Pobierz prezentację
Pobieranie prezentacji. Proszę czekać

1
Cechy modeli obiektów dynamicznych z przedstawionych przykładów:
czasu ciągłego o parametrach skupionych - opisywane równaniami różniczkowymi zwyczajnymi liniowe – spełniające zasadę superpozycji stacjonarne -o parametrach niezależnych od czasu niejednorodne – w równaniach występują zmienne niezależne – sygnały wymuszeń z jedną lub z wieloma zmiennymi niezależnymi oraz z jedną lub wieloma zmiennymi zależnymi -

2
Czy trudno znaleźć obiekt nieliniowy?
Przykład 1: ciężar o masie M zawieszony na nieważkiej linie o długości L i mogący bez tarcia w punkcie zawieszenia kołysać się w jednej płaszczyźnie Cel budowy modelu: chcemy badać ruch ciężaru przy wytrąceniu go z położenia równowagi (odniesienia)
")
3
Budowa modelu: Prawo równowagi – II zasada dynamiki Newtona dla ruchu obrotowego: Moment bezwładności (liczony względem punktu zawieszenia:

4
Jest to również przykład modelu w postaci równania jednorodnego
Model matematyczny: Równanie różniczkowe: z warunkiem początkowym: Jest to również przykład modelu w postaci równania jednorodnego

5
Dla małych odchyleń od położenia równowagi:
wówczas, równanie różniczkowe: z warunkiem początkowym:

6
Jak możemy traktować modele obiektów dynamicznych?
Przedstawiały one prawo przetwarzania sygnału wejściowego obiektu u(t) w sygnał wyjściowy obiektu y(t) Prawo to umożliwia dla danego kształtu u(t) i znanej wartości y(0) określić kształt y(t) Czy to trudne zadanie? Dla układów liniowych ze stałymi współczynnikami – nie
 w sygnał wyjściowy obiektu y(t) Prawo to umożliwia dla danego kształtu u(t) i znanej wartości y(0) określić kształt y(t) Czy to trudne zadanie Dla układów liniowych ze stałymi współczynnikami – nie.")
7
I. Ogólne spojrzenie na model matematyczny systemu dynamicznego
Każdy system dynamiczny realizuje pewne przekształcenie na sygnale, który pojawia się na jego wejściu tzn. pojawiająca się na jego wejściu funkcja czasu (sygnał wejściowy u(t)) przekształcana jest w określoną funkcję na jego wyjściu (sygnał wyjściowy y(t) ) Z matematycznego punktu widzenia, zasada według której danej funkcji przyporządkowywana jest inna funkcja nazywana się operatorem W modelach matematycznych ten operator określany jest równaniami modelu i Zatem, możemy powiedzieć: każdemu systemowi dynamicznemu odpowiada operator nazywany operatorem systemu A
) przekształcana jest w określoną funkcję na jego wyjściu (sygnał wyjściowy y(t) ) Z matematycznego punktu widzenia, zasada według której danej funkcji przyporządkowywana jest inna funkcja nazywana się operatorem. W modelach matematycznych ten operator określany jest równaniami modelu i. Zatem, możemy powiedzieć: każdemu systemowi dynamicznemu odpowiada operator nazywany operatorem systemu A.")
8
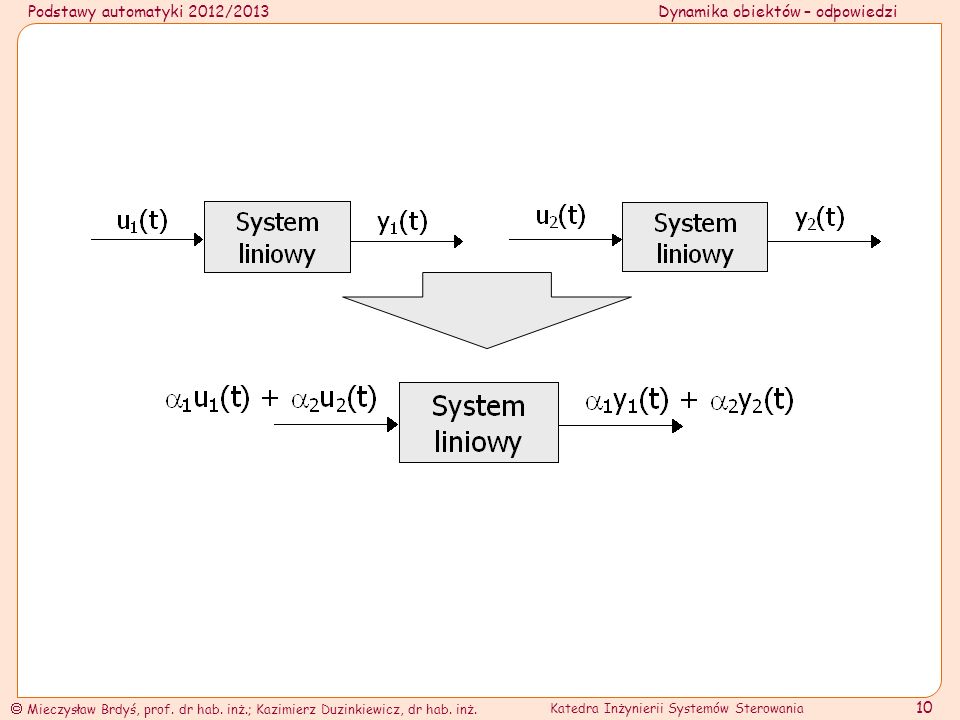
II. System liniowy - spełnia zasadę superpozycji i tylko on
Możemy zasadę superpozycji podać w postaci: System jest liniowy wtedy i tylko wtedy, kiedy spełnia dwa następujące warunki: 1. odpowiedź na sumę dwóch dowolnych wymuszeń jest równa sumie odpowiedzi na każde z nich 2. odpowiedź na dowolnie wzmocnione wymuszenie jest równa tak samo wzmocnionej odpowiedzi na to wymuszenie

9
lub w postaci: System jest liniowy wtedy i tylko wtedy, kiedy spełnia następujący warunek: - odpowiedź na dowolną kombinację liniową dwóch dowolnych wymuszeń jest równa takiej samej kombinacji liniowej odpowiedzi na każde z nich

11
Przykład 1 – test liniowości
System odpowiada na wymuszenie sygnałem przedstawionym na rys.1 a na wymuszenie sygnałem przedstawionym na rys. 2. Odpowiedź systemu na wymuszenie przedstawiona jest jest na rys. 3. Czy jest to system liniowy ze względu na wejścia? System liniowy

12
Przykład 2 – test liniowości
System odpowiada na wymuszenie sygnałem przedstawionym na rys.1 a na wymuszenie sygnałem przedstawionym na rys. 2. Odpowiedź systemu na wymuszenie przedstawiona jest jest na rys. 3. Czy jest to system liniowy ze względu na wejścia? System nieliniowy

13
III. System stacjonarny
System jest stacjonarny wtedy i tylko wtedy, gdy odpowiedź na dowolnie przesunięte w czasie wymuszenie jest równa tak samo przesuniętej odpowiedzi

14
Przykład 3 – test stacjonarności
System stacjonarny

15
System niestacjonarny
Przykład 4 – test stacjonarności System niestacjonarny

16
IV. Skorzystamy z pojęcia jednostkowej funkcji impulsowej zwanej też funkcją delta Diraca lub krótko funkcją delta Definicja: 1. amplituda 2. pole powierzchni pod grafikiem funkcji Powyższą definicję można traktować jako określającą funkcje delta jako różną zeru wszędzie poza chwilą t = 0. Można oczywiście wybrać dowolną chwilę t = t0, 1. amplituda 2. pole powierzchni pod grafikiem funkcji

17
Aproksymacyjna intuicja jednostkowej funkcji impulsowej:

18
Inne definicje i właściwości:
1. Jeżeli jest funkcją ciągłą w lub, jeżeli jest funkcją ciągłą w 2. Jeżeli jest funkcją ciągłą w lub, jeżeli jest funkcją ciągłą w

19
3. Funkcja impulsowa jest funkcją parzystą
4. Dowolną funkcję ciągłą można przedstawić jako czyli , że dowolną funkcję u(t) można przedstawić w postaci sumy nieskończonej składowych o postaci u()(t- )d
 można przedstawić w postaci sumy nieskończonej składowych o postaci u()(t- )d")
20
Przykład 1: obiekt - czwórnik RC
Wróćmy do Przykładu 1 Przykład 1: obiekt - czwórnik RC Cel budowy modelu: ustalenie zależności wiążących napięcie wejściowe czwórnika z napięciem wyjściowym, przy nie obciążonym prądowo wyjściu czwórnika

21
Model matematyczny: Równanie różniczkowe: z warunkiem początkowym: lub:

22
Prawo przekształcenia u(t) w y(t)
Graficzne zobrazowanie: Obiekt dynamiczny Prawo przekształcenia u(t) w y(t) Przykład 1: Struktura modelu - parametr modelu, wzmocnienie sygnału wyjścia
 w y(t) Przykład 1: Struktura modelu. - parametr modelu, wzmocnienie sygnału wyjścia.")
23
Powody ruchu obiektu: 1. Niezerowy warunek początkowy 2. Niezerowy przebieg sygnału wejściowego Poszukamy odpowiedzi obiektu przy działaniu każdego z tych powodów ruchu obiektu oddzielnie 1. Niezerowy warunek początkowy, zerowy przebieg sygnału wejściowego a. - chwila początkowa obserwacji obiektu b. - zerowy przebieg sygnału wejściowego dla chwil późniejszych od rozpoczęcia obserwacji c. - niezerowy warunek początkowy

24
Wizualizacja : Poszukujemy: - odpowiedzi obiektu przy zerowym wejściu (ZI – Zero Input) Model obiektu (przypomnienie ogólnej postaci), dla czwórnika RC, miał postać,

25
(równanie liniowe jednorodne o stałych współczynnikach (stacjonarne))
Przy zerowym wejściu (ZI – Zero Input) model przyjmuje postać (równanie liniowe jednorodne o stałych współczynnikach (stacjonarne)) dla czwórnika RC, Rozwiązanie: 1. Postulujemy rozwiązanie o postaci: 2. Podstawiając postulowaną postać do rozwiązywanego równania:
 model przyjmuje postać. (równanie liniowe jednorodne o stałych współczynnikach (stacjonarne)) dla czwórnika RC, Rozwiązanie: 1. Postulujemy rozwiązanie o postaci: 2. Podstawiając postulowaną postać do rozwiązywanego równania:")
26
3. Ogólna postać rozwiązania:
- stała zależna od warunku początkowego 4. Rozwiązanie spełnia równanie dla wszystkich t, w szczególności zatem dla t=t0: 5. Końcowa postać rozwiązania: Dla czwórnika RC, Fakt znany z fizyki – rozładowywanie się kondensatora o pojemności C przez rezystor o oporności R między okładkami którego panowało początkowo napięcie UC,0 (ładunek zgromadzony w kondensatorze UC,0C)
")
27
Wizualizacja :

28
2. Zerowy warunek początkowy, niezerowy przebieg sygnału wejściowego
Jako niezerowy sygnał wejściowy wybierzemy sygnał impulsowy o intensywności S

29
Mamy zatem: a. - chwila początkowa obserwacji obiektu b. - niezerowy przebieg sygnału wejściowego c. - zerowy warunek początkowy

30
Wizualizacja : Poszukujemy: - odpowiedzi obiektu przy zerowym warunku początkowym (ZS – Zero State) Model obiektu (przypomnienie ogólnej postaci), dla czwórnika RC, miał postać,
, dla czwórnika RC, miał postać,")
31
(równanie liniowe niejednorodne o stałych współczynnikach)
Przy zerowym warunku początkowym (ZS – Zero State) model przyjmuje postać (równanie liniowe niejednorodne o stałych współczynnikach) dla czwórnika RC,
 model przyjmuje postać. (równanie liniowe niejednorodne o stałych współczynnikach) dla czwórnika RC,")
32
Schemat analogowy równania
Etap 1: chwila to Zmiana wartości y(t) z wartości y(t0) =0 do wartości y(t0) = bS Etap 2: chwile t > to Dla chwil t > to układ staje się układem z zerowym wejściem i warunkiem początkowym y(t0) = bS, zatem ostatecznie,
 z wartości y(t0) =0 do wartości y(t0) = bS. Etap 2: chwile t > to. Dla chwil t > to układ staje się układem z zerowym wejściem i warunkiem początkowym y(t0) = bS, zatem ostatecznie,")
33
Odpowiedź układu na impuls Diraca o intensywności S, przy zerowym warunku początkowym nazywamy, odpowiedzią na impuls Diraca lub krótko odpowiedzią impulsową Odpowiedź układu na impuls Diraca o intensywności S = 1, przy zerowym warunku początkowym nazywamy, odpowiedzią na jednostkowy impuls Diraca lub krótko jednostkową odpowiedzią impulsową W rozważanym przypadku: Dla S = 1, jednostkowa odpowiedź impulsowa Dla czwórnika RC, Dla S=1, jednostkowa odpowiedź impulsowa czwórnika RC,

34
Wizualizacja (dla S=1):
:")
35
Zależności dla momentu przyłożenia impulsu:
Interpretacja fizykalna dla czwórnika RC: I. Impuls napięcia podany na wejście czwórnika II. Impuls prądu dopływający do kondensatora Zależności dla momentu przyłożenia impulsu: III. Napięcie na kondensatorze po zaniku impulsu IV. Rozładowanie kondensatora po zaniku impulsu

36
Składowa swobodna odpowiedzi – zależy tylko od warunku początkowego
Znajdziemy pełną odpowiedź obiektu: 1. Niezerowy warunek początkowy 2. Niezerowy przebieg sygnału wejściowego Skorzystamy z zasady superpozycji (patrz II) Składowa swobodna odpowiedzi – zależy tylko od warunku początkowego Składowa wymuszona odpowiedzi – zależy tylko od sygnału wejściowego obiektu - wymuszenia Dla S = 1,
 Składowa swobodna odpowiedzi – zależy tylko od warunku początkowego. Składowa wymuszona odpowiedzi – zależy tylko od sygnału wejściowego obiektu - wymuszenia. Dla S = 1,")
37
Dla czwórnika RC, Dla S = 1,

38
Wizualizacja (dla S=1):
:")
39
Dyskusja idealizacji – odpowiedź wymuszona, impuls o intensywności 1
Odpowiedź impulsowa Aproksymacja dla impulsu o szerokości 1s Aproksymacja dla impulsu o szerokości 0.01s Czas, s

40
Odpowiedź wymuszona, sytuacja ogólna
Zakładamy: - zerowy warunek początkowy

41
Sposób postępowania: Impuls w chwili o intensywności Aproksymacja sygnału wejściowego sygnałem w przedziale czasu

42
Odpowiedź układu wymuszona przez wejście u(t)
Znamy odpowiedź układu w chwili t, y(t) na sygnał impulsowy pojawiający się na wejściu w chwili , o intensywności u Skorzystamy z zasady superpozycji: Ponieważ, to W granicy, 0 Odpowiedź układu wymuszona przez wejście u(t)
 na sygnał impulsowy pojawiający się na wejściu w chwili , o intensywności u Skorzystamy z zasady superpozycji: Ponieważ, to. W granicy, 0. Odpowiedź układu wymuszona przez wejście u(t)")
43
Odpowiedź układu w chwili t jest ważoną „sumą” (całką) wartości sygnalu wejściowego w kolejnych chwilach , u z przedziału t0,t, a wagami są wartości odpowiedzi impulsowej obiektu w przesuniętych t- chwilach czasu Z matematyki: Splot dwóch funkcji f1(t) i f2(t) Zatem: Odpowiedź wymuszona obiektu dynamicznego y(t) przez wejście u(t) jest splotem sygnału wejściowego i odpowiedzi impulsowej tego obiektu
 i f2(t) Zatem: Odpowiedź wymuszona obiektu dynamicznego y(t) przez wejście u(t) jest splotem sygnału wejściowego i odpowiedzi impulsowej tego obiektu.")
44
Przykład – czwórnik RC Przyjmijmy wartości parametrów: R = 10 i C = 0.1F Zatem: Część 1: W chwili t0 = 2s na kondensatorze występuje napięcie początkowe u0 = 2V. W chwili t0 = 2s na wejście układu zostaje podane napięcie stałe u(t) = 4V Wyznacz odpowiedź układu dla t t0 = 2s
 = 4V. Wyznacz odpowiedź układu dla t t0 = 2s.")
45
Rozwiązanie: a. Składowa swobodna odpowiedzi dla b. Składowa wymuszona odpowiedzi dla

46
c. Pełna odpowiedź dla

47
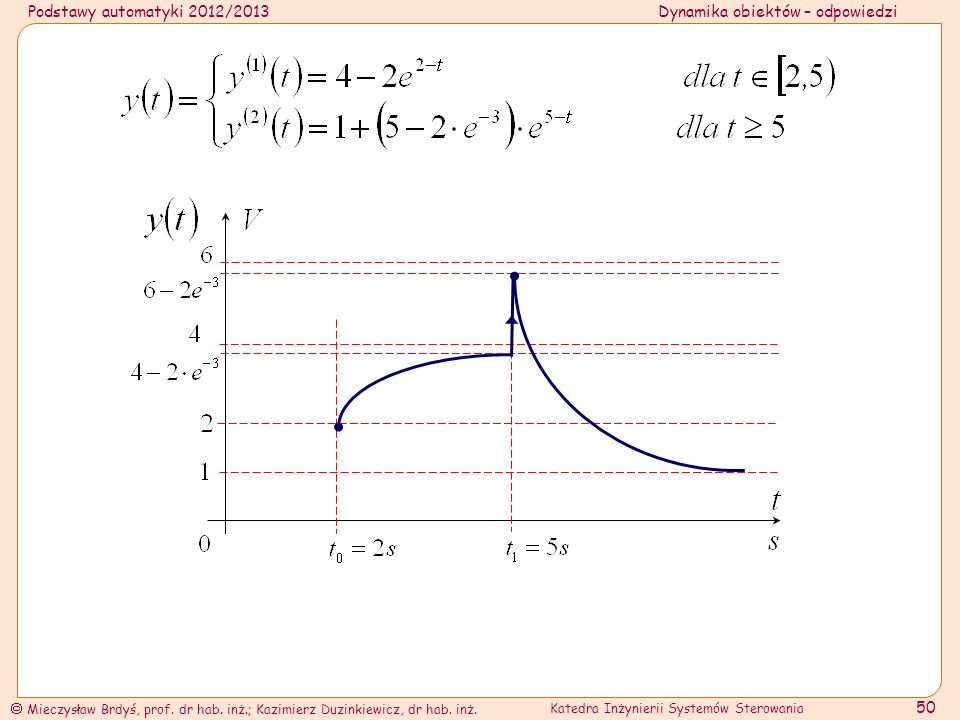
Część 2: Wyznacz odpowiedź obiektu na sygnał wejściowy przedstawiony na rysunku poniżej Obiekt w chwili t0 = 2s znajduje się w stanie (warunek początkowy wyjścia)
")
48
Rozwiązanie: Zauważamy, że warunek początkowy i sygnał wejściowy na przedziale czasu są takie same jak w części 1 a. Pełna odpowiedź obiektu dla będzie taka sama jak dla części 1 b. Dla zachodzi - wkład pełnej odpowiedzi obiektu dla - wkład impulsu - nowy stan w chwili

49
Składowa swobodna odpowiedzi Składowa wymuszona odpowiedzi
c. Pełna odpowiedź obiektu dla wyznaczamy jako odpowiedź obiektu znajdującego się w chwili w stanie i na wymuszenie (sygnał sterujący) stałe o wartości 1V Składowa swobodna odpowiedzi Składowa wymuszona odpowiedzi
 stałe o wartości 1V. Składowa swobodna odpowiedzi. Składowa wymuszona odpowiedzi.")
Podobne prezentacje


 Mówimy, że system jest stacjonarny, jeżeli dowolne przesunięcie czasu dla.>")
>")













 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów regulacji.>")

 liniowych jednowymiarowych (o jednym wejściu i jednym wyjściu) obiektów, elementów i układów.>")