Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Kryterium Nyquista Cecha charakterystyczna kryterium Nyquist’a
Harry Nyquist (ur. 7 lutego 1889r., Nilsby, Szwecja, zm. 4 kwietnia 1976r. Harlingen, Teksas), elektrotechnik amerykański pochodzenia szwedzkiego. Wieloletni pracownik Bell Telephone Laboratories. Twórca kryterium do badania stabilności układów sterowania. Prowadził prace z automatyki. /Wikipedia/ Cecha charakterystyczna kryterium Nyquist’a Analiza stabilności systemu zamkniętego z ujemnym sprzężeniem zwrotnym prowadzona jest w oparciu charakterystyki częstotliwościowe (wykres Nyquista, wykresy Bode’a) transmitancji systemu otwartego
, elektrotechnik amerykański pochodzenia szwedzkiego. Wieloletni pracownik Bell Telephone Laboratories. Twórca kryterium do badania stabilności układów sterowania. Prowadził prace z automatyki. /Wikipedia/ Cecha charakterystyczna kryterium Nyquist’a. Analiza stabilności systemu zamkniętego z ujemnym sprzężeniem zwrotnym prowadzona jest w oparciu charakterystyki częstotliwościowe (wykres Nyquista, wykresy Bode’a) transmitancji systemu otwartego.")
2
Równanie charakterystyczne układu zamkniętego
Transmitancja układu zamkniętego Transmitancja układu otwartego Równanie charakterystyczne układu zamkniętego Równanie charakterystyczne układu otwartego stabilność układu zamkniętego stabilność układu otwartego

3
Zależności 1. Wielomiany Lo(s) i Mo(s) są względnie pierwsze Niech transmitancja układu otwartego będzie przedstawiona w postaci ułamka wielomianów zmiennej zespolonej s Założymy, że 2. Stopień Lo(s) = m n = Stopień Mo(s) (1) Równanie charakterystyczne układu otwartego (przyrównanie mianownika transmitancji do zera) (2)
 = m n = Stopień Mo(s) (1) Równanie charakterystyczne układu otwartego (przyrównanie mianownika transmitancji do zera) (2)")
4
Transmitancja układu zamkniętego
(3)
")
5
Równanie charakterystyczne układu zamkniętego (przyrównanie mianownika transmitancji do zera)
(4) (5)
 (5)")
6
W oparciu o (1) – (5) z poprzedniego wykładu możemy twierdzić:
1. Zera układu zamkniętego Gz(s) są takie same jak zera układu otwartego Go(s)
 są takie same jak zera układu otwartego Go(s)")
7
2. Bieguny M(s) = 1 + Go(s) są też biegunami transmitancji układu otwartego Go(s),
 = 1 + Go(s) są też biegunami transmitancji układu otwartego Go(s),")
8
3. Zera M(s) = 1 + Go(s) są biegunami transmitancji układu zamkniętego Gz(s), a zatem pierwiastkami równania charakterystycznego układu zamkniętego
 = 1 + Go(s) są biegunami transmitancji układu zamkniętego Gz(s), a zatem pierwiastkami równania charakterystycznego układu zamkniętego.")
9
Kryterium Nyquist’a opiera się na zasadzie argumentu Cauchy’ego związanej z odwzorowaniami zespolonymi Odwzorowanie punktów pomiędzy płaszczyznami zespolonymi

10
Skupimy dalej uwagę na odwzorowaniach postaci
i prześledźmy zagadnienie Odwzorowanie konturów (krzywej zamkniętej) pomiędzy płaszczyznami zespolonymi
 pomiędzy płaszczyznami zespolonymi.")
11
Przyjmiemy konwencję W PRAWO
Odwzorowanie konturów może odbywać się przy przemieszczaniu się po nim punktu s na s - płaszczyźnie 1. w prawo - zgodnie z kierunkiem ruchu wskazówek zegara – ujemna zmiana kąta wektora wodzącego, albo 2. w lewo - przeciwnie do kierunku ruchu wskazówek zegara – dodatnia zmiana kąta wektora wodzącego Przyjmiemy konwencję W PRAWO

12
Punkt obejmowany i okrążany przez kontur
Ponieważ kryterium Nyquist’a jest metodą graficzną należy ustalić rozumienie pewnych związanych z tym pojęć Punkt obejmowany i okrążany przez kontur Obejmowany – Będziemy mówili, że punkt jest obejmowany przez kontur (krzywą zamkniętą), jeżeli znajduje się on wewnątrz tego konturu Punkt A jest obejmowany przez kontur Γ, ponieważ A znajduje się wewnątrz konturu Γ Punkt B nie jest obejmowany przez konturΓ, ponieważ B znajduje się na zewnątrz konturu Γ
, jeżeli znajduje się on wewnątrz tego konturu. Punkt A jest obejmowany przez kontur Γ, ponieważ A znajduje się wewnątrz konturu Γ. Punkt B nie jest obejmowany przez konturΓ, ponieważ B znajduje się na zewnątrz konturu Γ.")
13
Punkt A jest okrążany przez konturem
Okrążany – Będziemy mówili, że punkt lub obszar jest okrążany przez kontur, jeżeli leży on po prawej stronie konturu przy jego przechodzeniu w przypisanym kierunku Punkt A jest okrążany przez konturem

14
Kiedy punkt jest okrążany przez kontur , przypisujemy liczbę N liczbie tych okrążeń
Okrążeniu zgodnemu z ruchem wskazówek zegara przypisuje się wartość -1 Okrążeniu przeciwnemu do ruchu wskazówek zegara przypisuje się wartość 1

15
Określanie liczby okrążeń początku układu współrzędnych G-płaszczyzny

16
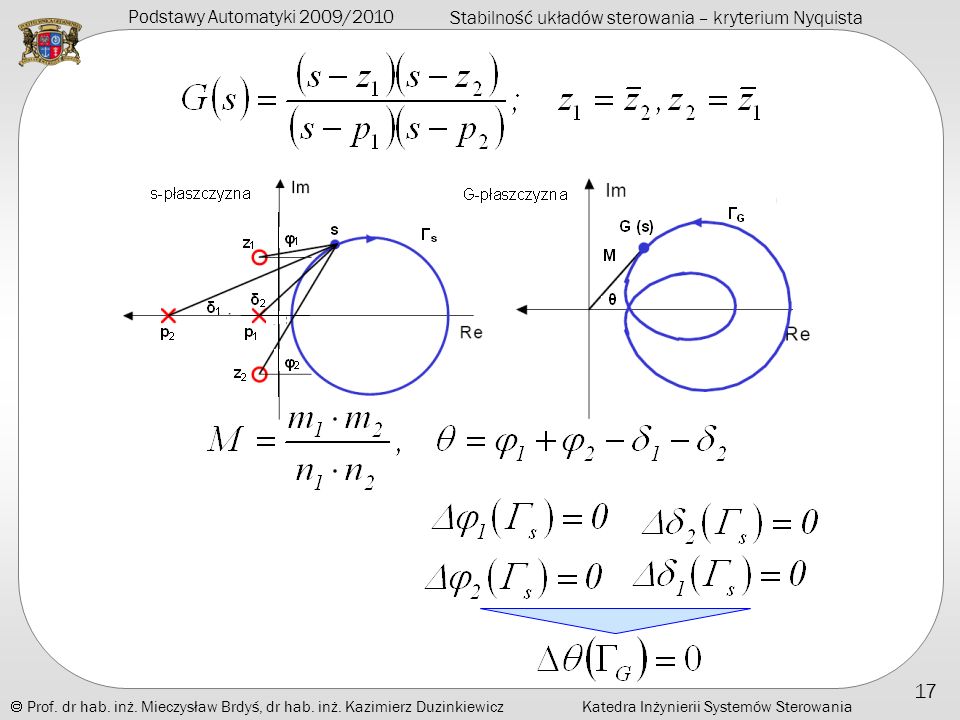
Pytania - przy obieganiu przez s konturu na s-płaszczyźnie w prawo w jakim kierunku będzie obiegał G(s) kontur na G-płaszczyźnie? - jak będzie umiejscowiony kontur na G-płaszczyźnie w zależności od tego, czy kontur na s-płaszczyźnie obejmuje na niej, czy też nie obejmuje jakieś zera lub bieguny odwzorowania G(s)?
")
19
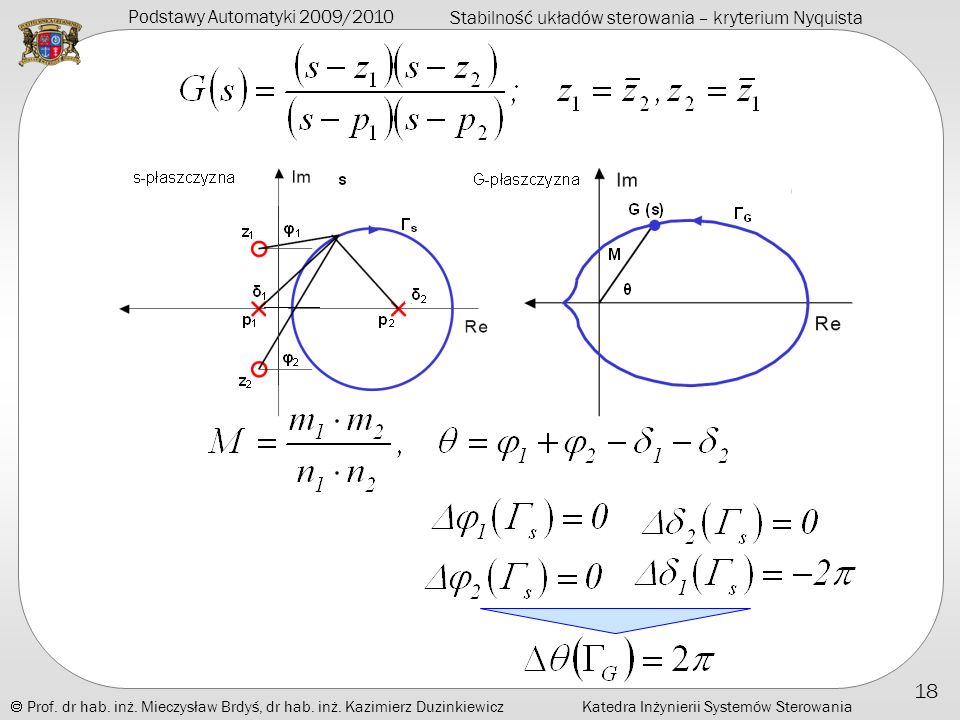
Zachodzi: 1. Kontur ΓG okrąża początek układu współrzędnych G-płaszczyzny wtedy, i tylko wtedy, gdy kontur Γs na s-płaszczyźnie obejmuje na tej płaszczyźnie jakiekolwiek zero lub jakikolwiek biegun odwzorowania G 2a. Jeżeli kontur Γs okrąża raz zgodnie z ruchem wskazówek zegara biegun (P=1) odwzorowania G na s-płaszczyźnie, to kontur ΓG okrąża raz początek układu współrzędnych G-płaszczyzny w kierunku przeciwnym do ruchu wskazówek zegara (N=1), a zatem zmiana fazy odwzorowania G(s) wynosi 2π 2b. Jeżeli kontur Γs okrąża raz zgodnie z ruchem wskazówek zegara zero (Z=1) odwzorowania G na s-płaszczyźnie, to kontur ΓG okrąża raz początek układu współrzędnych G-płaszczyzny w kierunku zgodnym do ruchu wskazówek zegara (N=-1), a zatem zmiana fazy odwzorowania G(s) wynosi -2π
 odwzorowania G na s-płaszczyźnie, to kontur ΓG okrąża raz początek układu współrzędnych G-płaszczyzny w kierunku przeciwnym do ruchu wskazówek zegara (N=1), a zatem zmiana fazy odwzorowania G(s) wynosi 2π. 2b. Jeżeli kontur Γs okrąża raz zgodnie z ruchem wskazówek zegara zero (Z=1) odwzorowania G na s-płaszczyźnie, to kontur ΓG okrąża raz początek układu współrzędnych G-płaszczyzny w kierunku zgodnym do ruchu wskazówek zegara (N=-1), a zatem zmiana fazy odwzorowania G(s) wynosi -2π.")
20
Odkryliśmy zasadę argumentu Cauchy’ego !!!
Uogólnienie: Jeżeli kontur Γs okrąża raz zgodnie z ruchem wskazówek zegara Z zer i P biegunów odwzorowania G na s-płaszczyźnie, to kontur ΓG okrąża początek układu współrzędnych G-płaszczyzny N=P-Z razy, przy czym jeżeli N>0 to w kierunku przeciwnym do ruchu wskazówek zegara, a jeżeli N<0 to w kierunku zgodnym z ruchem wskazówek zegara Odkryliśmy zasadę argumentu Cauchy’ego !!!

21
Kryterium Nyquista bazuje na zasadzie argumentu Cauchy’ego (analiza zespolona)
Niech G(s) będzie funkcją zmiennej zespolonej s, analityczną (różniczkowalną względem zmiennej zespolonej) w pewnym obszarze s-płaszczyzny, co najwyżej z wyjątkiem skończonej liczby punktów. Załóżmy, że pewien kontur Γs został wybrany na s-płaszczyźnie w taki sposób, że wszystkie jego punkty są analityczne. Kontur ΓG uzyskany na F-płaszczyźnie z odwzorowania konturu Γs funkcją G(s), będzie okrążał początek układu współrzędnych G-płaszczyzny tyle razy, ile wynosi różnica liczby biegunów i liczby zer funkcji G(s), które są obejmowane przez kontur Γs N = P - Z gdzie Z jest liczbą zer G(s) obejmowanych przez Γs , P jest liczba biegunów G(s) obejmowanych przez Γs , a N jest liczbą okrążeń przez ΓG początku układu współrzędnych F-płaszczyzny
 będzie funkcją zmiennej zespolonej s, analityczną (różniczkowalną względem zmiennej zespolonej) w pewnym obszarze s-płaszczyzny, co najwyżej z wyjątkiem skończonej liczby punktów. Załóżmy, że pewien kontur Γs został wybrany na s-płaszczyźnie w taki sposób, że wszystkie jego punkty są analityczne. Kontur ΓG uzyskany na F-płaszczyźnie z odwzorowania konturu Γs funkcją G(s), będzie okrążał początek układu współrzędnych G-płaszczyzny tyle razy, ile wynosi różnica liczby biegunów i liczby zer funkcji G(s), które są obejmowane przez kontur Γs. N = P - Z. gdzie Z jest liczbą zer G(s) obejmowanych przez Γs , P jest liczba biegunów G(s) obejmowanych przez Γs , a N jest liczbą okrążeń przez ΓG początku układu współrzędnych F-płaszczyzny.")
22
Jak określić kontur Γs jeżeli interesuje nas badanie stabilności?
Kontur Γs powinien obejmować całą prawą półpłaszczyznę płaszczyzny zmiennej zespolonej s wraz z osią urojoną z wyłączeniem co najwyżej skończonej liczby jej punktów – kontur ten będziemy nazywali konturem Nyquist’a lub D-konturem

23
Kiedy bieguny lub zera układu otwartego leżą w początku układu współrzędnych płaszczyzny s lub na osi urojonej Sposób postępowania (jeden z możliwych) Modyfikujemy kontur Nyquist’a tak, aby obejść biegun lub zero jako położony w lewej półpłaszczyźnie płaszczyzny zmiennej zespolonej s – obchodzimy go półokręgiem o nieskończenie małym promieniu położonym w prawej półpłaszczyźnie
 Modyfikujemy kontur Nyquist’a tak, aby obejść biegun lub zero jako położony w lewej półpłaszczyźnie płaszczyzny zmiennej zespolonej s – obchodzimy go półokręgiem o nieskończenie małym promieniu położonym w prawej półpłaszczyźnie.")
24
Punktem krytycznym staje się punkt (-1, j0) zamiast punktu (0,j0)
Kryterium Nyquista bazuje na odwzorowaniu konturu Nyquista w wykres Nyquista układu otwartego Kontur Nyquista Wykres Nyquista (wykreślanie wykresu transmitancji układu otwartego dla określenia stabilności układu zamkniętego) Wykres Cauchy’ego Punktem krytycznym staje się punkt (-1, j0) zamiast punktu (0,j0)
 Wykres Cauchy’ego. Punktem krytycznym staje się punkt (-1, j0) zamiast punktu (0,j0)")
25
Problem stabilności – kryterium Nyquist’a:
1. Czy układ zamknięty posiada bieguny w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s? Wiemy: (patrz początek materiału) Bieguny transmitancji układu zamkniętego Gz(s) są zerami M(s)=1+Go(s) 2. Czy M(s)=1+Go(s) posiada zera w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s? Korzystając z zasady argumentu możemy twierdzić, że liczba tych zer wynosi: Z = P - N 3. Aby układ zamknięty był stabilny: Z=0 lub P=N
 Bieguny transmitancji układu zamkniętego Gz(s) są zerami. M(s)=1+Go(s) 2. Czy M(s)=1+Go(s) posiada zera w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s Korzystając z zasady argumentu możemy twierdzić, że liczba tych zer wynosi: Z = P - N. 3. Aby układ zamknięty był stabilny: Z=0 lub P=N.")
26
Przypomnijmy co reprezentują w tym ujęciu Z, P oraz N?
Z – liczba zer M(s)=1+Go(s) w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s, równa liczbie biegunów układu zamkniętego w prawej półpłaszczyźnie tejże płaszczyzny. Dla stabilnego układu zamkniętego Z musi być równe zero P – liczba biegunów M(s)=1+Go(s) w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s, równa liczbie biegunów układu otwartego w prawej półpłaszczyźnie tejże płaszczyzny. P może być określone wprost lub z kryterium Routh’a N – liczba okrążeń charakterystyki Nyquista układu otwartego punktu (-1,j0). Okrążenia przeciwnie do kierunku ruchu wskazówek zegara są dodatnie, zgodne w kierunkiem ruchu wskazówek zegara są ujemne
=1+Go(s) w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s, równa liczbie biegunów układu zamkniętego w prawej półpłaszczyźnie tejże płaszczyzny. Dla stabilnego układu zamkniętego Z musi być równe zero. P – liczba biegunów M(s)=1+Go(s) w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej s, równa liczbie biegunów układu otwartego w prawej półpłaszczyźnie tejże płaszczyzny. P może być określone wprost lub z kryterium Routh’a. N – liczba okrążeń charakterystyki Nyquista układu otwartego punktu (-1,j0). Okrążenia przeciwnie do kierunku ruchu wskazówek zegara są dodatnie, zgodne w kierunkiem ruchu wskazówek zegara są ujemne.")
27
Kryterium Nyquista można sformułować następująco
Aby układ zamknięty był stabilny, wykres Nyquist’a układu otwartego Go(s)=G(s)H(s) powinien okrążać punkt (-1, j0) tyle razy ile biegunów układu otwartego leży w prawej półpłaszczyźnie zespolonej s; okrążenia wykresu Nyquist’a punktu (-1,j0), jeżeli istnieją powinny być w kierunku przeciwnym do kierunku konturu Nyquist’a Kryterium Nyquista dla bardzo częstego przypadku kiedy P=0 - liczba biegunów układu otwartego w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej wynosi zero, tzn. kiedy układ otwarty jest stabilny Jeżeli układ otwarty jest stabilny, P=0, to aby układ zamknięty był stabilny, wykres Nyquist’a układu otwartego Go(s)=G(s)H(s) nie powinien obejmować punktu (-1, j0)
=G(s)H(s) powinien okrążać punkt (-1, j0) tyle razy ile biegunów układu otwartego leży w prawej półpłaszczyźnie zespolonej s; okrążenia wykresu Nyquist’a punktu (-1,j0), jeżeli istnieją powinny być w kierunku przeciwnym do kierunku konturu Nyquist’a. Kryterium Nyquista dla bardzo częstego przypadku kiedy P=0 - liczba biegunów układu otwartego w prawej półpłaszczyźnie płaszczyzny zmiennej zespolonej wynosi zero, tzn. kiedy układ otwarty jest stabilny. Jeżeli układ otwarty jest stabilny, P=0, to aby układ zamknięty był stabilny, wykres Nyquist’a układu otwartego Go(s)=G(s)H(s) nie powinien obejmować punktu (-1, j0)")
28
Podsumowanie - kryterium Nyquista
Problem: Czy funkcja wymierna 1 + Go(s) ma, czy też nie ma zer w prawej półpłaszczyźnie zmiennej zespolonej s? Rozwiązanie: Wykorzystanie zasady argumentu Cachy’ego Podstawienie Ułatwienie: Wykorzystanie charakterystyki układu otwartego i punktu (-1,j0) jako punktu krytycznego
 ma, czy też nie ma zer w prawej półpłaszczyźnie zmiennej zespolonej s Rozwiązanie: Wykorzystanie zasady argumentu Cachy’ego. Podstawienie. Ułatwienie: Wykorzystanie charakterystyki układu otwartego i punktu (-1,j0) jako punktu krytycznego.")
29
Czy układ zamknięty jest stabilny?
Przykład 1 Rozważmy Czy układ zamknięty jest stabilny? A jeżeli? P=0, N=0; Z=P-N=0

30
K= i i K= i i P=0, N=0; Z=P-N=0 P=0, N=-2; Z=P-N=2

32
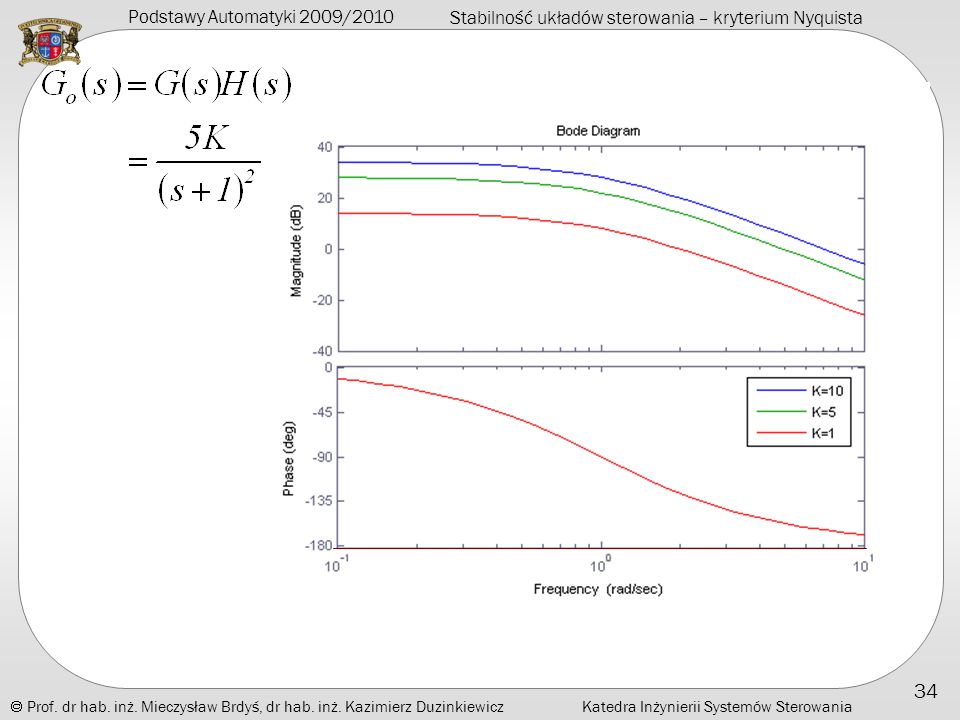
Czy układ zamknięty jest stabilny?
Przykład 2 Rozważmy Czy układ zamknięty jest stabilny? A jeżeli? P=0, N=0; Z=P-N=0

33
K=1 i i K=5 i i K=10 i i P=0, N=0; Z=P-N=0 P=0, N=0; Z=P-N=0 P=0, N=0; Z=P-N=0

35
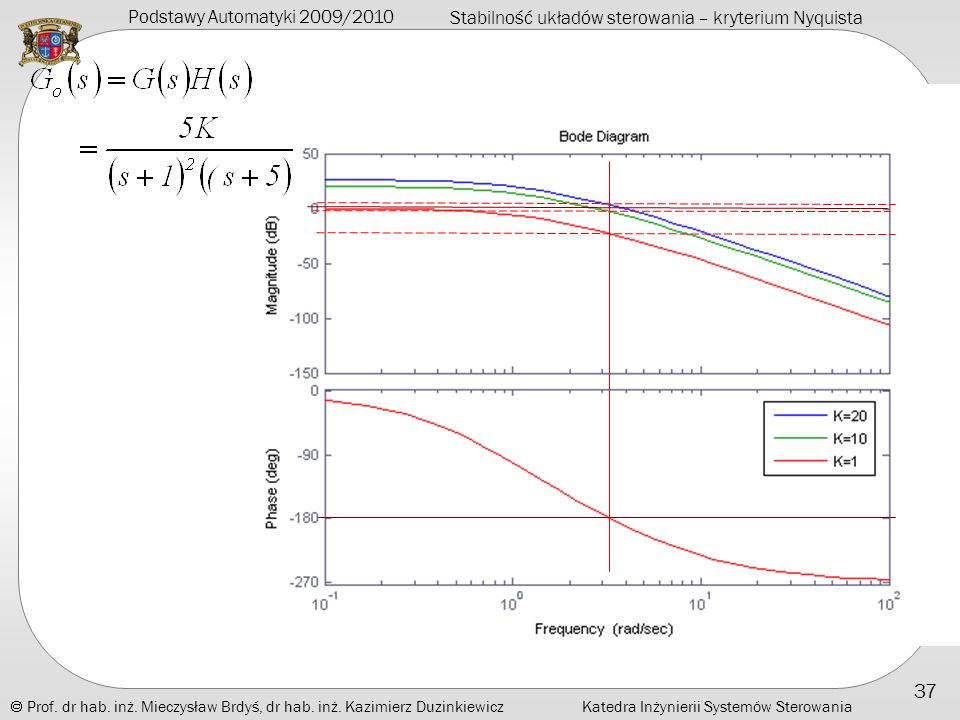
Czy układ zamknięty jest stabilny?
Przykład 3 Rozważmy Czy układ zamknięty jest stabilny? A jeżeli? P=0, N=0; Z=P-N=0

36
K=1 i i K=10 i i K=20 i i P=0, N=0; Z=P-N=0 P=0, N=0; Z=P-N=0 P=0, N=-2; Z=P-N=2

38
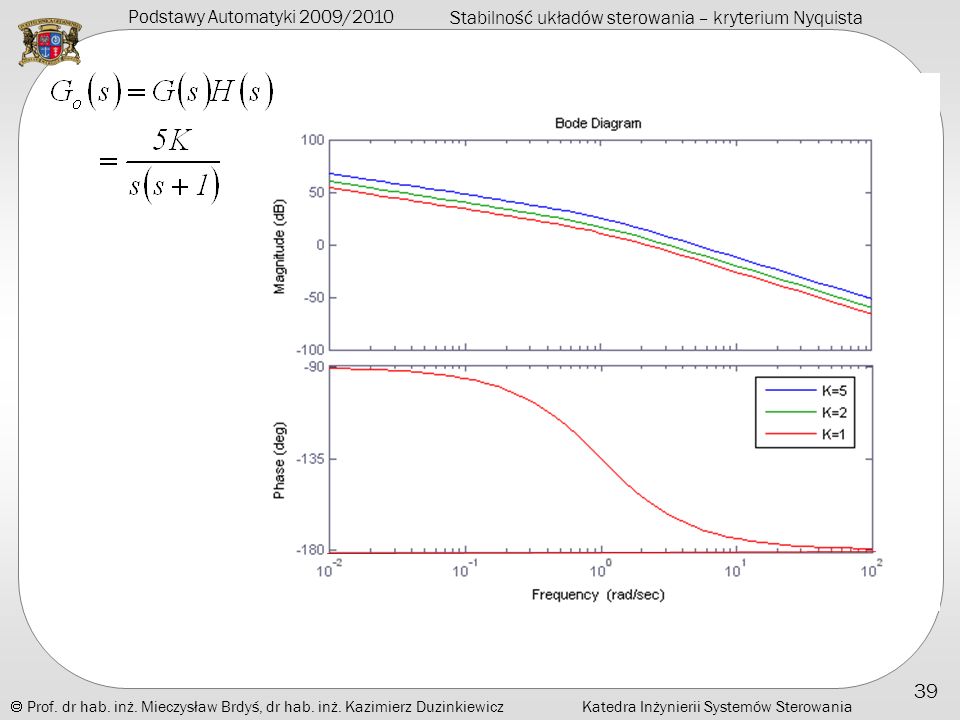
Przykład 4 K=1 i i K=2 i i K=5 i i P=0, N=0; Z=P-N=0 P=0, N=0; Z=P-N=0 P=0, N=0; Z=P-N=0

40
Przykład 5

41
K=0.5 i i K=2 i i K=3 i i K=5 i i Dla wszystkich przypadków: P=0, N=-2; Z=P-N=2

43
Przykład 6 P =0, N = 0; Z=P-N=0

44
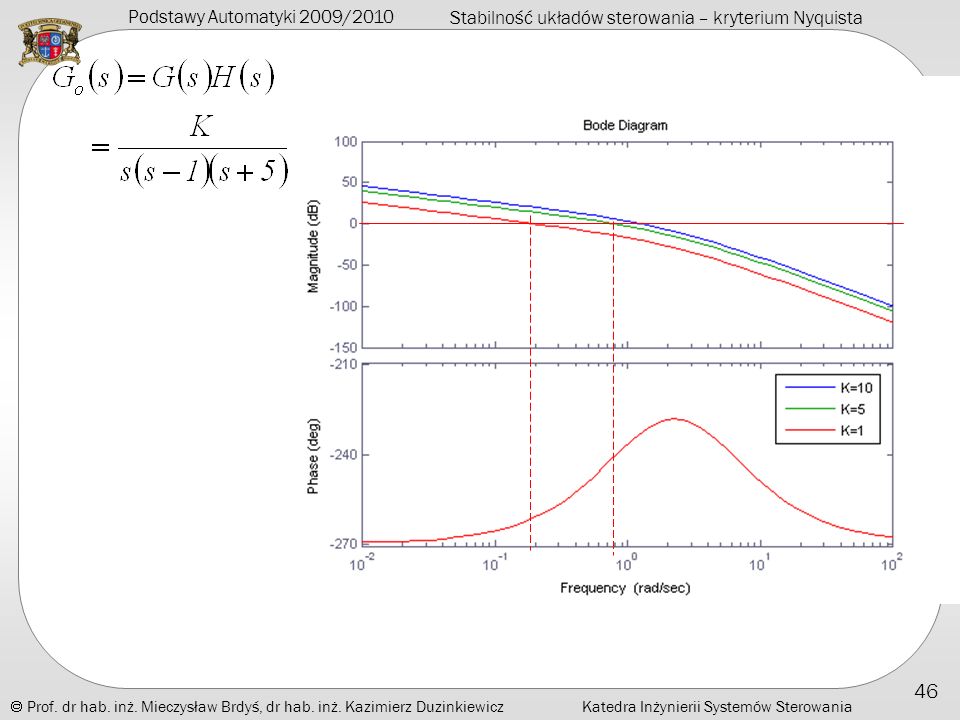
Przykład 7 P =1, N = -1; Z=P-N=2

45
K=1 0.7773 0.2556 K=5 i i K=10 i i

47
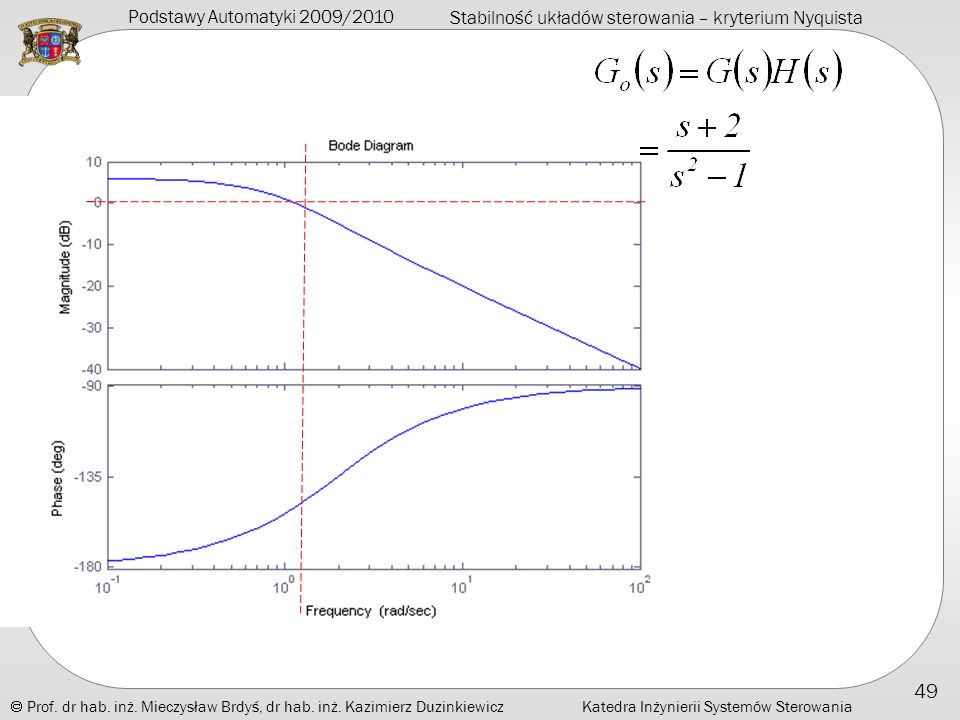
Przykład 8 P =1, N = 1; Z=P-N=0

48
i i

50
Zapas stabilności Istnieje potrzeba określania w jakim stopniu układ jest stabilny – jak daleko znajduje się od punktu w którym stanie się niestabilny Użyteczne idee zapas modułu (wzmocnienia) – gm (2-6) zapas fazy – m (45o – 60o) Obydwie miary określają bliskość wykresu Nyquist’a od punktu krytycznego (1, j0) na płaszczyźnie zmiennej zespolonej
 – gm (2-6) zapas fazy – m (45o – 60o) Obydwie miary określają bliskość wykresu Nyquist’a od punktu krytycznego (1, j0) na płaszczyźnie zmiennej zespolonej.")
51
Zapas modułu (wzmocnienia) – gm
Jeżeli moduł transmitancji układu otwartego, stabilnego układu zamkniętego w punkcie odpowiadającym przesunięciu fazowemu –180o wynosi to zapas modułu (wzmocnienia) wynosi gm= 1/
 wynosi gm= 1/")
52
Zapas fazy – m Jeżeli przesuniecie fazowe transmitancji układu otwartego stabilnego układu zamkniętego w punkcie odpowiadającym modułowi o wartości 1 wynosi to zapas fazy wynosi m =

Podobne prezentacje






 Mówimy, że system jest stacjonarny, jeżeli dowolne przesunięcie czasu dla.>")








>")
>")



>")
