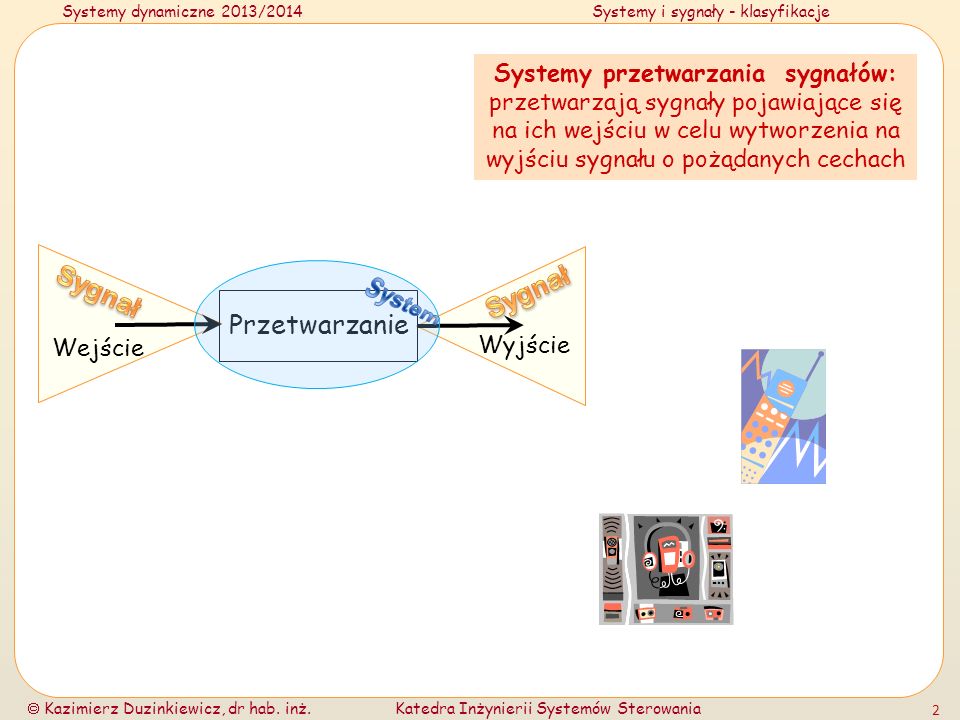
System Sygnał Sygnał Przetwarzanie Systemy przetwarzania sygnałów: przetwarzają sygnały pojawiające się na ich wejściu w celu wytworzenia na wyjściu sygnału o pożądanych cechach Sygnał Sygnał System Przetwarzanie Wejście Wyjście
Systemy sterowania Pralka Silnik samochodowy i układ hamulcowy Roboty Rafineria nafty
Systemy przetwarzania sygnałów Studio nagrań cyfrowych Komunikacja satelitarna Kompresja obrazów video Rozpoznawanie obrazów Animacje filmowe
Modele… W inżynierii sterowania, pracujemy bardzo często z modelami , które pozbawione są nieistotnych, z punktu widzenia rozwiązywanego problemu, szczegółów i można nimi „manipulować” w sposób w jaki nie można tego robić z obiektami rzeczywistymi
Sygnał – definicja szeroka Sygnał jest funkcją, która reprezentuje informację Informacja w formie Rzeczywistość wielkości fizycznej (prąd, napięcie, … wielkości audio-wizualnej ……. “Sygnał” MODEL Funkcja matematyczna Abstrakcja
Skupimy się na sygnałach, które są funkcjami czasu Sygnał – definicja wąska Sygnał jest funkcją czasu Np.: f – siła działająca na pewna masę vwy – napięcie wyjściowe pewnego obwodu p – ciśnienie akustyczne w pewnym punkcie Notacje: f , vwy, p lub f(), vwy(), p() – sygnał jako całość, funkcja f(t), vwy(1.2), p(t+2) – wartość sygnału w chwili t, 1.2, t+2 odpowiednio Dla czasu będziemy zwykle używali symboli: t, , t1, . . .
Sygnał – określony na dziedzinie Dziedzina sygnału w szerokim sensie: zbiór na którym określony jest sygnał – zbiór zmiennych niezależnych Dziedzina sygnału w wąskim sensie: zbiór chwil czasowych na którym określony jest sygnał – zbiór zmiennych niezależnych Dziedzina sygnału może być: ciągła – sygnał ciągły w czasie dyskretna – sygnał dyskretny w czasie Powszechne dziedziny: wszystkie t tzn. tR nieujemne t: t0 (t = 0, oznacza zwykle początkowy punkt obserwacji t w pewnym przedziale: a t b t w równomiernie rozłożonych punktach: t = kh + t0, k = 0, 1, 2, …
Napięcie mikrofonu [mV] Sygnały - przykłady Przykład 1 – napięcie na wyjściu mikrofonu dla słowa „car”: Napięcie mikrofonu [mV] Czas [ms] Sygnał – ciągły w czasie, ciągły w wartości (napięcie mikrofonu) Czas – zmienna niezależna Napięcie mikrofonu – zmienna zależna
Zmiana temperatury [K] Przykład 2 – zmiana temperatury ściany budynku o grubości 15 [cm] przy skokowej zmianie temperatury zewnętrznej o 10[K]: Zmiana temperatury [K] Położenie [m] Powierzchnia zewnętrzna Powierzchnia wewnętrzna Sygnał - ciągły w czasie i położeniu, ciągły w wartości (temperatura) Położenie w ścianie, czas – zmienne niezależne Temperatura ściany – zmienna zależna
Przykład 3 – wartość indeksu giełdowego w pewnym okresie Czas [tygodnie] Sygnał - dyskretny w czasie, ciągły w wartości (wartość indeksu) Czas – zmienna niezależna Wartość indeksu – zmienna zależna
Przykład 4 – oceny z teorii systemów w pewnym uniwersytecie Liczba ocen [-] Ocena[-] Sygnał - dyskretny w skali ocen, dyskretny w wartości (liczba ocen) Skala ocen – zmienna niezależna Liczba ocen – zmienna zależna
Przykład 5 – stopnie szarości obrazu Sygnał – ciągły w klatce obrazu (współrzędne), ciągły w skali szarości Współrzędne klatki obrazu – zmienne niezależne Stopień szarości – zmienna zależna
Przykład 6 – zmienność stopni szarości obrazu w czasie Czas[s] Sygnał – ciągły w klatce obrazu (współrzędne), ciągły w skali szarości i dyskretny w czasie, Współrzędne klatki obrazu, czas – zmienne niezależne Stopień szarości – zmienna zależna
Sygnały - klasyfikacje ciągłe w czasie – dyskretne w czasie t R, x(t) = sin(2440t) t x Dziedzina sygnału: zbiór liczb rzeczywistych Sygnał ciągły w czasie - analogowy n N, x(n) = sin(2n 440T) n x T Dziedzina sygnału: zbiór liczb naturalnych Sygnał dyskretny w czasie - próbkowany
Sygnał – ma określony wymiar i jednostki miary Wyróżniamy: sygnały skalarne: u(t) jest liczbą rzeczywistą sygnały wektorowe: u(t) jest wektorem o pewnym wymiarze Skupimy się na sygnałach skalarnych Jednostki miary to jednostki fizyczne sygnału Np.: V, mA, m/s, … czasem jednostka miary jest 1 (sygnał bezmiarowy) lub nie jest on specyfikowany
Sygnał – przyjmuje określone wartości Wartości sygnału: zbiór z którego wybierane są wartości sygnału Sygnał może przyjmować wartości: ciągłe – sygnał ciągły co do wartości dyskretne – sygnał dyskretny co do wartości – sygnał skwantowany Powszechne dziedziny: wszystkie wartości rzeczywiste tzn. uR wartości rzeczywiste z pewnego przedziału: a u b wartości wymierne wynikające z kwantyzacji sygnału tzn. uQ
Sygnał ciągły w czasie i ciągły co do wartości – sygnał analogowy Głos Amplituda Czas A/D x y Sygnał dyskretny w czasie i dyskretny co do wartości – sygnał cyfrowy Indeks Amplituda (I16) Głos komputerowy
Cztery najbardziej nas interesujące kategorie sygnałów: Sygnał ciągły w czasie i ciągły co do wartości – sygnał analogowy Amplituda Czas Sygnał ciągły w czasie i dyskretny co do wartości – sygnał ciągły skwantowany Amplituda Czas Sygnał dyskretny w czasie i ciągły co do wartości – sygnał próbkowany Amplituda Czas Sygnał dyskretny w czasie i dyskretny co do wartości – sygnał cyfrowy Amplituda Czas
Układ sterowania cyfrowego Zatrzask i przetwornik A/D Zegar Komputer cyfrowy Przetwornik D/A Aproksymator Element wykonawczy Obiekt sterowany Czujnik i przekształtnik Układ przetwarzania cyfrowego sygnałów Przekształtnik sygnału Filtr dolnoprzep. Zatrzask i przetwornik A/D Monitor Klawiatura Przetwornik A/D i aproksym. Procesor Pamięć programu Pamięć danych Modem Do innego układu cyfrowego przetwarzania sygnałów
Stosowane oznaczenia: Sygnał – niosąc informację o stanie lub zachowaniu systemu fizycznego, jest reprezentowany matematycznie jako funkcja jednej lub wielu zmiennych niezależnych Stosowane oznaczenia: Sygnał ciągły w czasie Sygnał dyskretny w czasie Sygnał ciągły w wartości Sygnał dyskretny w wartości Przykładowe połączenia: Próbkowanie w t = nT T: okres próbkowania Przetwarzanie D/A Zatrzaskiwanie Przetwarzanie A/D
! Będziemy pomijać efekt kwantyzacji przetwarzania analogowo – cyfrowego i stosowali zamiennie określenia sygnał/system dyskretny i sygnał system cyfrowy
Elementarne sygnały analogowe i cyfrowe Funkcja skoku jednostkowego Sekwencja skoku jednostkowego także: Funkcja skoku opóźnionego i skalowanego Sekwencja skoku opóźnionego i skalowanego
Funkcja impulsu jednostkowego Sekwencja impulsu jednostkowego także: Funkcja impulsu opóźnionego i skalowanego Sekwencja impulsu opóźnionego i skalowanego
Zależności: - pomiędzy (t) i uS(t) - pomiędzy [n] i uS[n]
Funkcja impulsu prostokątnego Sekwencja impulsu prostokątnego
Funkcja impulsu trójkątnego Sekwencja impulsu trójkątnego
Funkcja eksponencjalna rzeczywista Sekwencja eksponencjalna rzeczywista
Funkcja sinusoidalna rzeczywista Sekwencja sinusoidalna rzeczywista
Będziemy rozróżniali: System jest obiektem lub procesem, który przetwarza sygnały, czyli wytwarza odpowiedź nazywaną wyjściem w odpowiedzi na wymuszenie nazywane wejściem Najbardziej ogólnie: System może być opisany za pomocą pewnego operatora skalarnego O lub wektorowego O, który wiąże wektor sygnału wejściowego u(t) z wektorem sygnału wyjściowego y(t) Będziemy rozróżniali: System ciągły System dyskretny Wejście Wyjście O
Systemy liniowe i nieliniowe (Linear and Nonlinear systems) Mówimy, że system jest liniowy jeżeli spełnia on zasadę superpozycji, to znaczy, że posiada on następujące właściwości: Jednorodność: Wyjście systemu pobudzanego pojedynczym wejściem u(t) wzmocnionym w stopniu a jest wzmocnionym w takim samym stopniu wyjściem systemu odpowiadającym wejściu u(t)
Addytywność: Wyjście systemu pobudzanego przez sumę wejść jest taką samą sumą jego wyjść obserwowanych dla każdego z tych wejść oddzielnie
Graficzna ilustracja warunku addytywności
Praktyczne wskazówki: Na nieliniowość wskazują jakiekolwiek niezerowe stałe w opisie systemu jakiekolwiek nieliniowe wyrażenia związane z sygnałami takie np. jak x2(t) x(t)y(t) i pochodnymi sygnałów ciągłych czasu w równaniu różniczkowym lub różnicowym Przykłady: Systemy ciągłe: Systemy dyskretne: Liniowe Nieliniowe
Łącznie zasada superpozycji Systemy ciągłe: Jeżeli dla wejścia systemu wyjście systemu jest to dla wejścia systemu wyjście systemu jest to znaczy
Systemy dyskretne: Jeżeli dla wejścia systemu wyjście systemu jest to dla wejścia systemu wyjście systemu jest to znaczy
Przykład - system ciągły dynamiczny Mając system dynamiczny opisany równaniem różniczkowym określić, czy jest on liniowy dla zerowych warunków początkowych
a) Niech: y1(t) wyjście systemu dla wejścia u1(t), a y2(t) wyjście systemu dla wejścia u2(t) Zatem: oraz
Dla systemu liniowego, dla wejścia wyjście jest Podstawiając do równania systemu otrzymamy System jest liniowy
b) Niech: y1(t) wyjście systemu dla wejścia u1(t), a y2(t) wyjście systemu dla wejścia u2(t) Zatem: oraz
System jest nieliniowy Dla systemu liniowego, dla wejścia wyjście jest Podstawiając do równania systemu otrzymamy System jest nieliniowy
Systemy dyskretne dynamiczne: Mając system dynamiczny opisany równaniem różnicowym określić, czy jest on liniowy Sprawdzić osąd dla wejść oraz obliczając cztery pierwsze wartości wyjść Przyjąć warunek początkowy
a) Niezerowy składnik stały sugeruje nieliniowość – można zastosować metodę kontrprzykładu, tzn. pokazać jeden przykład, kiedy zasada superpozycji nie jest spełniona dla systemu Spróbujemy pokazać najpierw ogólnie, że system jest nieliniowy Niech: y1[n] wyjście systemu dla wejścia u1[n], a y2[n] wyjście systemu dla wejścia u2[n] Zatem dla wejścia Dla wejścia wyjście wyjście Kombinacja liniowa wyjść y1[n] i y2[n] dla wejść u1[n] i u2[n] wyniesie
System jest nieliniowy Dla systemu liniowego, dla kombinacji liniowej wejść u1[n] i u2[n] wyjście powinno wynosić zatem Otrzymaliśmy poprzednio System jest nieliniowy
Sprawdzimy nasz osąd na przykładzie Iteracyjnie policzymy cztery pierwsze wartości wyjść Dla sygnału u1[n] Dla sygnału u2[n] czyli czyli Kombinacja liniowa sygnałów wyjścia
System jest nieliniowy Odpowiedź systemu na podaną kombinację liniową sygnałów wejściowych wyniesie czyli zatem Otrzymaliśmy poprzednio System jest nieliniowy
b) Dla wejścia Dla wejścia wyjście będzie wynosić wyjście będzie wynosić zatem Dla wejścia wyjście powinno wynosić zatem System jest liniowy
Sprawdzimy nasz osąd na przykładzie Iteracyjnie policzymy cztery pierwsze wartości wyjść Dla sygnału u1[n] Dla sygnału u2[n] czyli czyli Kombinacja liniowa sygnałów wyjścia
Odpowiedź systemu na podaną kombinację liniową sygnałów wejściowych czyli zatem Otrzymaliśmy poprzednio System jest liniowy
– koniec materiału prezentowanego podczas wykładu Dziękuję – koniec materiału prezentowanego podczas wykładu