Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Podział dziedzin: Teoria systemów, teoria sterowania: badanie zachowania w czasie systemów korzystając z modeli systemów Analiza systemów, modelowanie: budowa modeli znajdujących stosowne zastosowanie Dwa zasadnicze podejścia do modelowania: Oparte na znanych teoriach: model jest wyprowadzany ze znanych praw fizyki, chemii itd. wykorzystując znane zasady matematyki (w skrócie: modelowanie teoretyczne, fenomenologiczne) Oparte na pomiarach: model jest budowany z wykorzystaniem mierzonych w systemie sygnałów (w skrócie modelowanie eksperymentalne, behawioralne, identyfikacja)
 Oparte na pomiarach: model jest budowany z wykorzystaniem mierzonych w systemie sygnałów (w skrócie modelowanie eksperymentalne, behawioralne, identyfikacja)")
2
Modelowanie behawioralne Modelowanie fenomenologiczne
Założenia upraszczające Prawa: równania równowagi równania spójności zależności wiążące Model fenomenologiczny (teoretyczny) Struktura Parametry Upraszczanie Uproszczony model fenomenologiczny 1) Struktura 2) Parametry Porównanie Przypadek B Przypadek A Wynikowy model Wiedza aprioryczna o systemie Struktura znana Struktura nieznana Eksperyment Identyfikacja Parametryczna Nieparametryczna Model behawioralny (eksperymentalny) Parametryczny Nieparametryczny Modelowanie fenomenologiczne Podstawowe działania w procesie modelowania A – ścieżka modelowania behawioralnego (eksperymentalnego) B – ścieżka modelowania fenomenologicznego (teoretycznego) B/1 – wykorzystanie działań ścieżki modelowania eksperymentalnego do określenia wartości parametrów A/1, A/2 – wykorzystanie działań ścieżki modelowania teoretycznego do określenia struktury modelu
 Struktura. Parametry. Upraszczanie. Uproszczony model fenomenologiczny. 1) Struktura. 2) Parametry. Porównanie. Przypadek B. Przypadek A. Wynikowy model. Wiedza aprioryczna o systemie. Struktura znana. Struktura nieznana. Eksperyment. Identyfikacja. Parametryczna. Nieparametryczna. Model behawioralny (eksperymentalny) Parametryczny. Nieparametryczny. Modelowanie fenomenologiczne. Podstawowe działania w procesie modelowania. A – ścieżka modelowania behawioralnego (eksperymentalnego) B – ścieżka modelowania fenomenologicznego (teoretycznego) B/1 – wykorzystanie działań ścieżki modelowania eksperymentalnego do określenia wartości parametrów. A/1, A/2 – wykorzystanie działań ścieżki modelowania teoretycznego do określenia struktury modelu.")
3
Działania upraszczające w modelowaniu fenomenologicznym
Cząstkowe równania różniczkowe liniowe Cząstkowe równania różniczkowe nieliniowe Zwyczajne równania różniczkowe nieliniowe, rzędu n Zwyczajne równania różniczkowe liniowe, rzędu n Zwyczajne równania różniczkowe liniowe, rzędu < n Zwyczajne równania różniczkowe nieliniowe, rzędu < n Równania algebraiczne liniowe nieliniowe Linearyzacja Redukcja rzędu Aproksymacja równaniami o parametrach skupionych Przyrównanie pochodnych do zera Punkty wejścia procesu modelowania

4
Różne rodzaje modeli matematycznych
Modelowanie fenomenologiczne behawioralne Prawa fizyczne znane Parametry znane Para-metry nieznane Sygnały mierzalne Reguły fizyczne znane Struktura modelu nieznana Sygnały wejścia/wyjścia mierzalne Założenie struktury modelu Liniowe/nieliniowe równania różniczkowe Równania różniczkowe z estymacją parametrów Modele neuronowo/rozmyte z estymacją parametrów Modele odpowiedzi impulsowej (transmitancje) Sieci neuronowe Różne rodzaje modeli matematycznych
 Sieci neuronowe. Różne rodzaje modeli matematycznych.")
5
Modelowanie teoretyczne Modelowanie eksperymentalne
Cechy modeli fenomenologicznych i behawioralnych Modelowanie teoretyczne Modelowanie eksperymentalne Struktura modelu wynika z praw natury Struktura modelu musi być założona Możliwe modelowanie zachowań w relacji wejście/wyjście jak i zachowań wewnętrznych (stanu) Tylko zachowania w relacji wejście/wyjście mogą być identyfikowane Parametry modeli są dane jako funkcje własności systemu Parametry modeli są tylko „liczbami”, w ogólności nie są znane związki z własnościami systemu Model jest ważny dla całej klasy procesów rozważanego typu i dla różnych warunków operacyjnych Model jest ważny tylko dla badanego systemu i w przyjętych granicach warunków operacyjnych Parametry modelu nie są znane dokładnie Parametry modelu są bardziej dokładne dla badanego systemu i przyjętych warunków operacyjnych Model może być budowany dla systemów nie istniejących Model może być identyfikowany tylko dla istniejącego systemu
 Tylko zachowania w relacji wejście/wyjście mogą być identyfikowane. Parametry modeli są dane jako funkcje własności systemu. Parametry modeli są tylko „liczbami , w ogólności nie są znane związki z własnościami systemu. Model jest ważny dla całej klasy procesów rozważanego typu i dla różnych warunków operacyjnych. Model jest ważny tylko dla badanego systemu i w przyjętych granicach warunków operacyjnych. Parametry modelu nie są znane dokładnie. Parametry modelu są bardziej dokładne dla badanego systemu i przyjętych warunków operacyjnych. Model może być budowany dla systemów nie istniejących. Model może być identyfikowany tylko dla istniejącego systemu.")
6
Modelowanie teoretyczne Modelowanie eksperymentalne
Cechy modeli fenomenologicznych i behawioralnych – c.d. Modelowanie teoretyczne Modelowanie eksperymentalne Wewnętrzne zachowanie systemu musi być znane i opisywalne matematyczne Metody identyfikacji są niezależne od badanego systemu i mogą zatem być stosowane do wielu różnych systemów Modelowanie jest zwykłe przewlekłym procesem zajmującym dużo czasu Modelowanie jest szybkim procesem, jeżeli istnieją stosowne metody identyfikacji Model może być złożony i szczegółowy Rozmiar modelu może być dostosowany do obszaru zastosowania

7
Modele dynamiczne typu white – box, czyli modele fenomenologiczne
Fakt: prawie każdy system rzeczywisty jest systemem dynamicznym Przypadki, kiedy cele modelowania wymagają budowy modeli dynamicznych: chcemy badać w oparciu o model stany przejściowe (nieustalone) systemu; chcemy przeprowadzać w oparciu o model analizę stabilności, obserwowalności, sterowalności; chcemy generować sterowania systemem w oparciu o predykcję wyjść systemu (sterowanie predykcyjne) ………
 systemu; chcemy przeprowadzać w oparciu o model analizę stabilności, obserwowalności, sterowalności; chcemy generować sterowania systemem w oparciu o predykcję wyjść systemu (sterowanie predykcyjne) ………")
8
Propozycja kroków budowy modelu dynamicznego
Krok I: Dokładne określenie systemu, który ma być modelowany i jego wyodrębnienie z otoczenia Krok II: Obmyślenie idealizowanej reprezentacji systemu, której właściwości będą w dostatecznym stopniu zgodne w zakresie interesujących nas cech (wynikających m. in. z celów modelowania) z właściwościami systemu rzeczywistego Krok III: Budowa modelu matematycznego, który będzie opisywał idealizowaną reprezentację systemu
 z właściwościami systemu rzeczywistego. Krok III: Budowa modelu matematycznego, który będzie opisywał idealizowaną reprezentację systemu.")
9
Krok I Wyodrębnienie obiektu Wyodrębnienie obiektu wyraża się wyborem wielkości wejściowych – tych wielkości, którymi otoczenie oddziałuje na obiekt oraz wielkości wyjściowych – tych wielkości, którymi obiekt oddziałuje na otoczenie

10
Idealizowana reprezentacja
Krok II Idealizowana reprezentacja Pod pojęciem idealizowanej reprezentacji rozumiemy utworzony w myśli system, który odpowiada rzeczywistemu pod względem jego istotnych cech wynikających z celów modelowania, ale jest prostszy (idealniejszy) i dlatego łatwiej poddający się analizie Idealizowana reprezentacja obiektu powstaje poprzez przyjęcie szeregu założeń, które w modelowanym obiekcie rzeczywistym są spełnione w określonym stopniu
 i dlatego łatwiej poddający się analizie. Idealizowana reprezentacja obiektu powstaje poprzez przyjęcie szeregu założeń, które w modelowanym obiekcie rzeczywistym są spełnione w określonym stopniu.")
11
Krok III Budowa modelu (struktury) w oparciu o: Wykorzystanie praw zachowania lub innych podstawowych praw o charakterze bilansowym (np. prawa Kirchhoff’a, Newtona, zachowania masy, itd..) zasadę najmniejszego działania, zwaną często zasadą Hamiltona
 zasadę najmniejszego działania, zwaną często zasadą Hamiltona.")
12
Wyprowadzenie równań modelu poprzedzamy:
właściwym wyborem zmiennych, które będą opisywać chwilowy stan systemu Zmienne modelu dogodnie jest podzielić na zmienne: przepływu, naporu Zmienne przepływu są zmiennymi systemu, które wyrażają intensywność przepływu określonej wielkości przez element systemu, bądź szybkość zmian w czasie określonej wielkości Zmienne naporu są zmiennymi systemu, które są miarą różnicy stanów na dwóch końcach elementu systemu, wyrażają „napór” jakiemu poddany jest element

13
Centralne zagadnienie wyprowadzenia równań dynamiki
Sformułowanie zależności (równań) wyrażających warunki równowagi , poprzez podanie bilansów wielkości właściwych dla rozważanego systemu, które muszą zachodzić dla całego systemu i jego podsystemów lub zależności (równań) wyrażających warunki spójności dynamiki, które muszą zachodzić pomiędzy elementami systemu ze względu na sposób w jaki elementy te łączą się ze sobą
 wyrażających warunki równowagi , poprzez podanie bilansów wielkości właściwych dla rozważanego systemu, które muszą zachodzić dla całego systemu i jego podsystemów. lub. zależności (równań) wyrażających warunki spójności dynamiki, które muszą zachodzić pomiędzy elementami systemu ze względu na sposób w jaki elementy te łączą się ze sobą.")
14
Zależności równowagi są zawsze zależnościami pomiędzy zmiennymi przepływu i nazywane są czasem zależnościami dla węzłów lub zależnościami ciągłości (I prawo Kirchhoff’a, równanie ciągłości strugi, równanie sił w węźle, ...) Zależności spójności są zawsze zależnościami pomiędzy zmiennymi spadku (II prawo Kirchhoff’a, spadek ciśnienia na połączonych kolejno odcinkach rurociągu, ...)
")
15
Po wyprowadzeniu równań wynikających z praw zachowania rozwijamy (uszczegóławiamy) je
przez uwzględnienie w nich zależności wiążących wielkości związane z poszczególnymi elementami systemu Zależności wiążące są zależnościami pomiędzy zmiennymi przepływu i spadku dla każdego poszczególnego elementu systemu (np. , ) Uwzględniamy również - przyjęte założenia - występujące w systemie tożsamości
 Uwzględniamy również. - przyjęte założenia. - występujące w systemie tożsamości.")
16
Systematyczny porządek:
wybór zmiennych; zestawienie równań równowagi lub spójności; uwzględnienie zależności wiążących, założeń, tożsamości a wynikowe równania zestawiamy w układ, w którym pozostawiamy jedynie wybrane przez nas zmienne niezależne i zależne

17
Przykłady modelowania fenomenologicznego (teoretycznego)
Zawory regulacyjne Pomiar poziomu Pomiar temperatury Mieszadło Pole przekroju otwarcia zaworu Av Zbiornik L Zbiornik R - Pole powierzchni przekroju obydwu zbiorników A - Idealne mieszanie w zbiornikach

18
- Równania układu pomiarowego
kh, kt – wzmocnienia przetworników pomiarowych - Obydwa zawory mają takie same charakterystyki przepływu i przyjmujemy, że ka – współczynniki przepływu - Prawo zachowania masy dla zbiorników L i R

19
- Energia cieplna zgromadzona w objętości zbiorników
T0 - temperatura odniesienia, możemy przyjąć T0 = 0, wówczas ρ, c – odpowiednio gęstość i ciepło właściwe wody - Dla przepływu przez kryzę – otwór przyjmiemy, że słuszna jest zależność pierwiastkowa ∆P - spadek ciśnienia na kryzie – otworze, Cd - stały współczynnik strat, Ao – pole powierzchni kryzy - otworu

20
- Ciśnienie hydrostatyczne cieczy na poziomie H poniżej powierzchni
Pa - ciśnienie atmosferyczne - Wypływ ze zbiornika R gdzie - Przepływ między zbiornikami L i R przy założeniu: H1 > H2

21
- Zasada zachowania energii dla zbiornika L i R
- Dzieląc przez ρc i różniczkując - Podstawiając oraz

22
Całościowy model:

23
Schemat blokowy

24
Zmienne modelu: - Naturalny wybór zmiennych stanu – wyjścia integratorów - Zakłócenia – pole powierzchni otworu zaworu wypływowego ze zbiornika R, temperatury wody dopływającej - Sterowania – napięcia siłowników zaworów dopływów do zbiornika R Zmienne stanu: Zmienne sterowania: Zmienne zakłócenia: Zmienne wyjścia:

25
Równania stanu: Równania wyjścia:

26
Równania stanu nieliniowe:
Linearyzacja w otoczeniu stacjonarnego punktu pracy: Dla naszego przykładu: 4 równania – 9 zmiennych !

27
Jeżeli przyjąć np. wartości zmiennych sterowania i zmiennych zakłócenia
Sterowania mogą zmieniać się w zakresie 0 – 10 V; Przyjmijmy: Przyjmijmy: Otrzymamy:

28
- Linearyzacja – zmienne przyrostowe w otoczeniu stacjonarnego punktu pracy:
- Linearyzacja – rozwinięcie w szereg Taylor’a w otoczeniu stacjonarnego punktu pracy:

29
- Linearyzacja – jakobiany w stacjonarnym punkcie pracy równania stanu:

30
- Linearyzacja – zlinearyzowane równanie stanu
- Linearyzacja – jakobiany w stacjonarnym punkcie pracy równania wyjścia - Linearyzacja – zlinearyzowane równanie wyjścia

31
Dla naszego przykładu

32
Dla danych

33
Otrzymamy

34
Zlinearyzowany model przestrzeni stanu
Ogólny schemat blokowy liniowego modelu przestrzeni stanu - ciągłego

35
Modele liniowe – modele przestrzeni stanu z transmitancji
Postać kanoniczna sterowalności (sterownika, regulatora) Transmitancja dana w postaci - wykonujemy pierwszy krok dzielenia wielomianów licznika i mianownika transmitancji - wprowadzamy zmienną pomocniczą
 Transmitancja dana w postaci. - wykonujemy pierwszy krok dzielenia wielomianów licznika i mianownika transmitancji. - wprowadzamy zmienną pomocniczą.")
36
otrzymujemy - definiujemy zmienne stanu w dziedzinie zmiennej s - mnożymy każde z definicyjnych wyrażeń przez s i podstawiamy zmienne stanu w prawej stronie wyrażeń

37
- wykonujemy odwrotne przekształcenie Laplace’a ostatnich wyrażeń i wyrażenia na snV(s)
- równanie stanu w postaci macierzowej

38
- wykonujemy odwrotne przekształcenie Laplace’a na równaniu
otrzymujemy - równanie wyjścia Uwagi: - terminologiczna: stopień licznika transmitancji = stopień mianownika transmitancji, mówimy transmitancja jest właściwa, system dynamiczny jest właściwy - terminologiczna: stopień licznika transmitancji < stopień mianownika transmitancji, mówimy transmitancja jest ściśle właściwa, system dynamiczny jest ściśle właściwy

39
Uwagi c.d.: - macierz D – bezpośredniego sterowania pojawia się w modelu przestrzeni stanu tylko dla systemów właściwych; dla systemów ściśle właściwych macierz D nie występuje w modelu przestrzeni stanu - postać kanoniczna sterowalności jest bardzo efektywna w sensie liczby elementów niezerowych macierzy modelu - poza zerami i jedynkami elementy macierzy są takie same jak elementy transmitancji

40
Schemat blokowy postaci kanonicznej sterowalności systemu SISO

41
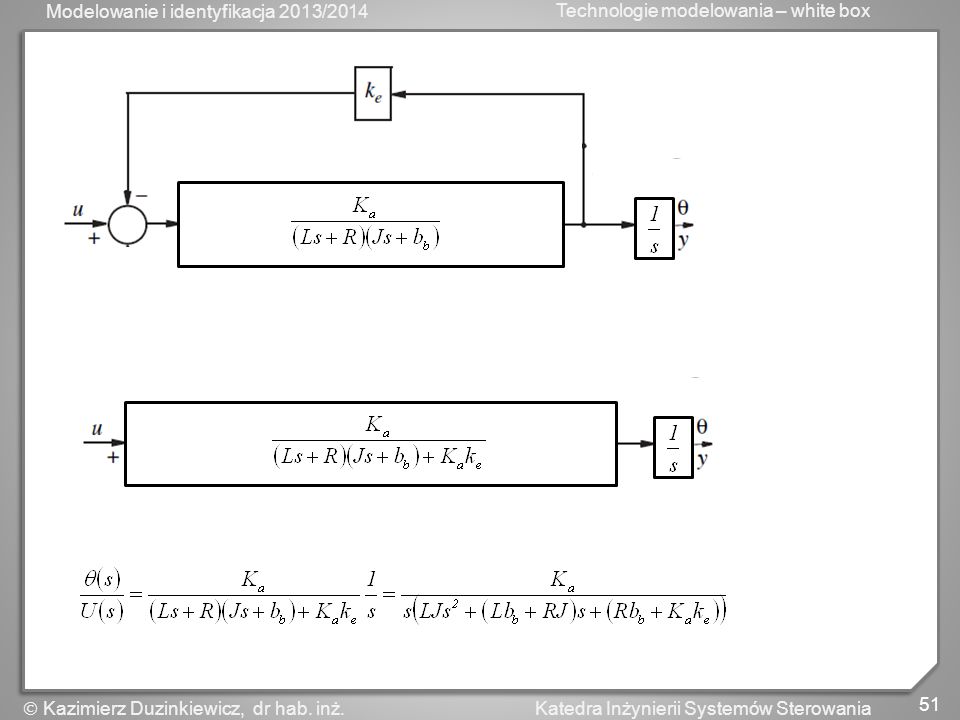
Przykład – silnik prądu stałego
Transmitancja w torze droga kątowa - napięcie Dla danych

42
Schemat blokowy postaci kanonicznej sterowalności
Natura fizyczna zmiennych stanu w przykładzie? Odpowiedź - jak powstawał model silnika

43
Przykład 3 – model silnika PS z obciążeniem inercyjnym przez elastyczny wał

44
- z II zasady dynamiki Newtona
Konwencja: - z II prawa Kirchhoff’a lub

45
Schemat blokowy analogowy modelu silnika PS
1 wejście: 5 zmiennych stanu: , , , , 1 wyjście:

46
Zmienne modelu: - zmienne stanu - zmienna wyjścia Równania stanu:

47
Równania stanu w postaci macierzowej:
Równanie wyjścia: Równania wyjścia w postaci macierzowej:

48
Przykład 4 – model silnika PS z obciążeniem inercyjnym przez sztywny wał
Teraz Schemat blokowy analogowy modelu silnika PS

49
Zmienne modelu: - zmienne stanu - zmienna wyjścia Równania stanu w postaci macierzowej: Równanie wyjścia: Równania wyjścia w postaci macierzowej:

50
Transmitancja:

52
Przykład 5 – model małego silnika PS z obciążeniem inercyjnym przez sztywny wał
Model podsystemu elektrycznego Model podsystemu mechanicznego bez zmian Zmienne modelu: - zmienne stanu - zmienna wyjścia

53
Schemat blokowy analogowy modelu silnika PS
Równania stanu w postaci macierzowej: Równania wyjścia w postaci macierzowej:

54
Postać kanoniczna obserwowalności
Transmitancja dana w postaci - wykonujemy pierwszy krok dzielenia wielomianów licznika i mianownika transmitancji - wprowadzamy zmienną pomocniczą

55
otrzymujemy - definiujemy zmienne stanu w dziedzinie zmiennej s

56
- wykonujemy odwrotne przekształcenie Laplace’a dla ostatnich zależności
- mnożymy przez s - bierzemy pod uwagę otrzymujemy

57
- równanie stanu w postaci macierzowej
- równanie wyjścia w dziedzinie s stąd - równanie wyjścia w postaci macierzowej

58
Schemat blokowy postaci kanonicznej obserwowalności systemu SISO

59
Przekształcenia podobieństwa
gdzie, P – nieosobliwa macierz stałych (liczbowa) o wymiarze nxn Korzystając z przekształcenia podobieństwa możemy znaleźć model systemu wyrażony z użyciem nowych zmiennych stanu Możemy napisać: Mnożąc pierwsze równania lewostronnie przez P:
 o wymiarze nxn. Korzystając z przekształcenia podobieństwa możemy znaleźć model systemu wyrażony z użyciem nowych zmiennych stanu. Możemy napisać: Mnożąc pierwsze równania lewostronnie przez P:")
60
Nowa postać: gdzie, Szczególne przekształcenie podobieństwa – związane z wartościami własnymi, wektorami własnymi macierzy A (lub AD)
")
61
Równanie charakterystyczne dla modelu systemu po transformacji podobieństwa
Wniosek: macierze A i At mają takie same wartości własne Macierze tranzycji a przekształcenia podobieństwa: - system ciągły:

62
- system dyskretny:

63
Przypadek 1: macierz A ma n różnych wartości własnych rzeczywistych
n różnym wartościom własnym odpowiada n liniowo niezależnych wektorów własnych vi Związek wartości własnych i wektorów własnych lub

64
Oznaczając diagonalną macierz wartości własnych przez
biorąc pod uwagę: macierz A ma n różnych wartości własnych Wniosek: macierz A może być transformowana do postaci diagonalnej za pomocą transformacji podobieństwa czyli

65
Model systemu po transformacji
gdzie,

66
Model systemu po transformacji dla systemu ciągłego
dla i – tej zmiennej stanu ! zmienne stanu niezależne od siebie (odsprzężone)
")
67
Przypadek 2: macierz A ma wielokrotne wartości własne rzeczywiste
Nie można zagwarantować liniowej niezależności wektorów własnych i wówczas macierz M może być osobliwa Postępowanie Jordana dla znalezienia n liniowo niezależnych wektorów własnych Niech wartość własna jest wielokrotna razy - definiujemy wektory rekursywnie przyjmując Tak znalezione wektory własne są nazywane uogólnionymi wektorami własnymi i są liniowo niezależne

68
- uogólnione wektory własne tworzą zbiór liniowo niezależnych wektorów
gdzie, l jest liczbą różnych wartości własnych oraz - zachodzi gdzie, Macierz blokowo-diagonalna, macierz Jordana Blok (klatka) Jordana
 Jordana.")
69
Przypadek 3: macierz A ma wartości własne zespolone
Załóżmy, bez utraty ogólności Odpowiadające wektory własne, tez zespolone sprzężone Macierz transformacji Postać kanoniczna Jordana po transformacji

70
Przykład 6 Dany jest model systemu Znaleźć model systemu wykorzystując macierz diagonalizującą wektorów własnych Równanie charakterystyczne

71
Wartości własne Wektor własny dla Stąd i

72
Rozwiązanie np. Podobnie Macierz diagonalizująca i odwrotna do niej

73
Przekształcenie podobieństwa daje nowy model przestrzeni stanu
gdzie, Związki pomiędzy zmiennymi stanu Sprawdzić, że zmiana zmiennych stanu nie prowadzi do zmiany transmitancji

74
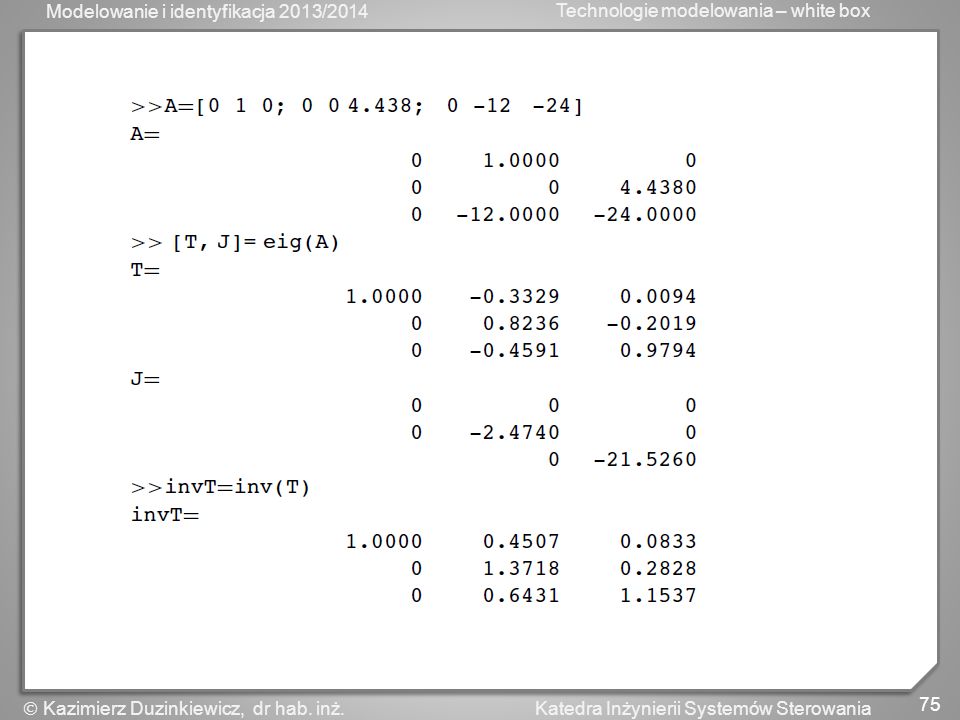
Przykład 7 – model małego silnika PS
Korzystając z środowiska Matlab/Simulink znajdziemy wartości własne, wektory własne i macierz diagonalizującej transformacji podobieństwa

76
Macierze modelu po diagonalizującej transformacji podobieństwa

77
Przykład 8 Wartości własne Dwukrotna wartość własna

78
Ponieważ istnieje tylko jeden wektor własny związany z Korzystając a Matlab’a możemy policzyć niezależne wektory własne Uogólniony wektor własny

79
Macierz transformacji
Macierze modelu po diagonalizującej transformacji podobieństwa

80
Przykład 9 Wartości własne Korzystając a Matlab’a możemy policzyć niezależne wektory własne

81
Macierz transformacji
Macierze modelu po diagonalizującej transformacji podobieństwa

82
– koniec materiału prezentowanego podczas wykładu
Dziękuję – koniec materiału prezentowanego podczas wykładu

Podobne prezentacje



>")







 strugi v=0,>")


 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")




