Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

2
Prognozowanie parametrów ruchu obrotowego Ziemi różnymi metodami Wiesław Kosek Seminarium ZGP Warszawa, 4 czerwiec 2004 r.

3
Transformacja pomiędzy TRS i CRS Q(t) ruch niebieskiego bieguna w systemie niebieskim R(t) rotacja Ziemi wokół osi biegunowej W(t) rotacja uwzględniająca ruch bieguna
 ruch niebieskiego bieguna w systemie niebieskim R(t) rotacja Ziemi wokół osi biegunowej W(t) rotacja uwzględniająca ruch bieguna")
4
Od 22 maja 2001 metoda prognozy współrzędnych x, y bieguna ziemskiego jest ekstrapolacją modelu najmniejszych kwadratów kołowej oscylacji Chandlera i dwóch eliptycznych rocznej i półrocznej. Model ten dopasowany jest do 400 dni danych x - iy i ekstrapolowany na 1 rok (McCarthy & Luzum 1991). Od 14 sierpnia 2001 prognoza UT1-UTC wyznaczana jest metodą filtru Kalmana z uwzględnieniem składowej osiowej momentu pędu atmosfery EAAM NCEP/NCAR (Johnson, Luzum & Ray 2002). Obecna prognoza ψ, ε jest ekstrapolacją modelu KSV_1996_3 (McCarthy 1996) ψ, ε Prognoza x, y, UT1-UTC, ψ, ε wyznaczana przez IERS Rapid/Service Prediction Center w USNO
. Od 14 sierpnia 2001 prognoza UT1-UTC wyznaczana jest metodą filtru Kalmana z uwzględnieniem składowej osiowej momentu pędu atmosfery EAAM NCEP/NCAR (Johnson, Luzum & Ray 2002). Obecna prognoza ψ, ε jest ekstrapolacją modelu KSV_1996_3 (McCarthy 1996) ψ, ε Prognoza x, y, UT1-UTC, ψ, ε wyznaczana przez IERS Rapid/Service Prediction Center w USNO.")
5
DANE: EOPC01 (1846 - 2000), EOPC04 (1962 - 2004.34), USNO (1976 - 2004.34) EOPC04 EOPC01 EOPC04
, EOPC04 ( ), USNO ( ) EOPC04 EOPC01 EOPC04")
7
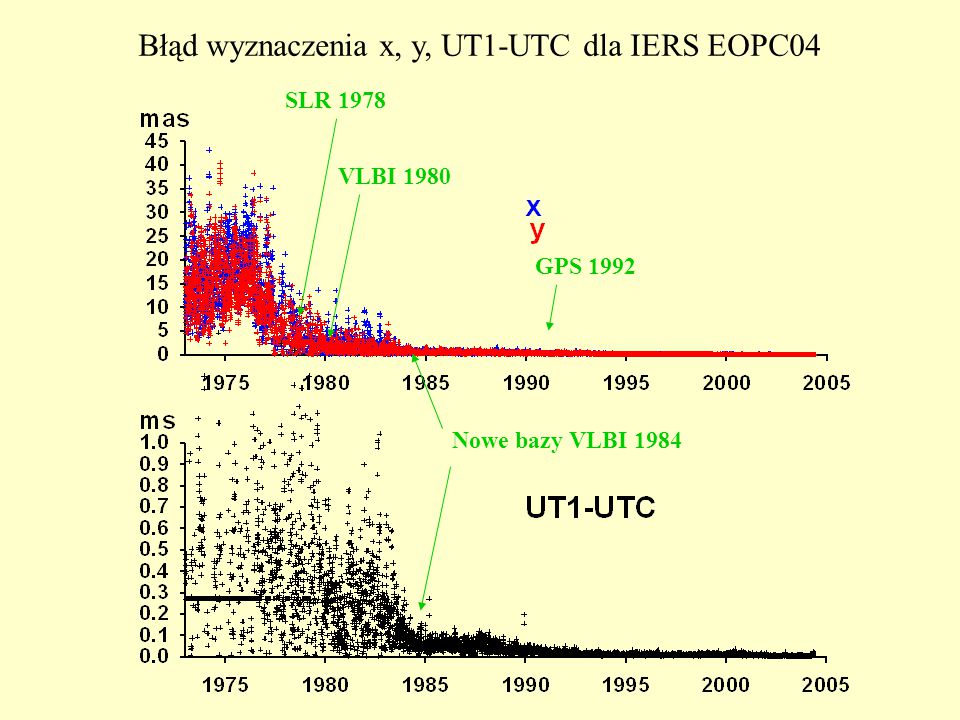
Błąd wyznaczenia x, y, UT1-UTC dla IERS EOPC04 SLR 1978 VLBI 1980 GPS 1992 Nowe bazy VLBI 1984

8
Błąd wyznaczenia x, y, UT1-UTC dla IERS EOPC04

9
Stosunek błędu prognozy do błędu wyznaczenia x, y, UT1-UTC w roku 2000 Dni w przyszłości 1720406080120160320 x, y [mas] 0.52.76.310.614.217.221.824.831.8 UT1-UTC [ms] 0.120.73.66.910.113.120.032.067.0 Stosunek błędu prognozy do błędu wyznaczenia EOP ~7 ~10 ~36 ~58 ~85 ~300 ~140 ~580 ~ 190 ~ 840 ~ 230 ~1100 ~ 290 ~1700 ~ 340 ~2700 ~ 430 ~5600 19761980198419881992199620002004 x [mas]16.32.60.720.530.290.120.0740.058 y [mas]14.31.50.600.470.290.150.0740.060 UT1 [ms] 0.4060.2380.0690.0440.0160.0100.0120.006 Błąd wyznaczenia x, y, UT1-UTC w poszczególnych latach dla EOPC04 Błąd prognozy ψ, ε dla modelu ekstrapolacji KSV_1996_3 (McCarthy 1996) w roku 2001 wynosił odpowiednio 0.14 i 0.12 mas niezależnie od długości prognozy ~2.8 mm~1.8 mm
![Stosunek błędu prognozy do błędu wyznaczenia x, y, UT1-UTC w roku 2000 Dni w przyszłości x, y [mas] UT1-UTC [ms] Stosunek błędu prognozy do błędu wyznaczenia EOP ~7 ~10 ~36 ~58 ~85 ~300 ~140 ~580 ~ 190 ~ 840 ~ 230 ~1100 ~ 290 ~1700 ~ 340 ~2700 ~ 430 ~ x [mas] y [mas] UT1 [ms] Błąd wyznaczenia x, y, UT1-UTC w poszczególnych latach dla EOPC04 Błąd prognozy ψ, ε dla modelu ekstrapolacji KSV_1996_3 (McCarthy 1996) w roku 2001 wynosił odpowiednio 0.14 i 0.12 mas niezależnie od długości prognozy ~2.8 mm~1.8 mm](http://images.slideplayer.pl/17/5353356/slides/slide_9.jpg "Stosunek błędu prognozy do błędu wyznaczenia x, y, UT1-UTC w roku 2000 Dni w przyszłości x, y [mas] UT1-UTC [ms] Stosunek błędu prognozy do błędu wyznaczenia EOP ~7 ~10 ~36 ~58 ~85 ~300 ~140 ~580 ~ 190 ~ 840 ~ 230 ~1100 ~ 290 ~1700 ~ 340 ~2700 ~ 430 ~ x [mas] y [mas] UT1 [ms] Błąd wyznaczenia x, y, UT1-UTC w poszczególnych latach dla EOPC04 Błąd prognozy ψ, ε dla modelu ekstrapolacji KSV_1996_3 (McCarthy 1996) w roku 2001 wynosił odpowiednio 0.14 i 0.12 mas niezależnie od długości prognozy ~2.8 mm~1.8 mm")
10
a ij - całkowite mnożniki j (l, l’, F, D i argumenty nutacji lunisolarnej a ij, B i, C i, B i ’, C i ’ parametry modelu UT1-UTC UT1-TAI LOD UT1-TAI - UT1 LOD - LOD leap seconds Model pływowy IERS Conventions 2003 Deformacje pływowe UT1-UTC i LOD

12
Czynniki wpływające na dokładność prognozy EOP 1) nieregularne oscylacje krótkookresowe
 nieregularne oscylacje krótkookresowe")
13
Czynniki wpływające na dokładność prognozy x, y 2) Nieregularne zmiany fazy oscylacji rocznej 3) Nieregularne zmiany amplitudy oscylacji rocznej i Chandlera
 Nieregularne zmiany fazy oscylacji rocznej 3) Nieregularne zmiany amplitudy oscylacji rocznej i Chandlera")
14
współczynnik korelacji 0.654 Zależność pomiędzy fazą oscylacji rocznej a amplitudą oscylacji Chandlera

15
Sposoby prognozowania x, y W Kartezjańskim układzie współrzędnych W biegunowym układzie współrzędnych poprzez wyznaczenie prognozy bieguna średniego, promienia i długości łuku polhodii, a następnie transformacji tej prognozy do układu Kartezjańskiego poprzez zastosowanie liniowego wcięcia w przód.

16
Zastosowane metody prognozowania: 1) Least-squares (LS) 2) Autocovariance (AC) ( Kosek 1997 ) 3) Autoregressive (AR) ( Barrodale I. and Erickson R. E., 1980; Brzeziński 1995 ) 4) Autoregressive moving average (ARMA) ( Box & Jenkins 1974 ) 5) Neural networks (NN) 6) Kombinacje metody LS z metodami stochastycznymi : AR, ARMA, AC i NN.
 4) Autoregressive moving average (ARMA) ( Box & Jenkins 1974 ) 5) Neural networks (NN) 6) Kombinacje metody LS z metodami stochastycznymi : AR, ARMA, AC i NN..")
17
PROGNOZOWANIE METODĄ AUTOKOWARIANCYJNĄ (Kosek 1997) - stacjonarny zespolony proces stochastyczny
 - stacjonarny zespolony proces stochastyczny")
18
PROGNOZOWANIE METODĄ AUTOREGRESJI (Box-Jenkins 1974) Rząd autoregresji: Współczynniki autoregresji:
 Rząd autoregresji: Współczynniki autoregresji:")
19
PROGNOZOWANIE METODĄ ARMA - część operatora zawierająca tylko dodatnie potęgi B operator przesunięcia wstecz

20
średni biegun PROGNOZOWANIE X, Y W UKŁADZIE WSPÓŁRZĘDNYCH BIEGUNOWYCH

21
Transformacja prognozy promienia i długości łuku polhodii z układu biegunowego do Kartezjańskiego Liniowe wcięcie w przód: Średni biegun

22
ŚREDNI BIEGUN, PROMIEŃ I DŁUGOŚĆ ŁUKU POLHODII

23
Czasowo-częstotliwościowe widma mocy FTBPF promienia i długości łuku polhodii

24
Prognozowanie współrzędnych x, y bieguna ziemskiego w układzie współrzędnych biegunowych kombinacją metody najmniejszych kwadratów z metodami stochastycznymi Współrzędne x, y bieguna ziemskiego R, A model ΔR, ΔA residua ekstrapolacji Prognoza ΔR, ΔA Residuów ekstrapolacji R, A Ekstrapolacja Prediction of R, A AR, ARMA, NN R – promień A – długość łuku Prognoza x, y Średni biegun + prognoza LS Prognoza R, A

25
Średni błąd prognozy x, y, R i L dla metody autokowariancyjnej w układzie współrzędnych biegunowych oraz x, y USNO w latach 1984.0-2004.34

26
Średni błąd prognozy x, y, R, A, L w latach 1984-2004.34 dla metody autokowariancyjnej (AC) oraz kombinacji metody najmniejszych kwadratów i autoregresji (LS+AR) w układzie współrzędnych biegunowych. AC LS+AR

27
Absolutna wartość różnicy pomiędzy współrzędnymi x, y bieguna ziemskiego promieniem R i scałkowaną długością łuku polhodii L a ich prognozą wyznaczoną metoda autokowariancyjną w układzie współrzędnych biegunowych

28
Absolutna wartość różnicy pomiędzy współrzędnymi x, y bieguna ziemskiego a ich prognozą wyznaczoną metodą autokowariancyjną w układzie współrzędnych biegunowych oraz w USNO

29
Prognoza x – iy, LOD kombinacją metody najmniejszych kwadratów z metodami stochastycznymi Δx - iΔy, ΔLOD* Residua Ekstrapolacji LS Prognoza residuów ekstrapolacji Δx - i Δy, ΔLOD* Ekstrapolacja LS x - iy, LOD* Prognoza x - iy, LOD* AC, AR, ARMA, NN x - iy, LOD* x - iy, LOD* model

30
Współczynniki autoregresji wyznaczone ze współrzędnych bieguna ziemskiego w przedziałach ośmioletnich M=30

31
Średni błąd prognozy współrzędnych x, y bieguna ziemskiego w latach 1984.0-2004.34 wyznaczony metodami LS, ARMA, AR oraz kombinacją metody LS z metodami stochastycznymi

32
Średni błąd prognozy zmian długości doby LOD w latach 1984.0-2004.34 wyznaczony kombinacją metody LS z metodami stochastycznymi

33
Średni błąd prognozy UT1-UTC w latach 1984.0-2004.34 wyznaczony kombinacją metody LS z metodami stochastycznymi

34
Absolutna wartość różnicy pomiędzy współrzędną x bieguna ziemskiego a jej prognozą wyznaczoną w USNO oraz kombinacją metod LS+AC, LS+ARMA i LS+AR

35
Absolutna wartość różnicy pomiędzy współrzędną y bieguna ziemskiego a jej prognozą wyznaczoną w USNO oraz kombinacją metod LS+AC, LS+ARMA i LS+AR

36
Absolutna wartość różnicy pomiędzy UT1-UTC a prognozą wyznaczoną kombinacją metod LS+AR, LS+ARMA, LS+AC i LS+NN

37
Prognozy współrzędnych x, y bieguna ziemskiego wyznaczone 3.06.2004 o godz. 20 w USNO oraz metodą LS+AR MJD=53139

38
Prognozy współrzędnych x, y bieguna ziemskiego wyznaczone 3.06.2004 o godz. 20 w USNO oraz metodą LS+AR

39
Średni i zmienny w czasie błąd prognozy ARMA zmian TEC (Borowiec)
")
40
Wnioski Średnie błędy prognozy współrzędnych x, y bieguna ziemskiego do około 60 dni w przyszłości dla metody najmniejszych kwadratów stosowanej w USNO i metody autokowariancyjnej w układzie współrzędnych biegunowych są tego samego rzędu. Problemem prognozowania w układzie współrzędnych biegunowych jest mało dokładna prognoza scałkowanej długości łuku polhodii. Dokładność prognozy współrzędnych x, y bieguna ziemskiego metodami LS+AR i LS+ARMA jest wyższa niż dla obecnie stosowanej metody prognozowania IERS Rapid Service/Predictions Center. Dokładność prognozy UT1-UTC metodami LS+AR, LS+ARMA do około 100 dni w przyszłości jest tego samego rzędu co dla metody prognozowania IERS Rapid Service/Predictions Center. Przedstawione metody prognozowania mogą być zastosowane do przewidywania innych geofizycznych szeregów czasowych.

Podobne prezentacje




















 Tomasz Niedzielski.>")