Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
PROJEKT GRUPOWY SYSTEM ANTYKOLIZYJNY DLA ROBOTÓW PRZEMYSŁOWYCH Grupa: P. Bocian K. Czułkowski A. Hryniewicz opiekun: mgr inż. Piotr Fiertek

2
PLAN PREZENTACJI Założenia projektowe Wybrane technologie Zadania do zrealizowania Dotychczasowe osiągnięcia Analiza ryzyka w projekcie

3
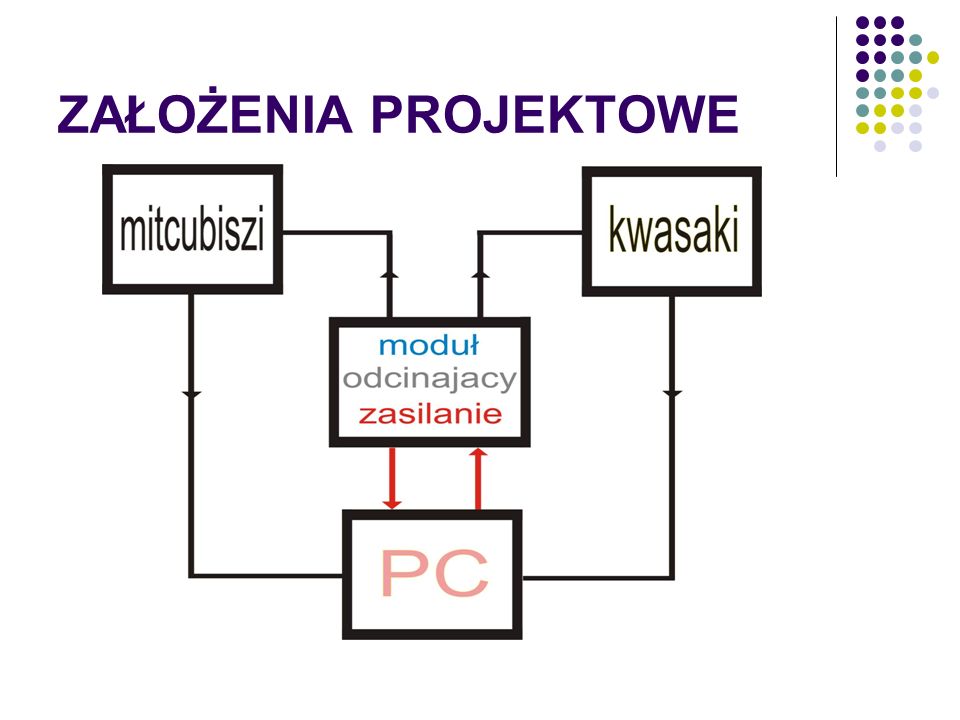
ZAŁOŻENIA PROJEKTOWE

5
SOFTWARE: Aplikacja realizująca wczytanie modeli robotów oraz otoczenia, tworząca ich matematyczne modele i dokonująca detekcji kolizji. HARDWARE Realizacja modułu odcinającego zasilanie r.p. w przypadku w.k przez a.d.n.k.k.pc, który będzie dołączony do szafy sterowniczej robotów.

6
Wybrane technologie INTER KOMUNIKACYJNY RS232 prostsza realizacja (tańszy układ) potrzebna przejściówka USB-RS powoli wychodzi z użycia TCP/IP ujednolicenie interfejsów w laboratorium, pozostałe moduły komunikują się przez TCP
 potrzebna przejściówka USB-RS powoli wychodzi z użycia TCP/IP ujednolicenie interfejsów w laboratorium, pozostałe moduły komunikują się przez TCP")
7
Wybrane technologie JĘZYK PROGRAMOWANIA C++ szybsze działanie aplikacji duże wsparcie dla OpenGL biblioteki wykrywania kolizji na licencjach OS C# łatwiejsze tworzenie GUI oraz łatwiejsza implementacja niektórych modułów (np. TCP) brak oficjalnego wsparcia dla OpenGL, jest za to Direct3D
 brak oficjalnego wsparcia dla OpenGL, jest za to Direct3D.")
8
SOFTWARE komunikacja z płytką (TCP) komunikacja z robotami (TCP) wczytanie z plików modeli 3D robotów oraz transporterów pomiędzy robotami, stworzenie modeli matematycznych zamodelowanie kinematyki robotów estymacja położenia robotów i wykrywanie kolizji trójwymiarowa wizualizacja
 komunikacja z robotami (TCP) wczytanie z plików modeli 3D robotów oraz transporterów pomiędzy robotami, stworzenie modeli matematycznych zamodelowanie kinematyki robotów estymacja położenia robotów i wykrywanie kolizji trójwymiarowa wizualizacja")
9
HARDWARE układ elektroniczny (mikrosterownik cyfrowy) oparty o mikrokontroler z rodziny AVR: odbieranie komunikatów z PC przez TCP i odcinanie zasilania robotów w przypadku określonego komunikatu lub braku komunikatu (watchdog!) zaprojektowanie płytki - technika projektowania redundancyjnego, wykorzystanie dwóch przekaźników wpiętych w szereg zapewniających pewną pracę układu dodatkowe elementy na płytce (diody sygnalizujące stan układu, złącze do programowania) układ zostanie zamknięty w szafie sterowniczej robotów
 oparty o mikrokontroler z rodziny AVR: odbieranie komunikatów z PC przez TCP i odcinanie zasilania robotów w przypadku określonego komunikatu lub braku komunikatu (watchdog!) zaprojektowanie płytki - technika projektowania redundancyjnego, wykorzystanie dwóch przekaźników wpiętych w szereg zapewniających pewną pracę układu dodatkowe elementy na płytce (diody sygnalizujące stan układu, złącze do programowania) układ zostanie zamknięty w szafie sterowniczej robotów")
10
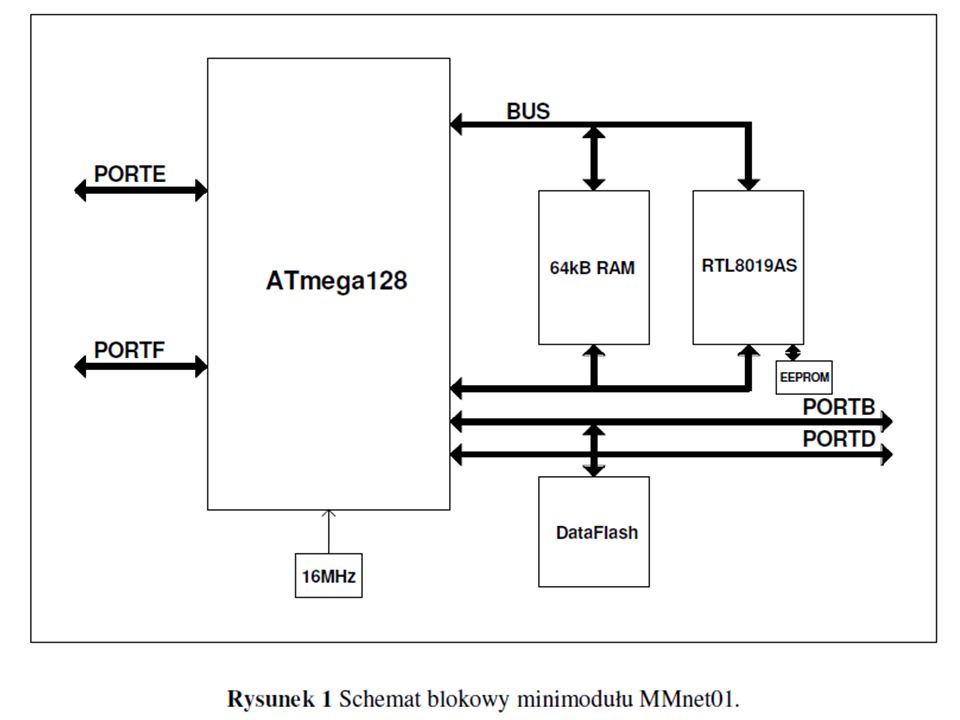
HARDWARE Minimoduł ethernetowy MMnet01

12
HARDWARE MMnet01 - Szybki mikrokontroler RISC ATmega128 o wydajności do 16MIPS - Kontroler ethernetu IEEE 802.3 10/100Mb/s LAN91C111 - 128kB programowanej w systemie pamięci programu typu FLASH - 64KB pamięci RAM - 4kB pamięci EEPROM - Elastyczny kontroler pamięci, pozwala dostosować przestrzeń adresową do potrzeb aplikacji - Zegar czasu rzeczywistego I2C oraz podstawka na baterię litową - Niezawodny układ Resetu - X w nazwie produktu oznacza rezonator kwarcowy, domyślnie 16 MHz - Rezonatory 32.768 Hz dla RTC oraz wewnętrznego timera/licznika procesora - 4 diody LED sygnalizujące: zasilanie, aktywność LAN, aktywność DataFlash - W pełni SMD wykonany na obwodzie czterowarstwowym - 2x32 wyprowadzenia z rastrem 0.1" (2.54mm) pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm
 pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm")
13
HARDWARE MMnet01 - Szybki mikrokontroler RISC ATmega128 o wydajności do 16MIPS - Kontroler ethernetu IEEE 802.3 10/100Mb/s LAN91C111 - 128kB programowanej w systemie pamięci programu typu FLASH - 64KB pamięci RAM - 4kB pamięci EEPROM - Elastyczny kontroler pamięci, pozwala dostosować przestrzeń adresową do potrzeb aplikacji - Zegar czasu rzeczywistego I2C oraz podstawka na baterię litową - Niezawodny układ Resetu - X w nazwie produktu oznacza rezonator kwarcowy, domyślnie 16 MHz - Rezonatory 32.768 Hz dla RTC oraz wewnętrznego timera/licznika procesora - 4 diody LED sygnalizujące: zasilanie, aktywność LAN, aktywność DataFlash - W pełni SMD wykonany na obwodzie czterowarstwowym - 2x32 wyprowadzenia z rastrem 0.1" (2.54mm) pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm jest i działa
 pasujące do wszystkich druków prototypowych - Dostępny darmowy system operacyjny ze stosem TCP/IP i obsługą wielu protokołów - Dostępna płyta ewaluacyjna i przykładowe oprogramowanie - Małe wymiary:56mm x 30.5mm jest i działa")
14
Dotychczasowe osiągnięcia Zapoznanie z normą dotyczącą awaryjnego zatrzymywania maszyn ISO PN-EN 13 850 Intensywna nauka OpenGL, opanowanie API i stworzenie aplikacji wczytującej modele robotów z plików STL demo Sprawy organizacyjne: założenie repozytorium SVN, stworzenie harmonogramu, analiza ryzyka,...

15
O RYZYKU W PROJEKCIE

16
Inżynieria produktu Restrykcje czasowe działania programu. Real-time response, Response time – przyspieszenie obliczeń poprzez zastosowanie C++. Po konsultacjach ze zleceniodawcą dowiedzieliśmy się, iż roboty nie będą działać z pełną szybkością. Trudności w implementacji algorytmów. Możliwość rozbudowy robotów wymaga uniwersalnych algorytmów modyfikujących modele. Algorytmy muszą być bardzo dobrze zaplanowane.

17
Środowisko oraz otoczenie rozwojowe Utrudnienia w integracji prac wykonanych przez członków zespołu, trudna wymiana informacji. Zostało założone repozytorium SVN, z osobnym kontem dla każdego członka zespołu. Zespół został zaznajomiony z podstawowymi zasadami korzystania z tego narzędzia.

18
Ograniczenia programowe Nierealistyczny harmonogram, ze względu na brak doświadczenia w tego typu projektach. W harmonogramie zawarto tylko ogólne ramy projektowe oraz uwzględniono okresy czasu (np. wakacje), w których będzie można nadrobić zaległości. Opóźnienia zewnętrzne – związane z przystosowaniem laboratorium lub zakupem układów przez uczelnię. Wyraźne rozdzielenia części programistycznej i sprzętowej projektu, każda z części może być wykonywana niezależnie.
, w których będzie można nadrobić zaległości. Opóźnienia zewnętrzne – związane z przystosowaniem laboratorium lub zakupem układów przez uczelnię. Wyraźne rozdzielenia części programistycznej i sprzętowej projektu, każda z części może być wykonywana niezależnie..")
19
DZIĘKUJEMY ZA UWAGĘ

Podobne prezentacje





 najważniejsza płyta drukowana urządzenia elektronicznego, na której zamontowano najważniejsze elementy urządzenia,>")













