Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Kategorie systemów czasu rzeczywistego

2
Podstawowe definicje

3
Podstawowe definicje

4
Standard IEEE / ANSI

5
System Czasu Rzeczywistego
Sensory Sterowniki Otoczenie KOMPUTER

6
Kategorie SCR

7
Kategorie SCR

8
Kategorie SCR

9
Cechy SCR

10
Problematyka SCR

11
JEDNOSTKA PLANUJĄCO - STERUJĄCA
Strategia PUSH JEDNOSTKA PLANUJĄCO - STERUJĄCA M M M M Materiały Sterowanie Informacje

12
Strategia PUSH

13
JEDNOSTKA PLANUJĄCO - STERUJĄCA
Strategia SQUEEZE JEDNOSTKA PLANUJĄCO - STERUJĄCA M B Materiały Sterowanie Informacje

14
Strategia SQUEEZE

15
JEDNOSTKA PLANUJĄCO - STERUJĄCA
Strategia PULL JEDNOSTKA PLANUJĄCO - STERUJĄCA M Materiały Sterowanie Ssanie

16
Systemy JIT

17
Notacja (trójpolowa)
 ")
18
= 1 2

19
= 1, 2, 3, 4, 5

20
Dodatkowe zasoby (discretely-additional resources)
")
22
Wymagania kolejnościowe zadań.
in–tree out–tree

23
Parametry zadania

24
Parametry zadania

25
Kryteria optymalizacji

26
Kryteria optymalizacji

27
Zależności między kryteriami
wi Ti Lmax wi Ci Ti Ci Cmax Kryteria 1, 2 są w relacji 1 2 jeśli rozwiązanie problemu z kryterium 2 dostarcza rozwiązania problemu z kryterium 1.

28
System permutacyjny (PF, Permutation Fow-shop)
1 2 m Przepływ zadań Stanowisko obsługi Maszyna

29
System (F, Flow-shop) Przepływ zadań Stanowisko obsługi Maszyna 1 2 m
 Przepływ zadań Stanowisko obsługi Maszyna 1 2 m")
30
System gniazdowy (J, Job-shop)
Przepływ zadań Stanowisko obsługi Maszyna 1 2 m

31
System równoległy (P, Parallel-shop)
Przepływ zadań Stanowisko obsługi Maszyny

32
System gniazdowy równoległy
Przepływ zadań Stanowisko obsługi Maszyny

33
Typy zagadnień szeregowania

34
Algorytm Johnsona O(nlogn)
Cmax(*) = m i n Cmax() *
 = m i n Cmax() * ")
35
Problem PF3|P2, no-bottl.|Cmax

36
Algorytm Johnson O(nlogn)
")
37
Zadania podzielne. Procesory równoległe

38
Zadania podzielne. Procesory równoległe
2 6 4 P1 P2 Z4 Z3 P3 Z2 Z1 Z5

39
Zadania podzielne. Procesory równoległe
2 6 4 P1 P2 Z5 Z3 Z2 Z1 Z4 Z6 8 10

40
Zadania zależne. Procesory równoległe

41
Algorytm Hu, Przykład 1 2 3 4 Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 Z10 Z11 Z9 2 6 4
P1 P2 Z2 Z1 Z4 Z3 Z6 Z8 Z5 Z7 Z9 Z10 Z11

42
Zadania niezależne, procesory równoległe
LPT P1 P2 P3 RPT

43
Reguła EDD (Earliest Due Date)
Z2 Z1 d1 d2 Z1 Z2 d1

44
Zadania niezależne, przerywalne.

45
Zadania zależne, przerywalne.

46
Zadania zależne, procesory równoległe.

47
Przykład P| pj=1, in–tree | Lmax
0*, 4 0*, 2 0*, 2 Z1 Z2 Z3 -1*, 2 -1*, 3 Z4 Z5 Z6 -1*, 4 -2*, 3 Z7 Z8 -4*, 5 2 4 P2 P3 Z3 Z2 Z6 Z5 Z7 Z9 Z1 P1 Z4 Z8 L*max= 0 Z10 Z9 -5*, 6 dj*, dj -6*, 7 Z10

48
Zadania niepodzielne, dodatkowe zasoby

49
Przykład Ppodz, res11Cmax
Zj Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 R(Zj) 1 rj 4 2 3 5 7 2 4 P2 Z4 Z5 Z1 P1 Z7 6 8 10 Z6 Z8 Z3 Z2 P3
 1. rj P2. Z4. Z5. Z1. P1. Z Z6. Z8. Z3. Z2. P3.")
50
Cykliczny algorytm FIFO

51
Struktura kolejki w algorytmie cyklicznym
1 2 3 4 6 5 7 Kierunek obsługi

52
Cykliczny algorytm LIFO (Last in First Out)
Kolejka Stanowisko obsługi Zadania przerwane Zadania zakończone

53
Cykliczny algorytm SS (Selfish Scheduling)
")
54
System obsługi wg. algorytmu SS
Kolejka System kolejek Stanowisko obsługi Zadania wykonane Podstawowy algorytm szeregowania Nowe zadania Zadania oczekujące Zadania wykonywane

55
Szeregowanie zadań cyklicznych:

57
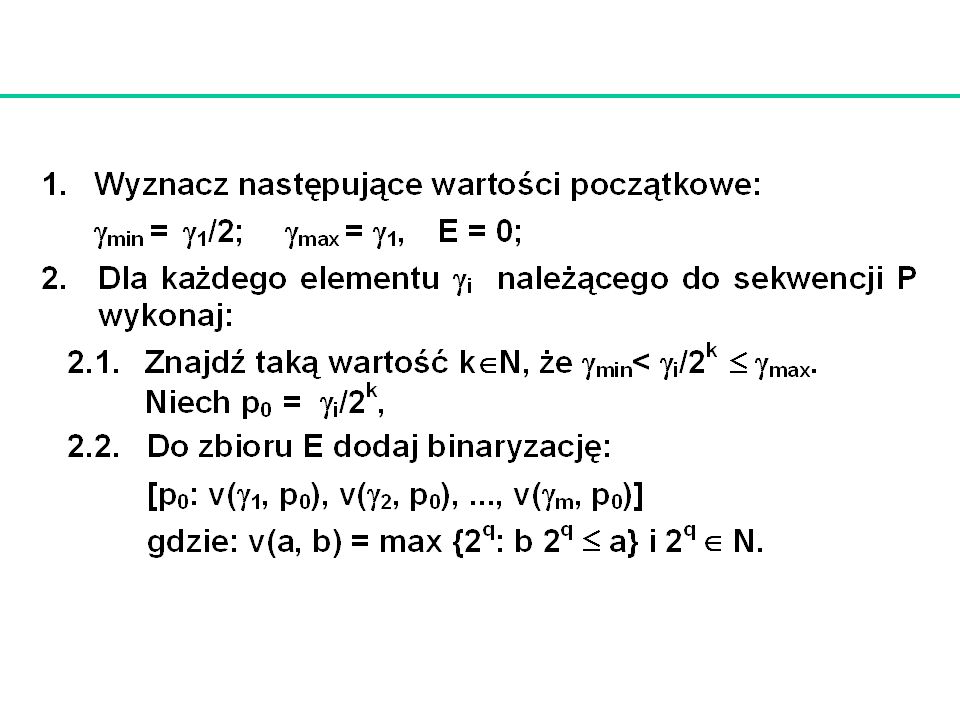
Binaryzacja okresów zadań

58
Binaryzacja niezdominowana
T1 T2 T3 T4 T5 1 7 8 14 15 21 22 28 Uszeregowanie dopuszczalne dla binaryzacji B1: [7: 1, 4]

59
Binaryzacje niezdominowane

61
Komunikacja między zadaniami

62
Kolejki komunikatów Kolejka zadań odbierających wysyłających
Blok kontrolny kolejki Długość kolejki Rozmiar wiadomości Element

63
Jednokierunkowa komunikacja
Kolejki komunikatów Kopia I Kopia II Bufor zadania wysyłającego Bufor zadania odbierającego Jednokierunkowa komunikacja

64
Semafor

65
Rejestry zdarzeń. Flagi zdarzeń.
OR /AND 1 ZAD1 ZAD2 Ustawienie flag zdarzeń ZAD3 Użycie rejestru i flag zdarzeń

66
Potoki ZAD. CZYTAJĄCE PISZĄCE DANE POTOK Deskryptor

67
Zakleszczenie (deadlock)
KOLEJKA (pusta) ZADANIE 2 (czeka na semafor) SEMAFOR ZADANIE 1 (czeka na dane, posiada semafor)
 ZADANIE 2. (czeka na semafor) SEMAFOR. ZADANIE 1. (czeka na dane, posiada semafor)")
68
Przeterminowanie (starvation)
KOLEJKA ZADANIE 2 SEMAFOR ZADANIE 1 ZADANIE 3

69
Inwersja priorytetów (priority inversion)
ZAD1 ZAD2 NISKI WYSOKI Priorytet t1 t2 t3 t4 t5 Inwersja priorytetów

70
Inwersja priorytetów Inwersja priorytetów Priorytet Nieznany czas
WYSOKI NISKI t3 t4 t5 t6 t1 t2 t7

71
Usługi jądra systemu czasu rzeczywistego

72
Jądro z wywłaszczaniem
ZADANIE A 1 7 3 5 2 IRS 4 ZADANIE B 6 Czas wykonanie

73
Stany zadania

74
ZADANIE 1 Stos STATUS Wskaźnik stosu Priorytet TCB . . . Kontekst Pamięć CPU Rejestry CPU ZADANIE n

75
Przełączanie kontekstu

76
Cechy systemu VxWorks

77
Stany zadania VxWorks WYKONYWANE GOTOWE OCZEKUJĄCE WSTRZYMANE
ZAWIESZONE

78
Mechanizmy Komunikacji między zadaniami

79
Współdzielona pamięć, wzajemne wykluczanie
ZADANIE 1 ZADANIE 2 ZADANIE 3 Wsp_Dane PAMIĘĆ

80
Semafory VxWorks

81
Inwersja priorytetów Priorytet Zadanie A Zadanie B Zadanie C
w posiadaniu semafora czas wywłaszczenie blokada oddanie semafora pobranie semafora

82
Dziedziczenie priorytetów
Zadanie A Zadanie B czas w posiadaniu semafora wywłaszczenie blokada pobranie semafora C A B oddanie semafora dziedziczenie priorytetu Zadanie C

83
System RTLinuks

84
Systemy KURT, MERT

85
Cechy systemu RTLinuks

86
Architektura systemu RTLinux
Zwykłe procesy Linuksa Funkce systemowe, POSIX Drivery Linux Zadanie czasu rzecz. Zadanie czasu rzecz. RT-Linux Scheduler we/wy Przerwania Sprzęt

87
Zadania RTLinuksa

88
Szeregowanie i komunukacja w RTLinuksie

89
Architektura systemu QNX
MIKROJĄDRO Zadania (procesy ) systemowe Zadania (procesy) aplikacyjne Poziom zadań Poziom jądra systemu
 systemowe. Zadania (procesy) aplikacyjne. Poziom zadań. Poziom jądra systemu.")
90
Zadania (procesy) systemowe QNX
 systemowe QNX")
91
Funkcje mikrojądra QNX

92
Struktura mikrojądra QNX
ZAD ZAD Mechanizmy komunikacji (IC) SCHEDULER Przekierowania przerwania (IR) Interfejs sieciowy (NI) Przerwania Zarządca sieci (NM)
 SCHEDULER. Przekierowania przerwania (IR) Interfejs sieciowy (NI) Przerwania. Zarządca sieci (NM)")
93
Zadania (procesy) systemowe
Send Receive Reply G W M Z ZReceive ZSend Diagram przejść między zadaniami

94
Szeregowanie, komunikacja i synchronizacja

95
Implementacja spotkania
Wiadomości Mr M Zadanie T1 Zadanie T2 Send( T2, M, Mr ) Receive(M ) Reply(Mr) Implementacja spotkania
 Receive(M ) Reply(Mr) Implementacja spotkania.")
96
Depozyty (Proxy) DEPOZYT Proces Widomość
 DEPOZYT Proces Widomość")
97
Sygnały

98
Automatyczne przekazanie wiadomości przez połączenie
Komunikacja w sieci P VQ Send ( ) ZAD VP Q Receive ( ) Zadania wirtualne Węzeł sieci Automatyczne przekazanie wiadomości przez połączenie
 ZAD. VP. Q. Receive ( ) Zadania wirtualne. Węzeł sieci. Automatyczne przekazanie wiadomości przez połączenie.")
99
QNX Neutrino Ochrona pamięci System plików Obsługa we-wy Aplikacja
Podsystem graficzny Mikrojądro NEUTRINO Ochrona pamięci Procedury obsługi urządzeń Procedury obsługi sieci Procedury obsługi grafiki SPRZĘT

100
Zastosowanie

101
Standard POSIX

102
Standard POSIX

103
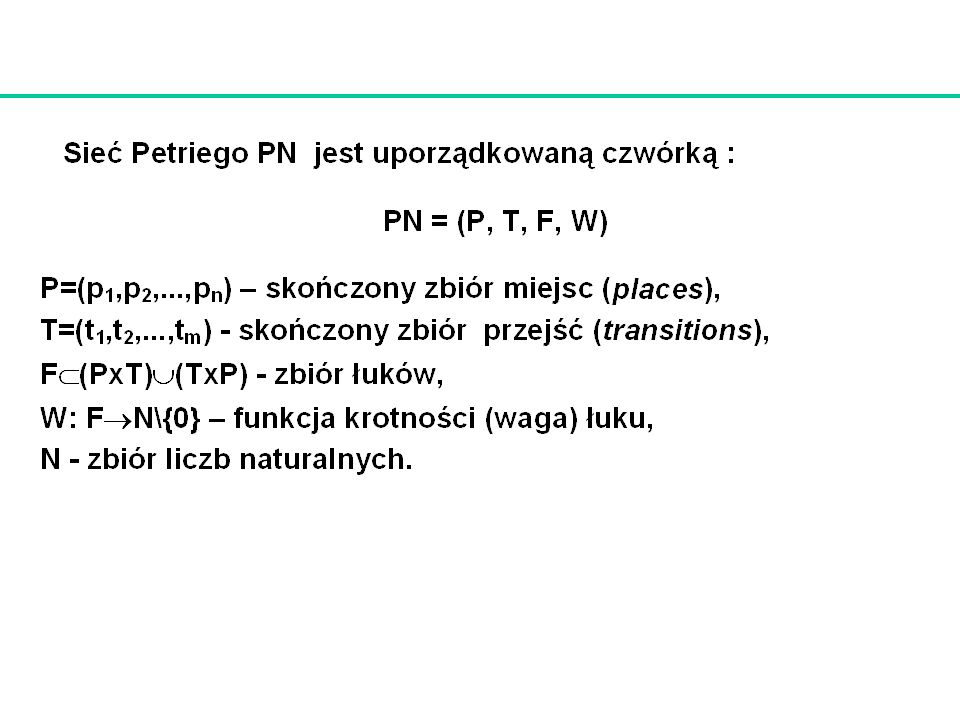
Sieci Petriego

104
Konwencje graficzne p1 p2 p3 t2 t1

106
Znakowanie sieci.

107
Realizacja przejścia t1 p1 p2 p4 p3 p5 3 2

108
Własności dynamiczne sieci

109
Czasowe sieci Petriego

110
Interpretacja miejsc i przejść

111
Model automatu obsługującego sprzedaż
wait 5 10 15 20

112
Model procesów współbieżnych
ParBegin t1 p2 ParEnd p1 p3 p4 t2 t0 t3 p0

113
Model protokołu z potwierdzeniem
Received Receive Sender Receiver Mess_Buff Ack_Buff Ready Wait for ack Send ack mess

114
Komunikacja za pomocą ograniczonego bufora
producer consumer p k p’

115
Synchronizowany dostęp do obszaru krytycznego
p0 t1 t3 p2 p4 t2 t4

116
Sieciowy model procesu cyklicznego
Czasowy znakowany graf TMG (Timed Marked Graph): pP p=1 and p=1 pkc proces k tk i pkb tk i + 1 Operacja oki(h) tranzycja tki T Czas wykonania operacji oki(h) czas palenia tranzycji t = T(t)
: pP p=1 and p=1. pkc. proces k. tk i. pkb. tk i + 1. Operacja oki(h) tranzycja tki T. Czas wykonania operacji oki(h) czas palenia tranzycji t = T(t)")
117
Sieciowy model procesu cyklicznego
process k .. p c s

118
Cykliczne procesy współbieżne
process 1 process k process n

119
Czas cyklu Niech będzie sekwencją wzbudzeń
={<ti; si(1), si(2),...,,si(v),...>: tiT} gdzie: si(v) - jest chwilą w której tranzycja ti inicjuje v-te palenie. Liczba C() jest czasem cyklu sieci, jeżeli istnieje sekwencja wzbudzeń ( jest zbiorem możliwych sekwencji wzbudzeń), dla której znakowanie sieci M jest równe znakowaniu początkowemu M0 w chwilach kC(), k=1, 2, ... . C*=C(*)=min {C()}.
, si(2),...,,si(v),...>: tiT} gdzie: si(v) - jest chwilą w której tranzycja ti inicjuje v-te palenie. Liczba C() jest czasem cyklu sieci, jeżeli istnieje sekwencja wzbudzeń ( jest zbiorem możliwych sekwencji wzbudzeń), dla której znakowanie sieci M jest równe znakowaniu początkowemu M0 w chwilach kC(), k=1, 2, C*=C(*)=min {C()}.")
Podobne prezentacje